
Fターム[3C269MN38]の内容
数値制御 (19,287) | 安全、監視、試験、診断、異常検出 (2,108) | 検出の方法 (1,318) | 複数の信号の合理性判断を行うもの (26)
Fターム[3C269MN38]に分類される特許
1 - 20 / 26
ロボットの故障検出方法、ロボット
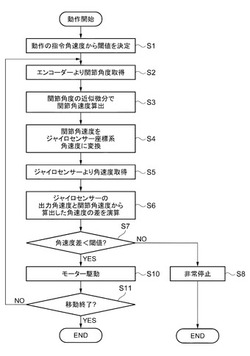
【課題】ロボットの故障検出方法を提供する。
【解決手段】ロボット1の故障検出方法は、関節J1〜J6と、これら関節に連結されるアーム13〜18と、関節J1〜J6それぞれの回転角度を検出するエンコーダー40と、アームのいずれかに取り付けられたジャイロセンサー30と、を有するロボットの故障検出方法であって、エンコーダー40またはジャイロセンサー30の異常を判定する閾値を決定する工程と、エンコーダー40によって関節角度を取得する工程と、関節角度を近似微分して関節角速度を算出する工程と、関節角速度をジャイロセンサー位置の座標系角速度に変換する工程と、ジャイロセンサーによって角速度を取得する工程と、ジャイロセンサーにより取得した角速度と座標系角速度との角速度差、または角速度比を演算する工程と、角速度差、または角速度比と、閾値とを比較する工程と、を含む。
(もっと読む)
工作機械の移設検出装置

【課題】当初の設置場所からの不適切な移設による機械の精度低下、機能低下、寿命低下などを防止すると共に、機械の移設先や移設履歴を知ることもできる工作機械の移設検出装置を提供する。
【解決手段】工作機械又はNC装置のフレームに掛かる荷重の変化を、フレームの歪の変化として検出する歪検出手段と、検出した歪の変化量が、予め定められたしきい値を超えた場合に工作機械の移設が行われた旨の移設判定を行う判定手段と、移設判定を記憶する記憶手段と、NC装置に工作機械の起動指令が与えられた時に前記記憶手段の内容を読取ることができない場合又は記憶手段が移設判定を記憶している場合に、NC装置に動作制限信号を出力する制限情報出力手段と、動作制限信号に基づく動作制限を解除するためのリセット信号を出力すると共に記憶手段の記憶内容を初期化するリセット手段とを備えている。
(もっと読む)
駆動軸共有装置および駆動軸共有方法
【課題】専用の制御装置を用いることなく、1つの共有駆動軸を複数の制御装置によって駆動制御することができ、構造が簡単であるとともに、低コストで実現することが可能な、駆動軸共有装置および駆動軸共有方法を提供する。
【解決手段】駆動軸共有装置10は、共有駆動軸20と、共有駆動軸20に連結され、共有駆動軸20を駆動する第1の駆動装置31および第2の駆動装置32とを備えている。第1の駆動装置31および第2の駆動装置32は、第1の制御装置40および第2の制御装置50によってそれぞれ制御される。第1の制御装置40は、第2の駆動装置32によって共有駆動軸20が駆動されていないとき、第1の駆動装置31により共有駆動軸20を排他的に駆動する。第2の制御装置50は、第1の駆動装置31によって共有駆動軸20が駆動されていないとき、第2の駆動装置32により共有駆動軸20を排他的に駆動する。
(もっと読む)
ロボットのコントローラ
【課題】ロボットのコントローラにおいて、特別なハードウェアを追加することを抑制しつつ、被検出対象が異常であることをより確実に検出する。
【解決手段】ロボットのコントローラ20は、メイン制御基板21及び第1サブ制御基板22を備える。制御基板21,22の各FPGA31は、所定速度でカウントを行うタイムカウンタTCを有し、タイムカウンタTCの値に基づいて所定規則で1ビットの参照値及び信号値POUTをそれぞれ算出し、タイムカウンタTCの値が所定値になった時に、1ビットの信号値POUTの入力及び1ビットの信号値POUTの出力をそれぞれ行う。制御基板21のFPGA31は、信号値POUTが参照値と一致しないことを条件として異常であることを検出する。第1CPU34は、上記2つのタイムカウンタTCの値を一致させた後に、制御基板21のFPGA31に異常の検出を開始させる。
(もっと読む)
ロボット制御装置
【課題】
手動操作座標系を自動的に切り換えても、手動操作座標系が切り換わったことを作業者が本当に認識しない限り、意図しない方向へロボットを手動操作により移動させてしまう可能性がある。
【解決手段】
ロボット制御装置RCは、複数のユーザ座標系を表示装置30に表示させることにより、表示された複数のユーザ座標系の中からいずれか1のユーザ座標系の選択を促すCPUを備える。CPUは、自動選択された座標系をティーチペンダントTPの表示装置30に表示するようにする。さらに、手動により選択された座標系と、自動選択された座標系とが一致した場合のみ、手動操作座標系の切り替え制御を行う。自動選択された座標系と作業者が意図している座標系とが相違することがなく、安全性を高めることができる。
(もっと読む)
数値制御装置、制御プログラム及び記憶媒体
【課題】複数の操作パネルの表示を消灯した場合であっても、作業者が操作可能である操作パネルを探す必要がなく、作業効率の低下を防ぐことができる数値制御装置、制御プログラム及び記憶媒体を提供する。
【解決手段】CPUは、サブパネルの操作が有効であるときに、作業者によるサブパネルの操作がない時間が所定時間以上であるか否か判断する(S50)。作業者によるサブパネルの操作がない時間が所定時間以上であると判断した場合、CPUはメインパネル及びサブパネルのディスプレイを消灯する(S60)。CPUは、メインパネル及びサブパネルのディスプレイを消灯した場合に、サブパネルの操作を無効に切り替え、メインパネルの操作を有効にする(S70)。
(もっと読む)
ロボット制御システム
【課題】
1台の可搬式操作部を、複数のコントローラにつなぎ換えて使用する場合、操作者のミスにより意図せぬロボットと接続してしまい、意図せぬロボットを操作してしまうことを防止する。
【解決手段】
ロボット制御システムは、ティーチペンダント10と無線通信で情報を送受信する複数のコントローラ20Aと、コントローラ20A毎に接続されるとともに該コントローラ20Aにより制御可能なロボットを備える。コントローラ20Aは、ティーチペンダント10と接続関係が構築された際、ロボットモータを制御するサーボドライバ27に電力供給遮断を行うマグネットスイッチMSに対して電力遮断指令を付与するマグネットスイッチ制ラダー部60を備える。マグネットスイッチMSは、電力遮断指令に基づいてサーボドライバ27への電力を遮断する。
(もっと読む)
機械の操作装置
【課題】
ティーチペンダントの非常停止スイッチが有効に機能していない状態にも関わらず、有効に機能しているものとして報知することがある。
【解決手段】
TP(ティーチペンダント)100は非常停止SW110と、非常停止SW110の状態に応じて発光する発光体Lと、非常停止SW110の接点状態を監視し、接点状態に応じて光源制御信号を出力する第1CPU120,第2CPU130を備える。光源制御回路125は発光体Lを光源制御信号に基づいて制御する。ウオッチドッグ回路160は、第1CPU120,第2CPU130の作動状態を監視し、異常の場合に光源制御回路125に対し発光体Lの制御を禁止する。非常停止SW110が有効に機能していないにも関わらず機械を緊急停止させようとする行動を回避させることができる。
(もっと読む)
移設検出システム
【課題】複数の機械をまとめて管理できる移設検出システムを提供する。
【解決手段】移設検出システム200では、数値制御装置1Aの固有IDを移設検出装置20に登録すると、移設検出装置20に接続する他の移設検出装置30,40にも記憶できる。数値制御装置1Aの起動時に、移設検出装置20〜40に登録した固有IDと、数値制御装置1Aの固有IDとが一致しない場合、数値制御装置1Aは起動しない。従って、移設検出装置に不正に接続する数値制御装置の使用を防止でき、かつ複数の数値制御装置をまとめて管理できる。
(もっと読む)
移設検知機能付き産業機械
【課題】 不正な移設のための移動が生じたか否かを適切に判定することができ、不正に対応した処置が行える移設検知機能付き産業機械を提供する。
【解決手段】 工作または計測等の作業を行う作業器具を有する機械本体と、この機械本体または機械本体周囲の環境変化を検知する環境変化検知手段と、不正移設判定手段7と、処理手段とを備える。不正移設判定手段7は、環境変化検知手段の検知した環境変化後の状態が継続する時間の長さに基づき前記機械本体の不正な移設と判定する。処理手段は、不正な移設であるとの判定結果によって前記作業器具による作業を不能とする。
(もっと読む)
工作機械、工作機械の温度測定部の数及び配置の決定方法及びプログラム
【課題】工作機械において熱変位量の推定を、逆解析により求めた熱源の同定方法によって精度良く熱変位の補正が可能である熱変位補正方法を提供する。
【解決手段】複雑な構造の駆動系の熱変位誤差を補正と、熱変位量の推定をする方法にあたって、まず、構造体に設置されている温度センサのうち有用性の高いものを温度測定部として選択し、次に、被測定構造体の熱源領域の設定を行い、被測定構造体の温度上昇量を行い、次いで逆解析により熱源領域の熱流入量を測定し、熱流入量を変数とする熱変位の補正式の確立が行われる。続いて各熱源への熱流入量を考慮した熱変位量の推定を行い、熱流入量に基づく熱変位補正が可能になる。
(もっと読む)
加工装置
【課題】加工工具の折損を自動検出でき、加工後の加工工具に折損がない場合、従来のように操作者により起動ボタンを押下する必要をなくして作業効率を向上させる。
【解決手段】昇降する加工工具5を検出する工具検出スイッチ3をテーブル1上に設けると共に、この工具検出スイッチ3がオンすることでオン、オフ信号を出力するスイッチ回路を有する自動起動操作ボックス11を設け、1加工工具による加工終了後、テーブル1の移動により工具検出スイッチ3を検出位置に位置づけて加工工具5を下降させ、その際工具検出スイッチ3が押下されたか否かにより加工工具5が折損しているか否かを判断すると共に、加工工具5が折損していないことで工具検出スイッチ3が押下されることにより前記スイッチ回路からオン、オフ信号が出力された場合、前記起動スイッチ17のオン、オフが行われなくとも自動的に次の加工に移るように制御する。
(もっと読む)
複数のセンサの信号に基づいて機械の異常判定を行う機能を備えた数値制御装置
【課題】数値制御装置の内部情報と複数のセンサ信号とを用い、より確実に機械の異常を判定することが可能な異常判定を行う機能を備えた数値制御装置を提供すること。
【解決手段】機械30の各部に配置された複数のセンサにより検知された振動センサからの信号、温度センサからの信号、および湿度センサからの信号は、センサ信号受信回路24に入力すし、AD変換回路23によりアナログ信号をデジタル信号に変換後、ピークホールド回路22、通信回路21を介して数値制御装置10に入力する。数値制御装置10のマイクロプロセッサ14は、複数のセンサ情報(振動情報、温度情報、湿度情報)と、数値制御装置内部情報15aを取り込み、異常判定処理、異常通知処理、異常状態を数値制御装置10が備えた表示装置に表示したり、機械30を停止するためのラダー出力や、異常状態の判断結果を数値制御装置10のメモリに格納する処理を行う。
(もっと読む)
ロボット、及びオートゼロイング方法
【課題】作業員の手を介することなく自動的に基準姿勢を原点姿勢に調整することができ、また基準姿勢を原点姿勢に精度よく調整することができるロボットを提供する。
【解決手段】搬送ロボット22は、角変位可能に連結された連結部材27,28,29を備え、調整可能な基準姿勢を基準として各連結部材27,28,29の変位を制御する。基台23にはレーザセンサ38を備える。レーザセンサ38は、予め定められた方向にレーザ光を投光し、且つ原点姿勢と一致する第1の検出姿勢に第1の連結部材27が配置されると、投光したレーザ光がリフレクタ41で反射された反射光を受光するようになっている。制御部はレーザ光がリフレクタで反射しレーザセンサ38で受光するように第1の連結部材27を角変位させる。受光した時の第1の連結部材27の姿勢を原点姿勢とする。連結部材28,29についても、リフレクタ42,43を用いて同様に原点を調整する。
(もっと読む)
回転角度判定システム
【課題】NC工作機械の信頼性をあげることができる回転角度判定システムを提供する。
【解決手段】回転角度判定システムSは、NC機械の機械制御部200と、NC機械角度検出部20に設けられている角度検出用のロータリスケール22と同軸に設置されたロータリスケール180と、ロータリスケール180の計測信号を角度値に変換する並列系統シーケンサ部185と、並列系統シーケンサ部185からの角度値と、ワークの加工情報に基づき算出した角度値の合致判定を行う回転角度判定装置100とを備える。回転角度判定装置100は、機械制御部200から回転角度判定要求を受理すると、並列系統シーケンサ部185から角度値を受信し、受信した角度値と、予め算出した角度値との角度差が、加工情報で与えられている公差以内であるか否かを判定し、判定結果を機械制御部200に送信することを特徴とする。
(もっと読む)
ロボット制御システム及びコントローラ
【課題】教示時において通信エラーが発生した場合でも、ロボット制御を行うコントローラ側の反応の遅れや、或いは操作不可の状態が発生することがなく、安全性を高めることができるネットワーク対応のロボット制御システムを提供する。
【解決手段】
ティーチペンダント10は、教示操作に使用される複数の優先キー15の各キー状態に応じて、優先キー15の入力順に前記各キー状態のパケットデータを複数作成して定期周期毎に連番で送信する安全送信部12を備える。コントローラ30は、通信部33及び安全受信部32が受信した優先キー15に関するパケットデータが定期周期毎に連番で受信した場合にそのパケットデータに応じたロボット制御を行い、定期周期毎に連番で受信しなかった場合には、ロボットRを停止する。
(もっと読む)
アラーム情報を表示する機能を有する数値制御装置
【課題】アラームになった要因を数値制御装置に記憶したデータを使用して表示装置に具体的に表示するようにし、アラームが発生した際に顧客(ユーザ)が問題を解決するのに必要な工数を削減すること。
【解決手段】プログラムの実行中のアラーム発生時に実行していたプログラム番号、プログラムブロックの指令内容、アラームの判定に使われたデータを、数値制御装置内に記憶するアラーム情報記憶手段Gと、各アラームに対応するアラームの判定内容を記載したアラーム要因メッセージの雛形を記憶しているアラーム要因メッセージのアラーム要因メッセージ雛形記憶手段Iと、アラーム情報記憶手段Gに記憶されたアラーム情報を、対応する前記アラーム要因メッセージの雛形に組み入れる組み入れ手段Hと、組み入れ手段Hによって完成されたアラーム要因メッセージの表示を行う表示手段(J、K)と、を備えたアラーム情報を表示する機能を有する数値制御装置。
(もっと読む)
安全確保装置
【課題】冗長化された複数の設定部を有する安全確保装置における設定作業の効率化を図る。
【解決手段】動作モードと設定モードとを切り替えるモード切替部26によって、設定モードを選択し、設定部の組の内の特定の設定部としての第1の設定部23−1に対して設定を行うことにより、その設定内容、第1,第2の逆起電力入力部11,12および接点入力部13の入力に基づいて、安全信号と同様の補助信号を出力するようにしており、これによって、冗長化されている二つの第1,第2の設定部23−1,23−2に対して同じ設定を行うことなく、第1の設定部23−1のみの設定を行なえばよく、また、補助信号を用いて、設定内容が適切であるか否かを確認して設定を調整することができる
(もっと読む)
移設判断機能付き工作機械
【課題】移設判断機能付き工作機械を提供すること。
【解決手段】工作機械の可動部の移動方向を記憶する移動方向記憶手段と、機械座標位置が予め設定範囲にある場合に電源遮断時の機械座標位置と移動方向記憶手段に記憶されている電源遮断前移動方向とを記憶する記憶手段と、電源再度投後、可動部が移動する前の機械座標位置と最初に可動部が移動した際の可動部の電源投入後移動方向とを取得し、電源遮断時機械座標位置と電源遮断前移動方向と電源投入時機械座標位置と電源投入後移動方向とを比較し、電源遮断前と反対方向に移動したか否かを判断する移動判別手段と、該移動判別手段が電源遮断前と反対方向に移動したと判断した場合、工作機械が電源遮断時に設置された場所から移設されたと判断する移設判断手段、を有する工作機械。
(もっと読む)
産業用ロボットおよびそのソフトウエア更新方法。
【課題】 制御装置内の各基板のソフトウエア格納領域の容量を増大させることなく、操作者が整合性判断が必要としたときに整合性判断部を備えた着脱容易な2次記憶装置をシステム基板に接続することで自動でソフトウエアの更新ができる産業用ロボットを提供する。
【解決手段】制御装置内に、CPU11とROM12とRAM13とを備えてシステム全体を制御するシステム基板10と、サーボ部を制御するサーボ基板20を有し、2次記憶装置17とティーチペンダント30が接続可能な産業用ロボットにおいて、システム基板10、サーボ基板20、ティーチペンダント30の各ソフトウエア間の整合性判断を行なう整合性判断ソフト18を2次記憶装置17内に備え、CPU11は2次記憶装置17内に整合性判断ソフト18がある場合にのみ整合性判断を行なうようにした。
(もっと読む)
1 - 20 / 26
[ Back to top ]