
Fターム[3D034BA03]の内容
操向リンク系及び4WS (6,986) | 操舵リンク機構の目的、機能 (526) | 操舵性能の向上 (267) | 操縦性、旋回性 (131)
Fターム[3D034BA03]の下位に属するFターム
アッカマン幾何機能 (22)
Fターム[3D034BA03]に分類される特許
1 - 20 / 109
操舵装置
【課題】簡易且つ適切に旋回モードを移行させる。
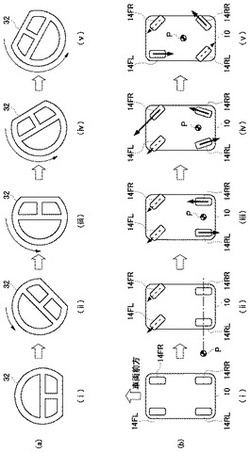
【解決手段】操舵装置において、転舵機構は、前二輪および後二輪を有する車両10における前二輪および後二輪の各々をステアリング32の操舵に基づいて転舵する。駆動機構は、前二輪および後二輪の各々を個別に駆動する。転舵機構および駆動機構は、ステアリング32の操舵量が増加する過程において、前二輪を同位相に転舵する通常旋回モードから、前二輪を同位相に転舵するとともに後二輪の旋回外輪に前進方向の駆動力を与え後二輪の旋回内輪に後進方向への駆動力を与える小回り旋回モードを介して、後二輪を逆位相に転舵する信地旋回モードに移行させる。転舵機構は、信地旋回モードにおいて、前二輪の旋回内輪を直進方向に戻すよう転舵する。駆動機構は、信地旋回モードにおいて、前二輪の旋回内輪に後進方向の駆動力を与える。
(もっと読む)
作業車

【課題】旋回操作の自由度が高く実用性が高い作業車を提供する。
【解決手段】芝刈り作業車1は、車幅方向に延びる軸線Ax1を回転中心として回転駆動されるドラム式車輪18L、18Rを有する芝刈りユニット2と、芝刈りユニット2に連結されたフレーム10と、フレーム10に設けられた操舵駆動装置11と、を備え、操舵駆動装置11は、車幅方向に配置された一対の操舵輪40L、40Rと、一対の操舵輪40L、40Rの各操舵輪を独立して転舵可能な操舵部41L、41Rと、一対の操舵輪40L、40Rを回転駆動できる車輪駆動部42L、42Rと、を備える。
(もっと読む)
車両操舵装置
【課題】操舵輪の転舵角を大角度とすることができる技術を提供する。
【解決手段】車両操舵装置1は、車両の操舵輪とステアリングシャフト14とに連結され、操舵輪をキングピン軸X周りに回動させて操舵輪を転舵させるための第1転舵部20と、操舵輪とステアリングシャフト14とに連結され、操舵輪をステアリングシャフト14の回動軸周りに回動させて第1転舵部20と共同して操舵輪を転舵させるための第2転舵部30とを備える。
(もっと読む)
車両のドライブステアアクスル装置
【課題】本発明は、簡単、かつコンパクトなギヤ系で、車両の上下方向から加わる大きな荷重でも噛み合い状態を所期に保ちながら、大操舵角性能の確保、さらには良好な車輪への動力伝達が行える車両のドライブステアアクスル装置を提供する。
【解決手段】本発明は、キングピン21の軸心周りに回転自在な中継ギヤ37を有し、キングピンの軸線を挟む車体側アクスルシャフト19および車輪側アクスルシャフト32の端部に中継ギヤと共通に噛み合う入・出力ギヤ40,41を有し、車輪側アクスルシャフトの旋回にならい、出力ギヤの中継ギヤに対する噛み合い位置をキングピン中心に可変させ、回転動力を車輪へ出力可能としたステア機構36と、入・出力ギヤと車体側アクスルシャフトおよび車輪側アクスルシャフトの端部との間に設けたユニバーサルジョイント46,47と有した構成を採用した。同構成により、ユニバーサルジョイントで、入・出力側のギヤ交差角の差異を吸収させ、入・出力ギヤと中継ギヤとを同じ交差角で噛み合せる。
(もっと読む)
車両操舵装置
【課題】操舵輪に入力される横力に対する剛性を向上させるとともに、操舵輪の転舵角を大角度とすることができる技術を提供する。
【解決手段】車両の操舵輪Wを転舵するための車両操舵装置1は、一端側が操舵輪Wの回転軸70に連結され、他端側が操舵輪Wの上方で操舵輪Wの転舵軸周りに回動するよう車体BD側に連結される操舵輪支持部材10と、操舵輪支持部材10の一端側に回動可能に連結され、車幅方向に延在する第1部材(例えばロッド22)、および車体BD側と第1部材のそれぞれに回動可能に連結される第2部材(例えばピットマンアーム24)を有する連結部20とを備える。車両操舵装置1では、操舵輪Wが転舵される際、操舵輪支持部材10および第2部材が回動し、第1部材が、転舵による操舵輪Wの接近に対して退避する方向に変位する。
(もっと読む)
自走車両
【課題】操縦操作に基づいて制御量を生成する制御ユニットと、キャスタ輪と、制御指令により互いに独立して駆動制御される第1駆動部及び第2駆動部と、第1駆動部によって走行駆動される左駆動輪及び第2駆動部によって走行駆動される右駆動輪とを備えた自走車両において熟練を要せずに傾斜面を駆動走行しながら自在に横切ることできること。
【解決手段】傾斜横切り走行時に発生する目標走行と実走行との走行方向ずれを、車両の傾斜度に基づいて、解消するようにキャスタ輪の操向角を制御する。
(もっと読む)
車両用操舵装置およびその制御方法
【課題】ステアバイワイヤシステムを有する車両用操舵装置において、旋回制動時等の走行安定性を向上させること。
【解決手段】ステアバイワイヤシステムと、ステアリングラック部材14と車輪とを連結する転舵用リンク部材と、転舵用リンク部材と並行して設置し、車体と車輪とを車両上下方向に揺動可能に連結する懸架用リンク部材と、ステアリングラック部材14を車両前後方向に移動させるラック移動手段27a、27b、27cと、ラック移動手段27a、27b、27cによるステアリングラックの移動に応じて、入力側ステアリング軸と出力側ステアリング軸との連結状態を切り替えるクラッチ27dと、を有し、ラック移動手段27a、27b、27cが、ステアリングラック部材14を、転舵用リンク部材との連結点が懸架用リンク部材に近づく方向に移動させる車両用操舵装置とした。
(もっと読む)
後輪トー角制御装置
【課題】直進走行時であっても外乱に対する直進走行性を有効に高めることのできる車両挙動制御を提供する。
【解決手段】電動パワーステアリング装置を備え、後輪5l、5rのトー角可変制御される後輪トー角可変式の自動車Vに設けられ、後輪のトー角の制御に供される後輪トー角制御装置において、ヨーレートを検出するヨーレートセンサと、横加速度を検出する横加速度センサとを備え、検出されたヨーレートと横加速度とに基づいて、外力Fpの働く位置が車体重心CGよりも前方である場合、後輪5のトー角をトーイン側に設定し、外力Fpの働く位置が車体重心CGよりも後方である場合、後輪5のトー角をトーアウト側に設定する。
(もっと読む)
キャンバシステム
【課題】クランク機構に角度検出部を取り付けるための作業を簡素化することができ、クランク角を確実に検出することができるようにする。
【解決手段】車両のボディと、複数の車輪と、所定の車輪に配設され、駆動部、回転体、及び回転体に取り付けられ、回転体の回転角度を検出する角度検出部を備えたキャンバ可変機構と、回転体が初期位置に置かれた状態で前記角度検出部によって検出される初期値Ksに基づいて、前記所定の車輪にキャンバを付与し、キャンバの付与を解除する際の角度検出部の稼動範囲を設定する稼動範囲設定処理手段と、回転体が回転させられている状態で角度検出部によって検出される現在角に基づいて、回転体の回転角度を稼動範囲に対する相対角度で算出する回転角度算出処理手段とを有する。回転体に角度検出部を取り付けるための作業を簡素化することができる。
(もっと読む)
ステアリング装置
【課題】 追加のモータを一つ備えることで、大舵角調整機能とフェールセーフ機能を同時に付加できて、追加のモータの効率的な使用が行えるステアリング装置を提供する。
【解決手段】 車台1に回転自在に支持されるサスペンションホルダ2に、このサスペンションホルダ2に対して車輪6の転舵を行わせるホルダ上転舵用支持機構5を設ける。サスペンションホルダ2と共に車輪6を転舵する第1の転舵機構7を設ける。サスペンションホルダ2に対して車輪6を転舵する第2の転舵機構8を設ける。これら各転舵機構7,8に転舵用のモータ9,10を設ける。各車輪6にインホイールモータ20を設ける。
(もっと読む)
車両用操舵装置
【課題】旋回性に優れ且つ車両姿勢が安定した車両用操舵装置を提供すること。
【解決手段】車両の幅方向Xに延びる第1の被動ラック9Aと第2の被動ラック9Bに、共通の駆動ピニオン10が噛み合う。トレッド幅変更アクチュエータ11が駆動ピニオン10を駆動すると、第1および第1の被動ラック9A,9Bが互いに反対方向に移動する。第1および第2の転舵輪3A,3Bをそれぞれ転舵する第1および第2の転舵アクチュエータ4A,4Bが、それぞれ、第1の被動ラック9Aおよび第2の被動ラック9Bと同行移動する。転舵角センサにて検出された転舵角等に応じて、トレッド幅変更アクチュエータ11を駆動制御し、トレッド幅WTを変更する。
(もっと読む)
車両用操舵装置
【課題】転舵し易い車両用操舵装置を提供すること。
【解決手段】操舵部材が左方向に操舵された場合、転舵軸16が左方に移動し、転舵輪としての左右の後輪6L,6Rが、右方向に転舵される。転舵軸16の左方に移動に連動して、移動機構としての連動機構50のリンク58が揺動中心C1の回りに揺動する。リンク58の揺動によって、車両の後部のカウンタウェイト4を、操舵部材の操舵方向(左方向)とは反対の方向である右方向に移動させる。左の後輪6Lに負荷されるカウンタウェイト4の分配荷重WLを、右の後輪6Rに負荷されるカウンタウェイト4の分配荷重WRよりも小さくする(WL<WR)。
(もっと読む)
電気自動車
【課題】インホイールモータ駆動装置及び独立操舵装置を備えた電気自動車において、車輪の定位置旋回に必要な最小限の円形のスペースから車体やボディの一部が突き出すことのない構造とすることにより、最小限の駐車スペースで定位置旋回ができるようにすることである。
【解決手段】車輪が、左右の前輪17a、17bと左右の後輪17c、17dの4輪の場合、左右の前輪17a、17bのみ、左右の後輪17c、17dのみ、又は全車輪17a、17b、17c、17dにインホイールモータ駆動装置27を設け、各車輪17a、17b、17c、17dに独立操舵装置を搭載し、各車輪17a、17b、17c、17dのキングピンの軸線と路面との交点Aを、車体12の内側の円周上に位置させた構成とした。
(もっと読む)
車両用制御装置
【課題】車輪のキャンバ角を調整するキャンバ角調整装置を備えた車両に用いられる車両用制御装置に関し、キャンバ角の変更に伴う車両の挙動特性の変化に関する指標値を精度よく算出し得る車両用制御装置を提供する。
【解決手段】車両用制御装置100は、車両の状態に応じてキャンバ角調整装置44を制御し、車両の後輪のキャンバ角を調整する。車両用制御装置100は、ヨーレートセンサ装置81で検出されたヨーレートYを、ステアリングセンサ装置63Aで検出されたステア角Sで除算し、単位ヨーレートゲインを算出する。車両用制御装置100は、ステア角変化量SVが0である対象基準時に基づいて、算出対象期間TPを特定し、算出対象期間TP内の単位ヨーレートゲインに基づく期間内平均値を算出する。
(もっと読む)
搬送台車
【課題】 従来の台車は、各隅角に設けた四個の車輪と、台車の走行方向の中央部の前後端に対の転舵車輪を設け、転舵車輪を無端ベルトで懸架し、前端の転舵車輪を、前方連結部材で操作し、前端の転舵車輪の方向に対して、後端の転舵車輪の方向を、逆方向にする構造で、内輪差を無くし、狭い範囲での旋回を可能とする。しかし、転舵車輪を固定用の車輪に変換する構造は開示されていない。
【解決手段】 本発明は、搬送用の台車の基板には、台車の走行方向の左右端中央部で、かつ前後方向において、軸受部を介して、対の固定車輪を架承、また、この台車には、走行方向の中央で、かつ前後方向において、軸受部を介して、対の転舵車輪を設けた搬送台車で、ハンドルの立上げで、転舵車輪、固定用の車輪に変換し、手押し式の台車に、また、ハンドルを水平状態として、この転舵車輪、旋回用の車輪に変換し、牽引式の台車にする構造である。
(もっと読む)
ステアバイワイヤ式操舵装置
【課題】旋回時に内外輪に作用するコーナリング力が略均等になるようにトー角を調整できるステアバイワイヤ式転舵装置を提供する。
【解決手段】転舵用モータ6の回転を転舵軸10に伝える転舵動力伝達機構18と、トー角調整用モータ7の回転でトー角を調整するトー角調整動力伝達機構30とを備える。モータ6,7の失陥時に、各モータ6,7の動力伝達経路を切り換えて転舵可能にする切換機構17と、各モータ6,7に転舵角およびトー角の指令信号をそれぞれ与えるステアリング制御手段とを設ける。ステアリング制御手段は、車速とヨーレイトに応じてトー角調整を連続的に行わせるトー角調整制御部を有する。
(もっと読む)
電動アクチュエータ制御装置およびこれを備えた車両の後輪トー角制御装置
【課題】後輪トー角制御装置において、作動量検出手段が故障した際に故障判定期間中に車両の走行フィールが悪化することを抑制する。
【解決手段】設定した制御指示値および作動量検出手段による実測値に基づいて電動アクチュエータ11を制御する後輪トー角制御装置10であって、ストロークセンサ17による実測値と制御指示値との差が所定の閾値S以上あり、且つストロークセンサ17による実測値が変化しない場合に故障が疑われる異常状態と判定し、異常状態が第1判定時間T1にわたって継続した場合にストロークセンサ17の故障と判定するものであり、異常状態が判定された場合、ストロークセンサ17の故障が判定される前に電動アクチュエータ11の作動を停止させるように構成する。
(もっと読む)
農作業車
【課題】農作業を円滑に行うことができる農作業車を提供すること。
【解決手段】本発明では、自走可能に構成した農作業車(1)において、車体フレーム(2)に操舵軸(33)を介して操舵輪(36,37)を左右遥動自在に設けるとともに、車体フレーム(2)と操舵軸(33)との間に操舵輪(36,37)を直進方向に向けて付勢する直進付勢手段(38)を設けることにした。また、前記操舵軸(33)に操舵具(57)を上下方向に回動自在に接続し、操舵具(57)に走行操作レバー(60)を設けるとともに、操舵具(57)を下方に向けて回動させたときに走行操作レバー(60)に当接する当接体(63)を操舵軸(33)に設けて、操舵具(33)を下方に向けて回動操作することによって走行操作可能に構成することにした。
(もっと読む)
車両用制御装置
【課題】高グリップ性と低燃費との両立を図ることができる制御装置及び車両を提供すること。
【解決手段】車輪2のキャンバー角がネガティブキャンバーに調整されると、第1トレッド21の接地圧が増加されると共に、第2トレッド22の接地圧が減少される。これにより、高グリップ性が発揮される。一方、車輪2のキャンバー角がポジティブキャンバーに調整されると、第1トレッド21の接地圧が減少されると共に、第2トレッド22の接地圧が増加される。これにより、低転がり抵抗となり、省燃費が達成される。このように、車輪2のキャンバー角を調整することで、高グリップ性と省燃費との背反する性能の両立を図ることができる。
(もっと読む)
車両のトー角制御装置
【課題】車両のトー角制御装置において、アクチュエータの電源電圧の変動時においても適切な制御を可能にする。
【解決手段】自動車の各車輪のトー角を変化させるアクチュエータ8と、自動車の運動状態量を検出する各種センサ10,11,14,17とを有し、操舵角、車速、ヨーレイトに基づいて電動アクチュエータ8の目標制御量を設定し、目標制御量に基づいて電動アクチュエータ8を駆動制御するトー角制御装置であって、バッテリのバッテリ電圧Vbを検出するバッテリ電圧センサ16と、バッテリ電圧センサ16が検出したバッテリ電圧Vbに基づいて、目標制御量を増減させる目標駆動電流補正部26とを有することを特徴とする。
(もっと読む)
1 - 20 / 109
[ Back to top ]