
Fターム[3C269QE08]の内容
数値制御 (19,287) | 表示内容、監視、記録内容 (1,309) | 図形を用いて表示するもの (564) | 工具、作業具の形状を表示 (53)
Fターム[3C269QE08]に分類される特許
1 - 20 / 53
ロボットプログラミング装置

【課題】オフラインロボットプログラミング装置で作業者の修正作業を排除する。
【解決手段】ロボットプログラミング装置(10)は、ワーク(14)の三次元モデル上で加工線(41)を指定する加工線指定部(21)と、加工線に基づいて生成される教示点の動作形式等を指定する動作形式指定部(22)と、加工線および動作形式等に基づいてロボット(12)のプログラムを生成するプログラム生成部(23)と、ワークに直接接触するツールの一部分以外のツール非加工部位を干渉対象として指定する干渉対象指定部(24)と、教示点におけるロボット等とワーク等との干渉を検出する干渉検出部(25)と、干渉時にロボットの位置からツール先端点を並進移動することにより、ロボット等とワーク等とが干渉しない非干渉位置を検索する非干渉位置検索部(26)と、検索結果に基づいて教示点の位置を修正する修正部(27)とを含む。
(もっと読む)
工作物の機械加工のシミュレーション

【課題】切削部および非切削部を有する切削ツールによる工作物の機械加工をシミュレートするための、コンピュータ実施方法を提供する。
【解決手段】工作物および切削ツールの軌道を表すモデル化されたボリュームを提供するステップ(S10)と、切削ツールの衝突掃引を決定するステップ(S20)であって、衝突掃引は、切削ツールが軌道をたどる場合に、切削ツールの非切削前部によって掃引されるボリュームを表す、ステップ(S20)と、決定するステップ(S20)に従って工作物との衝突をテストするステップ(S30)と、を含む方法により、切削ツールによる工作物の機械加工のシミュレーションを向上させる。
(もっと読む)
切断製品の吸着搬送格納方法及び装置
【課題】板状のワークに切断加工された複数のパーツを同時に吸着搬送して、個別の製品パレットに各パーツをそれぞれ格納することにより、板材加工機における切断加工の停止時間をより短時間にすることのできる方法及び装置を提供する。
【解決手段】複数の吸着具を備えた吸着搬送手段の吸着搬送装置によって、切断加工された複数の製品を吸着する工程と、前記吸着搬送装置によって吸着された各製品を各製品に対応した製品格納部へ搬送する工程と、各製品に対応した製品格納部へ各製品を搬送する毎に、当該製品格納部に対応した製品のみの吸着を解除して当該製品を当該製品格納部に格納する工程、の各工程を備え、前記吸着搬送装置による複数の製品の吸着は、1枚のワークに対する複数の製品の切断加工が全て終了した後に、又は、1枚のワークにおける所定領域内の複数の製品の切断加工が終了し、前記所定領域外の製品の切断加工の継続時に、前記所定領域内の複数の同時吸着を行う。
(もっと読む)
工具管理システム
【課題】工具の情報の入力作業が簡単で、誤入力、入力漏れのおそれが小さく、入力後の情報の確認作業が簡単な工具管理システムを提供することを課題とする。
【解決手段】工具管理システム2は、単一の画面23、24中に単一の工具T1〜T7の像230a、240aと、工具T1〜T7の所定の部位に関する情報項目230b、240bと、を表示する画面21を有する表示装置20を備える。作業者は、工具T1〜T7の像230a、240aおよび情報項目230b、240bを見ながら、情報を入力することができる。このため、工具T1〜T7の情報の入力作業が簡単である。また、誤入力、入力漏れのおそれが小さい。また、入力後の情報の確認作業が簡単である。
(もっと読む)
工作機械における工作物の機械加工シーケンスシミュレーション装置
【課題】本発明は、工作機械の動作シーケンスのシミュレーションを可能にしさらにシミュレーションを改善した工作機械において、シーケンスのシミュレーション装置の提供を目的とする。
【解決手段】本発明は、工作機械における工作物を機械加工するためのシーケンスをシミュレーションするための装置に関し、全体的なシミュレーションアプローチを特徴とする。PLC制御手段723とPLCシーケンスシミュレーション手段725は、工作機械のPLC動作シーケンスをシミュレーションを支援し、これにより、全ての実質的な態様において、工作機械のリアルなシミュレーションを可能にする。その結果、特に訓練や機械稼働時間の判定中において、非常に有益である。
(もっと読む)
回転工具の実切削距離算出方法、実切削距離算出のためのコンピュータプログラム、切削力予測方法及び工具経路修正装置
【課題】大型の被削物であっても実切削距離を高精度に算出することができるようにする。
【解決手段】被削物を切削する回転工具の実切削距離を算出する回転工具の実切削距離算出方法であって、工具による加工前の被削物の形状、工具の切れ刃形状、及び工具の送りによる移動経路の情報を含む所定データを入力するデータ入力ステップと、データ入力ステップの後、工具の切れ刃を仮想的に複数の微小な刃に分割して仮想の微小切れ刃を生成する微小切れ刃生成ステップC1と、仮想の微小切れ刃が所定の微小角度回転する毎に、被削物を切削しているか否か判定し、切削していると判定されたときには、微小角度の回転によって移動する上記微小切れ刃の移動距離を求め、この移動距離を切削加工開始時点から順次積算して実切削距離を得る実切削距離算出ステップC4〜C8とを含むことを特徴とするものである。
(もっと読む)
工具通過領域モデリング方法
【課題】工具通過領域の形状の定義不能状態を極力回避可能とし、円弧部を含む工具通過領域のモデリング時間の短縮を可能とする。
【解決手段】工具通過領域モデリング方法において、工具経路を直線部と円弧部に分割する(301)。円弧部については、工具経路の内側と外側とに分割し、各々工具経路に沿って工具断面形状をスイープして工具通過領域を作成(303〜305)した後、各工具通過領域を連結して円弧部の工具通過領域を作成する(307)。円弧部について工具経路の内側と外側とに分割して円弧部の工具通過領域を作成する(303〜305)ことで、円弧部における工具通過領域の形状の定義不能状態を極力回避する。
(もっと読む)
工作機械の工具軌跡表示装置
【課題】3次元形状を直感的に認識可能な工作機械の軌跡表示装置を提供する。
【解決手段】数値制御装置20は、指令位置演算部21により求められた指令位置に基づいて、各軸モータを制御する駆動軸制御部22とを備え、位置検出装置によって検出された各軸の実位置情報がフィードバックされる。軌跡表示装置30は、駆動軸制御部22から離散的な時刻における実位置データを同時に時系列データとして取得する実位置データ取得部32、可動部3次元軌跡計算部34、可動部3次元軌跡計算部34で求めた可動部の3次元軌跡から、立体視用左眼画像データを計算する左眼用画像計算部36,立体視用左眼画像データを計算する右眼用画像計算部38、左眼用画像計算部36からの立体視用左眼画像データ,右眼用画像計算部38からの立体視用左眼画像データを用いて、画像を対応する左右のそれぞれの眼から見えるように表示する立体視用画像表示部43を備える。
(もっと読む)
加工パスの生成方法及び加工方法
【課題】製品設計の3次元CADモデル(以下3D−CADと称する)から,割り落とすことが可能な形状を自動判断し,その割り落とす加工方法の加工パスを自動生成し,製品の加工時間を短縮し,工具摩耗を低減できるようにする。
【解決手段】素材の一部を切削により削除する加工パスを生成する加工パス生成方法を、設計情報を用いて素材の削除する領域を素材に対して第1の方向から切削加工する第1の加工パスを作成する第1の加工パス生成工程と、設計情報を用いて素材の削除する領域を素材に対して第2の方向から第1の方向の側の面よりも下の部分を切削加工する第2の加工パスを作成する第2の加工パス生成工程とを有して構成した。
(もっと読む)
加工面評価装置、加工面評価方法及びプログラム
【課題】短時間に加工面の評価を行うことができる加工面評価装置等を提供する。
【解決手段】制御部3は、入力部13から面法線ベクトル21を含む加工形状データ27を入力し(S11)、工具の形状や加工パラメータを設定する(S12)。次に、画像演算部5は、カスプデータ26を算出し、算出結果をカスプデータベース20に記憶する(S13)。次に、制御部3は、加工形状データ27、工具の形状や加工パラメータに基づいて、カスプデータベース20を検索してカスプデータ26を取得する(S14)。次に、画像演算部5は、カスプデータ26をテクスチャデータに変換し(S15)、テクスチャデータを加工形状データ27の加工面にマッピングして、全面カスプを生成し(S16)、全面カスプ画像を表示部7に表示する(S17)。
(もっと読む)
数値制御マシンツールのための予測制御及び仮想表示システム
本システムは、ルール(T)用ツールホルダ(2)、ツール(T)による工作対象ワークピース(W)用キャリア(3)、及び、前記ツール(T)と前記ワークピース(W)との間に制御された各軸方向の相対変位をもたらすべく関連ドライバ(D1、…、DN)によって制御可能な複数のアクチュエータデバイス(A1、…、AN)を含むマシンツール(M)のための制御及び仮想表示(1)を行う。制御システム(1)は駆動手段(D1、…、DN)に接続されて、製造される前記ワークピース(W)の特徴及びツール(T)の特徴に応じた所定の工作プログラムを実装するのに適した数値制御器(NC)であって、工作プログラムに基づいて、軸方向のツール(T)の位置であって関連するアクチュエータデバイス(A1、…、AN)の作動によって達成される位置を画定する目標座標を計算するのに適した数値制御器(NC)と、画像表示手段(ID)と、計算された目標座標の値を受け取るべく数値制御器(NC)と協働し及び/又はこれに接続された処理システム(P)とを含み、当該システムは、マシン(M)の、ワークピース(W)の、及びツール(T)の目標座標に基づいて及び格納された数学モデルに基づいて、工作が進行中に、予め設定された「予測時間窓」においてワークピース(W)に及びマシン(M)に予め選択された未来の瞬間まで採用される位置の仮想2次元表現を画像表示手段(ID)上に作るのに適した画像データを生成するべく構成される。  (もっと読む)
(もっと読む)
加工シミュレーション装置及び方法
【課題】切削加工シミュレーションにおいて、加工傷の発生状況とその発生メカニズムとに関する定量的な分析を支援する各種の特性量をより直感的に把握できる加工シミュレーション装置及び方法を得ること。
【解決手段】工具の種別及び形状を示す工具データ6及び工具の移動軌跡を示す工具移動軌跡データ7に基づいて切削加工をシミュレートして被加工物の形状を示す被加工物形状データ8を生成する切削形状処理部2と、切削加工の過程における被加工物の加工面上の着目点について、着目点の創成に関与した特性量を、被加工物形状データ8、工具データ6及び工具移動軌跡データ7に基づいて算出する工具移動特性量算出部4と、被加工物形状データ8に基づいて生成された、予め定められた視線方向に沿った被加工物の投影イメージに、特性量を重畳してディスプレイデバイス9に表示させる切削形状表示部3とを有する。
(もっと読む)
切削装置、切削方法、プログラムおよびコンピューター読み取り可能な記録媒体
【課題】簡単な切削を手軽に行うことができるようにした。
【解決手段】ツールと被加工物との相対的な位置関係を3次元で変化するとともにツールにより被加工物に対して切削加工を行う切削装置において、予め定められた複数の切削加工から所定の切削加工を設定する第1設定手段と、予め定められた複数の切削加工領域の形状から所定の設定する第2設定手段と、第2設定手段により設定された切削加工領域の形状の切削加工位置を設定する第3設定手段と、切削加工に使用するツールを設定する第4設定手段と、切削加工によって切削処理される被加工物の材料を設定する第5設定手段と、第1設定手段と第4設定手段と第5設定手段とによる設定に基づいて切削条件を算出して設定する第6設定手段と、第1乃至第6設定手段よる設定に基づいて切削データを生成する生成手段とを有し、生成手段により生成された切削データに基づいて切削加工を行うようにしたものである。
(もっと読む)
数値制御装置
【課題】ショートカット機能の使い勝手を向上させて、パラメータの閲覧又は編集を能率的に行う。
【解決手段】登録ショートカット情報に動作情報が設定されている場合(S12;Yes)、CPUは工作機械の動作情報を取得し、取得した動作情報に基づいて登録ショートカット情報を書き換える(S13)。登録ショートカット情報に直前操作画面情報が設定されている場合(S14;Yes)、CPUは、直前操作画面情報を取得し、取得した直前操作画面情報に基づき登録ショートカット情報を書き換える(S15)。S16においてCPUは、ショートカット先の画面の付属情報を取得し、取得した付属情報に基づき登録ショートカット情報を書き換える。S19においてCPUは、ショートカット先の画面の画面遷移情報を登録ショートカット情報に置き換え、置き換えられた画面遷移情報に基づいて画面を表示すると共に、ショートカット画面を消去する。
(もっと読む)
機械加工シミュレーションを最適化するためのシステム及び方法
本発明の実施の形態は、工作物のボリュームから、掃引されたボリュームのセットを除去することによって実施される工作物の機械加工のシミュレーションを最適化する方法で、ボリュームはセルのセットに分割され、各セルにこのセルと交差する掃引されたボリュームのサブセットを表す距離フィールドのサブセットを関連付けるステップであって、掃引されたボリュームのサブセットの少なくとも一部はセルの複合サーフェイスを形成する関連付けるステップと、セルに少なくとも1つの方向からこのセルに入射する光線のセットを当てるステップと、距離フィールドのサブセットの或る距離フィールドを選択して、セルと関連付けられた最適サブセットに含めるステップであって、距離フィールドによって表される掃引されたボリュームの境界は、複合サーフェイス上に位置する交点において少なくとも1つの光線と交差する選択して含めるステップとを含む方法である。 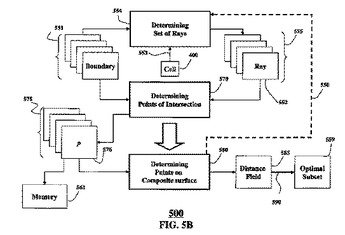 (もっと読む)
(もっと読む)
切削工具の加工位置補正装置およびその加工位置補正方法
【課題】画像処理での面粗度に基づき切削工具の加工位置を精度良く補正し得る切削工具の加工位置補正装置及びその加工位置補正方法を提供する。
【解決手段】画像処理(ステップ100)のデータに基づいてCPUはノーズ半径を演算し、且つ演算されたノーズ半径及びバイトの送り量を理論面粗度の計算式(送り量/(8×刃先のノーズ))に代入することにより、理論面粗度を演算する(ステップ102)。この演算された理論面粗度をRAMに記録し(ステップ104)、フィードバックして補償処理を行なう(ステップ106)。即ち、画像処理データに基づいてノーズ半径を演算するので、手作業でノーズ半径を計算すること無く、計算ミス及び入力ミスが防止される。従って、CPUは上述した理論面粗度に基づき切削工具の加工位置を補正し得るので、旋盤に係る補正処理が簡易かつ正確となる。
(もっと読む)
工具軌跡表示機能を有する数値制御装置
【課題】数値制御装置が管理している工具径補正ベクトルを用いることによって、実加工点の軌跡を表示する機能を備えた数値制御装置を提供すること。
【解決手段】指令部11は、加工プログラムのブロックを解析し、工具径補正ベクトルを計算し、駆動軸制御部12に工具径補正ベクトル分を補正した移動指令および各軸モータ21x,21y,21z,21A,21Bからの位置フィードバック情報に基づいて、工作機械20の工具を加工プログラムの加工経路に従って移動させる。工具径補正ベクトル取得部13は、指令部11において計算された工具径補正ベクトルのデータを取得し、実加工点算出部16へ送る。実加工点算出部16は、工具径補正ベクトルのデータ、および、工具中心座標値のデータを用いて、実加工点の位置のデータを算出し、実加工点表示部17は、実加工点のデータを元に実加工点軌跡を表示する。
(もっと読む)
加工状況監視装置
【課題】複数のカメラの中から選択されたカメラにより生成される画像を通してオペレータがワークの加工状況を監視することができる加工状況監視装置を提供する。
【解決手段】加工状況監視装置1は、制御装置60から得られる動作指令を基に3次元モデルデータを更新するモデルデータ更新部17、カメラパラメータと、更新されたモデルデータと、制御装置60から得られる工具の位置情報とを基に、複数のカメラ11,12,13,14、工具及びワークの位置関係を予め設定された時間毎に認識する位置関係認識部18、認識された位置関係を基に、ワークにより工具の先端が隠れない2次元画像データを生成可能なカメラ11,12,13,14を選択するカメラ選択部20、選択されたカメラ11,12,13,14により生成される2次元画像データを画面表示装置66に表示させるカメラ切換部21を備える。
(もっと読む)
ロボットのオフライン教示方法
【課題】ティーチングデータの作成を容易とするロボットのオフライン教示方法を提供する。
【解決手段】ロボットのオフライン教示方法は、複数の仮想教示点を設定するステップ(STEP2)、始点と終点とを含む一部の仮想教示点において仮想ツールの姿勢を設定するステップ(STEP3〜7)、一部の仮想教示点間の補間動作を実行するステップ(STEP8)、補間動作実行時の仮想ツールの位置及び姿勢を所定間隔毎に補間動作点として記憶するステップ(STEP9)、他の仮想教示点毎に、記憶された補間動作点のうち所定の選択基準を満たす補間動作点を選択するステップ(STEP11,12)、他の仮想教示点毎に、選択された補間動作点の姿勢データを読込み、読み込んだ姿勢データを他の仮想教示点の姿勢データとして記憶させるステップ(STEP13〜16)を有する。
(もっと読む)
ネスティング装置
【課題】 隣接辺共通化形態と間隔付与形態との利点を生かし、欠点を少なくして、歩留りの向上、加工時間短縮、加工の安定性が得られるネスティングが行えるようにする。
【解決手段】 ネスティングを行う設定配置規則Rとして、隣接辺共通化規則Raと、間隔付与配置規則Rbと、上記両規則Ra,Rbを条件によって使い分ける併用規則Rcとを設ける。隣接辺共通化規則Raは、隣り合って配置される部品図形Mの隣接辺につき、一方の部品図形Mにおける工具表示部の外周を示す辺に、他方の部品図形Mにおける部品板材表示部Mtの外周を示す辺を重ねる。間隔付与配置規則Rbは、隣り合って配置される部品図形Mの間に間隔を開ける。
(もっと読む)
1 - 20 / 53
[ Back to top ]