
Fターム[3C269AB33]の内容
数値制御 (19,287) | 作業内容、対象機器、対象製品 (2,914) | 産業用ロボット、マニピュレータ (633)
Fターム[3C269AB33]に分類される特許
201 - 220 / 633
ロボット制御方法、ロボット制御プログラムおよびロボット制御方法に用いられるティーチングペンダント
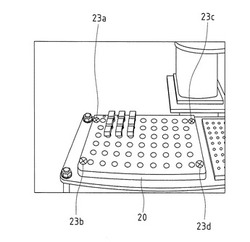
【課題】作業者がティーチングペンダントなどを操作して実際のロボットハンドの位置や向きの変更を繰り返すティーチング作業を行うことなく、自動的にティーチングを行うことが可能なロボット制御システムの教示方法およびその教示方法によって教示を行うロボット制御システムを提供する。
【解決手段】
教示方法の一実施形態は、トレイ20のマーカー23が含まれるように可搬型カメラ8で撮像する第1撮像工程と、その画像からマーカー23を検出して、トレイ20毎に予め登録されているデータとの照合などの判断を行う第1画像処理工程と、該当するマーカー23に応じた初期位置へロボットハンド31を移動させる初期移動工程と、ロボットハンド31の小型カメラ34によってマーカー23の少なくとも1つが含まれるように撮像する第2撮像工程と、その画像からマーカー23の位置誤差を検出する第2画像処理工程とを含む。
(もっと読む)
N個のロボットを同時に制御するロボット制御装置

【課題】ロボットを容易に追加および削除できると共に低コストで小型にする。
【解決手段】N個(N≧2)のロボット(R1〜Rn)を同時に制御するロボット制御装置は、メイン制御ユニット(MCU)を具備し、メイン制御ユニットは、N個のロボットのそれぞれの動作指令を作成するメインプロセッサ(MP)と、メインプロセッサにより作成された動作指令に基づいてロボットのそれぞれを駆動するサーボモータの動作量を算出するサーボプロセッサ(SP)と、を含んでおり、さらに、メイン制御ユニットに接続された、N個のアンプユニット(AU1〜AUn)を具備し、サーボプロセッサにより算出されたサーボモータの動作量に基づいてN個のロボットのうちの1個のロボットのサーボモータを駆動するサーボアンプ(SA1〜SAn)、を含む。
(もっと読む)
ロボット制御システムの教示用補助具、その教示用補助具を用いた教示方法、およびその教示方法によって教示を行うロボット制御システム
【課題】ティーチング作業をより簡略するとともにティーチング時間のさらなる短縮を可能とするためのロボット制御システムの教示用補助具、その教示用補助具を用いた教示方法、およびその教示方法によって教示を行うロボット制御システムを提供する。
【解決手段】撮像装置を用いて教示を行うことが可能なロボット制御システムの教示用補助具の一実施形態であるティーチングツール50は、角錐面52a、52b、52cの色が互いに異なる三角錐部52を有するツール本体51と、このツール本体51に連結されたハンドル54とを備える。
(もっと読む)
教示ライン補正装置、教示ライン補正方法、及びそのプログラム
【課題】基準部位の相関関係が異なっていた場合も、その誤差の影響を緩和し、ティーチングデータを精度良く補正するための教示ライン補正装置、教示ライン補正方法、及びそのプログラムを提供する。
【解決手段】予め設定された基準部位の第1基準位置aと第2基準部位の第2基準位置bとを通る線を含む平面であり、且つ、第3基準部位の第3基準位置cで決定される第1平面を規定し、検出した第1基準部位の位置a´と、検出した第2基準部位の位置b´とを通る線を含む平面であり、且つ、検出した第3基準部位の位置c´で決定される第2平面を規定し、第1基準部位を原点とし、原点の前記第1基準部位の前記第1基準位置が、検出した原点の前記第1基準部位の位置と同じ位置になり、且つ、該第1平面が該第2平面と同一平面上となる補正量を算出し、該算出した補正量に基づいて、動作ポイントが教示された基準座標を補正する教示ライン補正部とを備える。
(もっと読む)
動作入力装置
【課題】 イネーブルスイッチを操作しながら、他の入力操作を行うことができる動作入力装置の提供
【解決手段】 ティーチング装置1は、把持部11及び操作部13を有している。使用者は、ティーチング装置1を使用する際に、把持部11を掌及び第二指〜第五指を用いて把持する。操作部13は、把持部11を使用者が把持したときの第二指側に、把持部11に続いて配置されている。把持部11は、イネーブルスイッチ111を有している。使用者は、第二指〜第五指を用いてイネーブルスイッチ111を操作する。入力部131は、操作部13において把持部11が配置されている側とは反対側に位置する面P13に配置されている。これにより、把持部11を掌及び第二指〜第五指で把持しながら、入力部131への第一指による操作が可能となる。なお、入力部131は、タッチパッド133、液晶ディスプレイ135及び表示制御部137により構成されている。
(もっと読む)
ロボットアームの制御プログラム及び制御システム
【課題】ハンド部を適切な位置に停止させることができるロボットアームの制御プログラムを提供する。
【解決手段】本発明に係るロボットアームの制御プログラムは、ロボットアームのハンド部を、把持対象物に向かって移動させる処理と、ハンド部に設けられた距離測定部に、ハンド部と把持対象物との距離を測定させる処理と、距離測定部がハンド部と把持対象物との距離の測定が不能となると、測定不能となる直前のハンド部と把持対象物との距離と、ロボットアームの関節部の角度から算出させた、測定不能となった後のハンド部の移動距離と、に基づいて、ハンド部と把持対象物との距離を推定させる処理と、推定させたハンド部と把持対象物との距離が閾値以下となると、ハンド部を把持対象物に向かって移動させる動作を停止させる処理と、をコンピュータに実行させる。
(もっと読む)
情報処理方法及び装置並びにプログラム
【課題】マニュピュレータを対象物まで短時間で移動させること。
【解決手段】対象物であるボルト穴を視認可能なカメラが取り付けられたマニュピュレータを、複数の対象物まで移動させる制御を行う装置が、複数の対象物の各々の位置に対応させて予め設定された目標位置TPi’に向けて、マニュピュレータを移動させるティーチングプレイバック制御を実行する(ステップS3)。装置は、マニュピュレータが目標位置TPi’に移動した場合、目標位置TPi’に対応する実穴位置Hiについての実誤差量diを検出する(ステップS5)。装置は、実誤差量d1乃至diの履歴のうち、少なくとも1回分の履歴を用いて、次のi+1回目の目標位置TPi+1’を更新する(ステップS10,S12,S13)。
(もっと読む)
情報処理方法及び装置並びにプログラム
【課題】高速、高精度、かつ制御系として安定に、マニュピュレータを対象物まで移動させること。
【解決手段】装置は、カメラが取り付けられたロボットアームを、対象物まで移動させる移動制御を行う。すなわち、装置は、対象物が検知されていない場合、対象物の位置に基づいて予め設定された目標位置までの経路に沿って、マニュピュレータを移動させるティーチングプレイバック制御を実行する(ステップS1)。装置は、対象物が検知された場合、目標位置よりも対象物に近い位置を新たな目標位置として、新たな目標位置までの新たな経路を設定して、移動制御を切り替えるための切替条件が満たされるまでの間、新たな経路に沿って、マニュピュレータを移動させるティーチングプレイバック制御を実行する(ステップS3及びS4)。装置は、切替条件が満たされた場合、視覚サーボ制御を実行する(ステップS5)。
(もっと読む)
ロボットティーチング装置
【課題】カメラを接続して映像を取り込んで行うティーチングはもちろん、カメラを使用しないオフライン作業においても、簡単にロボットのティーチングと同時にプログラミングができるロボットティーチング装置を提供する。
【解決手段】ロボットティーチング装置は、画像データ入力機能、ロボット動作プログラム作成機能及びロボット位置座標データ作成機能を有するコンピュータ、入力される画像データを表示するディスプレイ、及び上記ディスプレイに表示された画像の位置を指定するポインティングデバイスを備えたロボットティーチング装置において、上記コンピュータは、上記ポインティングデバイスにより指定された上記ディスプレイに表示された画像の位置情報に基づいて、ロボット位置座標データを作成する。
(もっと読む)
情報処理方法及び装置並びにプログラム
【課題】高速、高精度、かつ制御系として安定に、マニュピュレータを対象物まで移動させること。
【解決手段】装置は、カメラが取り付けられたロボットアームを、対象物まで移動させる移動制御を行う。すなわち、装置は、対象物の位置に基づいて予め設定された目標位置までの経路に沿って、マニュピュレータを移動させるティーチングプレイバック制御を実行中に、対象物が検知された場合、視覚サーボ制御を実行する。装置は、この視覚サーボ制御を実行する上で、マニュピュレータの所定の状態に基づいて、視覚サーボ制御係数に含まれる係数の少なくとも一部を変更する(例えば実施形態におけるビジュアルインピーダンス制御の移動処理のステップS32,S33,S36,S37)。
(もっと読む)
ロボットの動作診断方法、ロボットの制御装置、ミニエンバイロメントシステムの制御装置、ロボット、及びミニエンバイロメントシステム
【課題】ロボット動作を診断して不具合を回避することができ、かつ、異常部位の詳細表示やパネル上でのロボット動作の再現により、メンテナンス時間を短縮できるロボットの動作診断方法を提供する。
【解決手段】複数の駆動軸をそれぞれ駆動する複数のモーター、マニピュレータ、及びセンサを有し、駆動軸によりマニピュレータを移動させるロボットの動作診断方法において、少なくとも1つの駆動軸に対し、ロボットの診断対象とする動作パターンを設定し、ロボットの初期状態での動作パターンにおいて、複数回計測したモーターを制御する制御装置の複数の入出力信号と、センサまたはマニピュレータを制御する機器の複数の入出力信号とを判定データとし、新たに計測した判定データを診断データとし、統計的パターン認識方法により診断データが判定データに含まれるかを判別することにより、新たに計測した時のロボットの動作が正常であるか判定する。
(もっと読む)
可動電極による溶接ワーク位置検出方法
【課題】スポット溶接システムにおいて、溶接ワークの表面位置の検出に要する時間を長くすることなく、可動電極による溶接ワークの表面位置の検出精度を向上させる。
【解決手段】サーボモータ34によって駆動される可動電極30とこれと対向して配置される対向電極32とを有するスポット溶接ガン14と、溶接ワークWとスポット溶接ガン14のうちの一方を保持する多関節ロボット12とを備えるスポット溶接システムにおいて、多関節ロボット12を用いて溶接ワークWとスポット溶接ガン14とを相対移動させることにより、可動電極30と溶接ワークWとを互いに離れた状態から接近させながら又は可動電極30と溶接ワークWとを互いに接触した状態から離反させながら、サーボモータ34の電流又はトルクを監視し、電流又はトルクの変化傾向が変化したときの可動電極30の位置と多関節ロボット12の位置とから溶接ワークWの表面位置を検出する。
(もっと読む)
搬送動作ティーチング方法
【課題】実物のワークが無くても、搬送装置に対してティーチングを行うことができ、多種類のワークを対象とする場合でも簡便にティーチングを行うことができ、ワークの把持位置を正確にティーチングすることができ、把持機構の部品を交換した場合の再ティーチングを簡単に行うことができる搬送動作ティーチング方法を提供する。
【解決手段】搬送動作ティーチング方法は、ワーク12を載置するためのパレット14上にある任意の箇所(基準部52)を、ワーク12を搬送する軌跡の基準点として設定する基準点設定工程と、予め、搬送装置10を動作させるための動作情報であって、基準点を原点とした座標系にて、基準点を基準に所定の軌跡に沿ってワーク12を搬送する動作を指示する動作情報を作成する動作情報作成工程と、動作情報に従って動作する搬送装置10に、実際のパレット14上にある基準点をティーチングするティーチング工程とを有する。
(もっと読む)
溶接ワーク位置検出方法
【課題】スポット溶接システムにおいて、溶接ワーク、スポット溶接ガン及び多関節ロボットの剛性に依存することなく、溶接ワークの対向電極側表面位置を正確に検出する。
【解決手段】サーボモータ34によって駆動される可動電極30とこれと対向して配置される対向電極32とを有するスポット溶接ガン14と、溶接ワークWとスポット溶接ガンの一方を保持する多関節ロボット12とを備えるスポット溶接システムにおいて、可動電極を溶接ワーク表面に接するように位置決めした後、サーボモータで可動電極を対向電極に接近させる方向に移動させると同時に、多関節ロボットを用いて対向電極と溶接ワークとを接近させる方向に同じ速度で相対移動させながら、可動電極の移動速度及び加速度の少なくとも一方を監視することにより、対向電極と溶接ワークとの接触を検出し、このときの対向電極の位置から溶接ワークの対向電極側表面位置を検出する。
(もっと読む)
ロボット制御システム、ロボット制御方法
【課題】高速かつ遅延の少ないデータ送受信をPCと動作制御装置との間で行うことができるロボット制御システムおよびロボット制御方法を提供することを課題としている。
【解決手段】ロボット制御システム1は、動作制御装置2と動作指示装置3を備え、動作制御装置2は、通信部201と、プロキシ部202と、プログラム記憶部203と、コントローラー統括部204と、プログラム実行部205と、ロボット制御部206とを備え、ロボット4が接続されている。動作指示装置3は、通信部301と、プロキシ部302と、データ読出・書込部303と、データ記憶部304と、プログラム部305と、入出力部306とを備え、画像表示装置5と入力装置6が接続されている。また、動作制御装置2と動作指示装置3は、LAN等のネットワークやUSB I/Fを介して接続している。
(もっと読む)
ロボット制御装置およびロボット制御方法
【課題】動作制御部と動作指示部の電源が遮断された場合においても正常にロボットの動作停止を行え、また、正常に動作制御部と動作指示部を正常に終了するロボット制御装置およびロボット制御方法を提供することを課題としている。
【解決手段】ロボット制御装置1は、動作制御部2と動作指示部3と電源部5を備え、ロボット4が接続されている。動作制御部2は通信部201とプログラム記憶部203とプログラム実行部204とロボット制御部205と電源遮断検出部206とシャットダウン実行部207を備え、動作指示部3は通信部301と電源遮断信号抽出部302とデータ読出・書込部303とデータ記憶部304とシャットダウン信号生成部305とシャットダウン実行部306と電源制御信号生成部307を備え、電源部5は電力変換部501とUPS502と電源制御部503とスイッチ504を備えている。
(もっと読む)
干渉チェック方法、干渉チェック装置、及び干渉チェックプログラム
【課題】三次元物体同士の干渉の有無の評価と併せて、両者の隙間距離や最近傍位置の評価を高速に処理する。
【解決手段】干渉チェック装置10は、仮想空間をメッシュ分割して小さな領域に細分化する空間細分化部11、メッシュの各頂点と基準物体オブジェクトの表面までの最短距離と方向を算出して各メッシュ頂点に付随する情報として登録することで基準物体オブジェクトまでの最短距離マップを作成する最短距離マップ作成部12、移動物体オブジェクト上に基準物体オブジェクトまでの最短距離を評価するための評価点を設定する最短距離評価点設定部13、最短距離評価点の座標値に基づいて最短距離マップを参照することで基準物体オブジェクトまでの最短距離を取得する干渉チェック部14を備える。
(もっと読む)
ロボット制御システム
【課題】
操作者がコントローラに設けられた第1接続確認操作手段を操作すると、コントローラの第1表示手段と、可搬式操作部に設けられた第2表示手段が同時に第1接続確認操作手段が操作される前の第1表示状態から第2表示状態に変化するため、操作者が把持している乾式操作部とコントローラの接続関係の誤認識を確実に防止できるロボット制御システムを提供する。
【解決手段】
コントローラ20AとTP10と通信接続が完了した後、コントローラ20Aが教示モードに設定されている際に、操作者がコントローラ20Aに設けられた運転準備ボタン58aを押すと、運転準備ボタン58aの運転準備ボタン表示灯63と、TP10の非常停止ボタン表示灯141aが同時に消灯から点滅パターンに変わるので、操作者が把持しているTP10とコントローラ20Aの接続関係の誤認識を確実に防止できる。
(もっと読む)
キャリブレーション装置及びキャリブレーション方法
【課題】視覚センサを用いてロボットをキャリブレーションする場合に、構成が簡単で正確かつ容易にキャリブレーションが可能なキャリブレーション装置及びキャリブレーション方法を提供すること。
【解決手段】アーム部と、前記アーム部の位置及び姿勢を検出する位置検出手段と、前記アーム部の位置及び姿勢を制御する制御部60とを備えたロボット5のキャリブレーション装置2であって、基準平面部に面内の方向を特定する複数の交差する溝部が形成され、前記溝部のうち交差する2つの溝部のそれぞれの側壁が接続される稜線が前記基準平面部に形成する角部のうち3つを校正点として有するキャリブレーション治具40と、視覚センサ12により撮像した前記キャリブレーション治具40の画像に基づき前記キャリブレーション治具40の位置及び姿勢を認識する物体認識装置10とを備えることを特徴とする。
(もっと読む)
ロボット制御システムにおける通信接続方法及びロボット制御システム
【課題】
コントローラによるロボットの運転状態が再生モードである場合、可搬式操作装置のコントローラに対する通信接続を、生産に影響することなく円滑に行うことができるロボット制御システムにおける通信接続方法を提供する。
【解決手段】
ロボット制御システム100における通信接続方法は、TP10から、ネットワークを介してコントローラ30に通信のログイン要求(接続要求)があった場合、TP10に設けられたログイン処理部18が、非常停止スイッチ12の操作状態、及び、コントローラ30のモード状態を取得して、非常停止スイッチ12の操作状態が非常停止状態で、かつ、モード状態が再生モードのときは、通信の接続要求後のコントローラ30に対する通信接続を認めず、そうでない場合には、通信接続を認可する。
(もっと読む)
201 - 220 / 633
[ Back to top ]