
Fターム[3C269MN02]の内容
数値制御 (19,287) | 安全、監視、試験、診断、異常検出 (2,108) | 検出の対象箇所 (790) | 数値制御装置 (82)
Fターム[3C269MN02]の下位に属するFターム
プログラム作成装置、教示手段 (1)
Fターム[3C269MN02]に分類される特許
1 - 20 / 81
工作機械
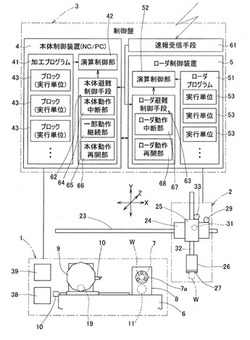
【課題】 地震による損傷を防止すると共に、緊急地震速報が誤報であった場合にも、作業者よる加工再開の操作を必要とせずに加工が再開できて、加工精度が低下することを抑えることができ、かつワークに加工中断の痕跡を残すことがないようにする。
【解決手段】 本体制御装置4に、速報受信手段61による緊急地震速報の受信に応答して、工作機械本体1に一連の避難動作を行わせる本体避難制御手段62を設ける。この手段62は、現在実行中の実行単位43の終了後に加工プログラム41の実行を中断し、工作機械本体1に退避動作を行わせる本体動作中断部62を有する。また、前記中断の後、定められた経過時間後に、工作機械本体1を退避動作前の状態に戻すと共に、加工プログラム41の実行を再開させる本体動作再開部66を有する。
(もっと読む)
通信システム、制御装置、通信装置、制御方法、通信方法、及びプログラム

【課題】 伝送遅延を考慮するのみでは、フィードバック制御を行う周期を最速化することが困難であった。
【解決手段】 制御装置は、通信を介して所定の動作を実行する複数の駆動装置を制御する制御装置であって、複数の駆動装置のそれぞれが信号を受信して当該信号に応じて動作を実行できる状態となるまでの駆動準備時間と、複数の駆動装置のそれぞれと制御装置との信号の伝送に要する伝送遅延とを取得し、駆動準備時間と伝送遅延とに基づいて、複数の駆動装置を制御するための信号を当該複数の駆動装置へ送信する順序を決定し、決定した順序に基づいて、複数の駆動装置へ信号を送信する。
(もっと読む)
ロボットシステム
【課題】複数のロボットを制御するロボットシステムにおいて、意図するロボットに対して操作機により作業者が正確に動作指示を与えることを可能とする。
【解決手段】ロボットシステムは、ロボットRB1,RB2、RB3と、各ロボットの動作を制御するコントローラ10と、ケーブル11,12,13と、手動操作されることでコントローラ10を通じて各ロボットを動作させるティーチングペンダント20と、各ロボットに関する情報を表示するディスプレイ22と、を備える。コントローラ10は、ケーブル11,12,13を通じて電圧が供給される際の電圧降下量に基づいて、コントローラ10に対する各ロボットの距離である対制御装置距離を算出し、各ロボットの互いの位置関係と対制御装置距離とに基づいて、各ロボット及びコントローラ10の配置であるシステム配置を算出し、システム配置をディスプレイ22に表示させる。
(もっと読む)
工作機械の移設検出装置
【課題】当初の設置場所からの不適切な移設による機械の精度低下、機能低下、寿命低下などを防止すると共に、機械の移設先や移設履歴を知ることもできる工作機械の移設検出装置を提供する。
【解決手段】工作機械又はNC装置のフレームに掛かる荷重の変化を、フレームの歪の変化として検出する歪検出手段と、検出した歪の変化量が、予め定められたしきい値を超えた場合に工作機械の移設が行われた旨の移設判定を行う判定手段と、移設判定を記憶する記憶手段と、NC装置に工作機械の起動指令が与えられた時に前記記憶手段の内容を読取ることができない場合又は記憶手段が移設判定を記憶している場合に、NC装置に動作制限信号を出力する制限情報出力手段と、動作制限信号に基づく動作制限を解除するためのリセット信号を出力すると共に記憶手段の記憶内容を初期化するリセット手段とを備えている。
(もっと読む)
ロボットのコントローラ
【課題】電源からロボット用電源とコントローラ用電源とを分岐して供給する構成のロボットシステムで、大電流を流すサーキットプロテクタを設けない構成とする。
【解決手段】電源スイッチがオンされると、スイッチング制御回路が動作を開始し、コンバータ回路のスイッチング素子のオンオフ制御で制御用電源がCPUに供給され、自己の動作電源をコンバータ回路からダイオードを介して給電する。CPUにより、コンタクタがオンされてロボット用電力が供給される。電源スイッチがオフされると、CPUにより、給電監視手段によるダイオードブリッジへの給電停止の検出をもってスイッチのオフ状態が判断され、平滑コンデンサの充電電荷を電源として動作する期間中に、ロボット本体の停止制御の実行後に前記コンタクタがオフされる。
(もっと読む)
数値制御装置
【課題】軸ごとの電力を正確に算出する数値制御装置を提供する。
【解決手段】コンバータ部110の出力電力を取得するコンバータ電力取得手段300と、モータ13−1〜13−Nの出力を軸ごとに算出するモータ出力算出手段310と、コンバータ出力電力とモータ出力の全軸に関する総和との差を全損失として算出する全損失算出手段340と、モータの損失を軸ごとに算出するモータ損失算出手段320と、アンプの損失を軸ごとに算出するアンプ損失算出手段330と、モータ損失とアンプ損失との和を軸損失として軸ごとに算出する軸損失算出手段350と、軸損失の全軸に関する総和に対する、軸毎の軸損失の比率に基づいて、全損失を軸毎に分配した損失を軸ごとに求める損失分配手段360と、モータ出力と分配軸損失との和を軸電力として軸ごとに求める軸電力算出手段370とを備える。
(もっと読む)
ロボットのコントローラ
【課題】ロボットのコントローラにおいて、特別なハードウェアを追加することを抑制しつつ、被検出対象が異常であることをより確実に検出する。
【解決手段】ロボットのコントローラ20は、メイン制御基板21及び第1サブ制御基板22を備える。制御基板21,22の各FPGA31は、所定速度でカウントを行うタイムカウンタTCを有し、タイムカウンタTCの値に基づいて所定規則で1ビットの参照値及び信号値POUTをそれぞれ算出し、タイムカウンタTCの値が所定値になった時に、1ビットの信号値POUTの入力及び1ビットの信号値POUTの出力をそれぞれ行う。制御基板21のFPGA31は、信号値POUTが参照値と一致しないことを条件として異常であることを検出する。第1CPU34は、上記2つのタイムカウンタTCの値を一致させた後に、制御基板21のFPGA31に異常の検出を開始させる。
(もっと読む)
振動抑制機能を備えた数値制御装置
【課題】さまざまな指令回転速度において、記録された最適回転速度への置換えを可能とする。
【解決手段】数値制御装置は、加工プログラムから回転軸の指令回転速度を抽出するプログラム解析部19と、びびり振動を抑制可能な複数個の最適回転速度が記録され
る最適回転速度記録部16と、抽出された指令回転速度に応じて、前記複数個の最適回転速度の中から一つの最適回転速度を選択して、実際の加工で用いる指令回転速度
とする指令回転速度置換え判定部17と、を備える。指令回転速度置換え判定部は、抽出された指令回転速度に基づいて、置換え可能な最適回転速度の範囲である置換回
転速度範囲を求め、前記複数個の最適回転速度のうち当該置換回転速度範囲内にある最適回転速度を、実際の加工で用いる指令回転速度として選択する。
(もっと読む)
数値制御装置、制御プログラム及び記憶媒体
【課題】複数の操作パネルの表示を消灯した場合であっても、作業者が操作可能である操作パネルを探す必要がなく、作業効率の低下を防ぐことができる数値制御装置、制御プログラム及び記憶媒体を提供する。
【解決手段】CPUは、サブパネルの操作が有効であるときに、作業者によるサブパネルの操作がない時間が所定時間以上であるか否か判断する(S50)。作業者によるサブパネルの操作がない時間が所定時間以上であると判断した場合、CPUはメインパネル及びサブパネルのディスプレイを消灯する(S60)。CPUは、メインパネル及びサブパネルのディスプレイを消灯した場合に、サブパネルの操作を無効に切り替え、メインパネルの操作を有効にする(S70)。
(もっと読む)
パソコン機能を有する数値制御装置
【課題】パソコンのオペレーティングシステムが起動しない場合でも、数値制御装置の画面を表示する。
【解決手段】パソコン100に接続された記憶装置は、領域1に汎用OSと表示アプリを、領域2に保守用OSと数値制御装置の画面を表示する表示アプリを格納する。(1)数値制御装置200は、パソコン100を起動する信号をパソコン100に送る。(2)パソコン100は、保守用OSを起動し、従来通りに汎用OSを起動する。(3)汎用OSが起動した場合、数値制御装置200に起動完了を通知し、表示アプリを実行する。(4)パソコン100からの起動完了の通知が無い場合、数値制御装置200は、パソコン100をリセットし再起動する。(5)数値制御装置200は、保守用OSで画面を表示するための起動信号をパソコン100に送信する。(6)パソコン100は再起動後、保守用OSを起動し、保守用表示アプリを実行してCNC画面を表示する。
(もっと読む)
電子機器、および制限解除方法
【課題】工作機械の作動制限が不正に解除されることを防止可能な電子機器を提供する。
【解決手段】電子機器20は、現在地の位置情報を取得するGPSドングル200と、工作機械30の供給者側装置であるサーバ装置10に予め登録された工作機械30の据付予定位置を示した据付予定位置情報を、サーバ装置10から取得するCP10とを備える。電子機器20は、取得した現在地の位置情報と取得した据付予定位置情報とを比較し、現在地が予め登録された据付予定位置を基点とした一定範囲内であるかどうかを判定する。電子機器20は、現在地が据付予定位置を基点とした一定範囲内であると判定した場合、所定の条件が成立したか否かを判定する。電子機器20は、所定の条件が成立したと判定した場合、工作機械30に対して情報入力処理を行なうことにより、工作機械30の作動制限を解除する。
(もっと読む)
ロボット制御システム
【課題】
1台の可搬式操作部を、複数のコントローラにつなぎ換えて使用する場合、操作者のミスにより意図せぬロボットと接続してしまい、意図せぬロボットを操作してしまうことを防止する。
【解決手段】
ロボット制御システムは、ティーチペンダント10と無線通信で情報を送受信する複数のコントローラ20Aと、コントローラ20A毎に接続されるとともに該コントローラ20Aにより制御可能なロボットを備える。コントローラ20Aは、ティーチペンダント10と接続関係が構築された際、ロボットモータを制御するサーボドライバ27に電力供給遮断を行うマグネットスイッチMSに対して電力遮断指令を付与するマグネットスイッチ制ラダー部60を備える。マグネットスイッチMSは、電力遮断指令に基づいてサーボドライバ27への電力を遮断する。
(もっと読む)
加工装置
【課題】 メイン操作パネルから離れた場所でメンテナンス作業を行う場合の便宜性を図った加工装置を提供することである。
【解決手段】 制御手段に接続された操作キーを有する操作パネルによって操作され、側面及び/又は背面にオペレータがメンテナンス作業を行う作業領域を備えた加工装置であって、該操作パネルは加工装置の正面に設けられたメイン操作パネルと、該作業領域近傍に設けられたメンテナンス操作パネルとからなることを特徴とする。
(もっと読む)
停電時制御装置
【課題】工作機械で停電時の制御を行なう停電時制御装置において、抵抗放電ユニットや無停電電源装置を追加することなく、ワークと工具とを干渉しない領域まで退避させることによって、ワークまたは工具の破損を回避することができる。
【解決手段】入力電源1を監視して、停電を検出した場合には、サーボモータ用アンプ3,4にサーボモータ7,8の制御状態のまま減速停止を指令するとともに、スピンドルモータ9に通電遮断を指令する停電検出部10’と、前記停電検出部10’からの停電検出信号に応じてパワー回路2とサーボモータ用アンプ3,4とスピンドルモータ用アンプ5の直流電圧低下異常のアラームしきい値を通常運転時の値から停電時の値へと変更するアラームしきい値変更部11と、前記停電検出部10’からの停電検出信号に応じてあらかじめ規定した微小距離だけサーボモータ用アンプ3,4に退避動作を指令する退避動作指令部12を設ける。
(もっと読む)
可動機械制御装置及び可動機械制御システム
【課題】
非常停止SWを備えた着脱可能な教示操作装置を有する可動機械制御システムにおいて、非常停止の原因が、非常停止SWの操作によるものか、回路の断線によるものかを容易に確認できない。
【解決手段】
並列回路部Kは、検出器32が教示操作装置50の接続を検出したときに閉成する半導体スイッチ41とコンデンサCの直列回路に対して並列に接続されたメーク接点RY1aを備える。パルス信号生成回路42は並列回路部Kに対して「H」信号、及びパルス信号を印加する。判定回路46は、「H」信号、及びパルス信号(論理信号)が印加された状態で並列回路部Kから出力される信号の論理状態に基づいて、ロボットRの非常停止が、並列回路部Kの断線によるものか、非常停止スイッチ52の操作によるものかを判定する。
(もっと読む)
ロボットシステム
【課題】有線型の教示装置を引き続き使用しつつ無線通信機能を実現して導入コストを抑制できるとともに、ケーブルの取り回しの煩雑さを解消し、なおかつ作業者に無線化に伴う負担を強いることがないロボットシステムを提供する。
【解決手段】
ロボット1と、ロボット1の教示や操作に用いる教示装置3と、ロボット1および教示装置3と接続されてロボット1を制御するロボット制御装置2とを備え、教示装置3は、教示装置3とは別体であって、ケーブル41を通じて教示装置3に接続される無線化装置4を介してロボット制御装置2との間で無線通信を行う。
(もっと読む)
可動機械制御装置及び可動機械制御システム
【課題】
操作装置と可動機械制御装置とを非接続状態としても可動機械を稼働させる場合において、接続状態に戻す際に、非常停止機能の安全性を確認するために可動機械を停止する必要があった。
【解決手段】
半導体スイッチ34,34Aは、教示操作装置50が非接続状態において、オン作動すると、リレーRY1,RY3を励磁して非常停止スイッチ回路SC1,SC2が外されたことによるロボットRの停止を無効化する。診断回路40,40Aは、半導体スイッチ34,34Aがオン作動している期間に、メーク接点RY1a,RY3aがオフ作動しない範囲で半導体スイッチ34,34Aの診断を行う。教示操作装置50を接続状態に戻す際に可動機械を停止することなく非常停止機能の安全性を診断することができる。
(もっと読む)
移設検出システム
【課題】複数の機械をまとめて管理できる移設検出システムを提供する。
【解決手段】移設検出システム200では、数値制御装置1Aの固有IDを移設検出装置20に登録すると、移設検出装置20に接続する他の移設検出装置30,40にも記憶できる。数値制御装置1Aの起動時に、移設検出装置20〜40に登録した固有IDと、数値制御装置1Aの固有IDとが一致しない場合、数値制御装置1Aは起動しない。従って、移設検出装置に不正に接続する数値制御装置の使用を防止でき、かつ複数の数値制御装置をまとめて管理できる。
(もっと読む)
移設検出システム
【課題】機械の電源の状態に関わらず、電力を安定して利用できる移設検出システムを提供する。
【解決手段】移設検出装置20は交流電源35からの電源を使用する。異常電圧検出回路26がAC/DC変換機32の出力電圧の異常を検出した場合、スイッチ41をオフし、スイッチ42をオンすることで、数値制御装置1Aの交流電源16からの電力供給を利用する。交流電源35,16の何れも使用できない場合、スイッチ42をオフし、スイッチ43をオンすることで、バッテリ28からの電力供給を利用できる。従って、交流電源35,16の状態に関わらず、電力を安定して利用できる。
(もっと読む)
移設検出システム
【課題】一定範囲内での機械の移動を許容しつつも機械の移設を検出できる移設検出システムを提供する。
【解決手段】移設検出装置20に対して数値制御装置1A〜1Cを配線11A〜11Cで接続する。数値制御装置1A〜1Cは、配線11A〜11Cが届く範囲内であれば移動できる。移設検出装置20には、数値制御装置1A〜1Cの固有IDを記憶しておく。数値制御装置1A〜1Cの起動時に自身の固有IDが移設検出装置20に記憶されていなければその数値制御装置の起動を禁止する。
(もっと読む)
1 - 20 / 81
[ Back to top ]