
Fターム[3D034CA01]の内容
操向リンク系及び4WS (6,986) | 4WSの目的、機能 (564) | 操舵性能の向上 (408)
Fターム[3D034CA01]の下位に属するFターム
Fターム[3D034CA01]に分類される特許
1 - 20 / 66
インホイールモータ車用転舵装置
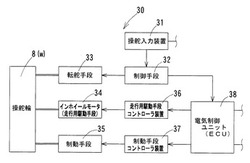
【課題】転舵アクチュエータを用いて、アッパアームに設けた上下方向の転舵軸周りに車輪を回転させるインホイールモータ車用転舵装置において、転舵の際の抵抗を小さくする。
【解決手段】車両のアッパアームに設けた上下方向の転舵軸20周りに転舵手段33を備え、前記転舵手段33は、転舵アクチュエータ10の動作によりホイールwを前記転舵軸20周りに回転させて転舵する機能を有し、前記転舵アクチュエータ10の動作は、前記転舵手段33とは別に設けた操舵入力装置31からの入力信号に基づき制御手段32が制御し、前記制御手段32は、前記ホイールwが転舵する際に前記入力信号に基づいて、そのホイールwに設けた制動手段35の制動を解除又は弛緩する制御を行うインホイールモータ車用転舵装置とした。
(もっと読む)
四輪操舵制御装置

【課題】パワーステアリング装置が故障する場合に備えて、四輪操舵装置の後輪の転舵機能を利用して、車両の転舵ができる四輪操舵制御装置を提供する。
【解決手段】操舵部材2の操作に基づく操舵トルクを検出するトルクセンサ10と、操舵角を検出する操舵角センサ4と、トルクセンサ10の検出値に基づいて前輪を転舵するための補助力を得る操舵補助制御部31と、操舵角センサ4若しくはトルクセンサ10の検出値に基づいて後輪を転舵制御する転舵制御部41とを備え、転舵制御部41は、操舵補助制御部31の機能に故障があると判定された場合に、後輪を逆相側でのみ転舵制御する。
(もっと読む)
車両操舵装置
【課題】ステアバイワイヤ装置のフェール時に十分な車両の運動を確保するための車両操舵装置を提供する。
【解決手段】ステアバイワイヤ装置12により転舵する第1の車輪2と、運転者のための操作部材5との機械的連結により転舵する第2の車輪3と、を備える車両1のための車両操舵装置10は、操作部材5への入力により回転可能に操作部材5に連結されている回転軸32と、回転軸32の回転可能範囲を制限するための回転角抑制機構34と、を備える。回転角抑制機構34は、ステアバイワイヤ装置12のフェール時に回転可能範囲を超える回転を回転軸32に許容するよう構成されている。
(もっと読む)
走行駆動換向装置
【課題】走行駆動換向装置において、装置高さを低く抑える。
【解決手段】走行駆動換向装置1は、車両フレーム5に旋回可能に軸支された旋回軸6と、旋回軸6を任意の方向に旋回させる操舵ユニット7と、旋回軸6の下端部に設けられ、車輪11を回転駆動する走行モータ8cを含む走行ユニット8と、を備える。走行モータ8cから導出された電源ケーブル3は、旋回軸6の内部に挿入され、旋回軸6の中を横切って車両フレーム5上に水平方向に引き出されて、走行モータ8cの動作を制御するコントローラ9へ接続される。これにより、車両フレーム5上に引き出された電源ケーブル3による装置高さの増大を抑制することができる。
(もっと読む)
車両運動制御装置およびそれを有する車両運動制御システム
【課題】制御対象のアベイラビリティに応じて、より最適な車両運動制御を実行することができるようにした車両運動制御装置を提供する。
【解決手段】異なる複数の制御対象を制御してアプリ要求値を実現する車両横方向運動制御を行う場合に、各制御対象のアベイラビリティ(最大制御量および制御量の変化量を含む制御可能範囲)をアベイラビリティ演算部5から制御要求部1に対して伝える。これにより、各アプリケーションでアベイラビリティ情報を踏まえて、性能限界を超えない制御要求を生成することが可能となり、制御対象のアベイラビリティに応じて、より最適な車両運動制御を実行することが可能となる。
(もっと読む)
車両の走行制御装置
【課題】車両の旋回状態量が過大になることを防止しつつ、車両の軌跡が運転者の希望に則した目標軌跡になるよう前輪及び後輪の舵角を制御する。
【解決手段】前舵角可変装置14又はバイワイヤ式の操舵装置96と、後輪操舵装置60とを備えた車両の走行制御装置。車両の軌跡の制御を開始又は更新すべきと判定した時点に於ける運転者の操舵操作量及び車速に基づいて前輪の暫定の目標舵角を演算し、暫定の目標舵角に基づいて車両の旋回状態量を推定する(S350〜500)。旋回状態量の大きさが基準値を越えないときには暫定の目標舵角に基づいて前輪の舵角を制御する。旋回状態量の大きさが基準値を越えるときには基準値を越えないよう補正された旋回状態量に基づいて前輪及び後輪の目標舵角を演算し、目標舵角に基づいて前輪及び後輪の舵角を制御する(S600)。
(もっと読む)
操舵制御装置
【課題】操舵制御装置において、車両挙動の安定化させつつ、車両の前後輪の操舵をより適切に制御することを可能とする。
【解決手段】操舵制御装置100は、所定の走行軌跡を走行するように操舵輪の舵角を変更可能な操舵機構200を備えた車両10の操舵制御装置であって、車両を所定の走行軌跡に追従させるための操舵輪の目標舵角を特定する特定手段240と、特定された目標舵角を、前記車両の加速度に基づいて補正する第1の補正手段100と、操舵輪の舵角が前記補正された目標舵角になるように前記操舵機構を制御する制御手段100とを備える。
(もっと読む)
操舵装置
【課題】複雑で高価な機構や制御を用いることなく、簡単な構造で確実に二輪操舵と四輪操舵を切り替えることのできる操舵装置を提供する。
【解決手段】前輪操舵機構52が連結された操作部51に対して、後輪操舵機構53を連結することにより四輪操舵とし、後輪操舵機構53の連結を解除することにより二輪操舵とする操舵切り替え機構54を備えたので、複雑な機構や制御を必要とすることなく、簡単な構造で確実に二輪操舵と四輪操舵を切り替えることができる。
(もっと読む)
トレイラのためのステアリングのとれる単一のホイールユニット
【課題】トレイラのためのステアリングのとれる単一のホイールユニットを提供する。
【解決手段】サスペンション機構(15)と、このサスペンション機構(15)に取着されているホイール集合体とを支持しているホイールフレームと、前記ホイールフレームと、車両本体(11)との間に取着され、車両の向きを変えるように、前記車両(11)に対して前記ホイールフレームを回動するためのステアリング手段とを有する前記車両本体(11)に取着されるように適合されている単一のホイールユニットであって、前記ステアリング手段は、2つのステアリング構成要素(30)を有し、これらステアリング構成要素は、前記ホイールフレームの前部及び後部の各々に1つずつ回動可能に取着され(32、33)、前記車両本体(11)の側面に前記前部及び後部を独立に移動するように作動されることができる、単一のホイールユニット。
(もっと読む)
加加速度情報を用いた車両の運動制御方法
【課題】非定常な車両加減速状態を含む車両のダイナミクスの変化に応じて、制御ヨーモ
ーメント量を調整すること。
【解決手段】入力された横方向の加加速度(Gy_dot)を、入力された車両の前後方向の速度(V)で除した値(Gy_dot/V)に対して、さらに入力された車両の横加速度(Gy)で除した値に比例した物理量に基づいて、車両の前後加速度の制御指令を生成し、生成された前記制御指令を出力する車両の運動制御方法。また、上記の車両の横方向の加加速度(Gy_dot)は、入力された横加速度を(Gy)をもとに求めること。また、入力された車両の横方向の加加速度(Gy_dot)に、速度(V)及び横加速度(Gy)から決定され、予め記憶されたゲイン(KGyV)を乗じ、乗じた値に基づいて、車両の前後加速度を制御する制御指令を生成し、生成された前記制御指令を出力する車両の運動制御方法。
(もっと読む)
ロッド移動規制装置
【課題】コンパクトな構造のロッド移動規制装置を提供する。
【解決手段】ロッド1の軸方向への移動を規制するロッド移動規制装置101であって、ロッド1に形成された溝7内に配置され、ロッド1の軸方向への移動を規制又は許容するストッパピン10と、ストッパピン10をその軸心を中心に回転させる回転手段11とを備え、ストッパピン10には、ロッド1の軸方向への移動を許容するための切り欠き17が形成され、ストッパピン10は、ロッド1の軸方向への移動を規制する際には、ロッド1が切り欠き17に進入不可能となる回転位置に設定される一方、ロッド1の軸方向への移動を許容する際には、ロッド1が切り欠き17に進入可能となる回転位置に設定される。
(もっと読む)
操舵制御車両
【課題】操舵制御手段が制御不能となった場合に車両挙動をより安定化させる。
【解決手段】自動車Vは、左右後輪3rに設けられた後輪トー角可変機構6と、左右前輪3fと左右後輪3rに設けられた減衰力可変ダンパ4およびスタビライザ8とを有する。ECU20は、故障検出部34によって左右両方の後輪トー角可変機構6に故障が検出された場合(ステップS5:Yes)、前輪3のダンパ4rの目標減衰力を大きく補正するとともに(ステップS6)、フロントスタビライザ8fの目標ロール剛性を高く補正する(ステップS7)。また、ECU20は、故障検出部34によって左右どちらかの後輪トー角可変機構6に故障が検出された場合(ステップS5:No)、故障した側の後輪3rの目標減衰力を小さく設定するとともに(ステップS11,S13)、フロントスタビライザ8fの目標ロール剛性を高く補正する(ステップS7)。
(もっと読む)
作業機械
【課題】起伏の激しい路面での走行性を維持し、作業フロント装置作業時の作業安定性を向上させることができるとともに、それらの両性能を簡易な構成で実現することができる作業機械を提供する。
【解決手段】作業時に、前側左右2台クローラユニット224a,224bは前端部間隔が後端部間隔より拡開したステアリング姿勢(作業機械前方を上として逆さハの字形状)になるように揺動され、後側左右2台のクローラユニット224c,224dは後端部間隔が前端部間隔より拡開したステアリング姿勢(作業機械前方を上としてハの字形状)になるように揺動される。これにより作業機械1は第1作業時姿勢となり、安定領域は広くなり、作業安定性を向上させることができる。従来の構成に、クローラユニットを能動的に左右揺動するステアリングリシンダ206a〜206dを付加しただけで、走行性能、作業安定性能を簡易な構成で実現することができる。
(もっと読む)
車両挙動制御装置
【課題】 運動状態検出センサの故障時等における車両挙動の乱れを抑制した車両挙動制御装置を提供する。
【解決手段】 ヨーレイトFB値設定制御を開始すると、ATTS−ECU16は、ステップS21で実ヨーレイトγrealと規範ヨーレイトγrefとの差Δγを算出する。次に、ATTS−ECU16は、差Δγの絶対値|Δγ|に基づき、ステップS22でヨーレイト差−ゲインマップからヨーレイト制御ゲインGyを検索/設定する。次に、ATTS−ECU16は、ステップS23で実ヨーレイトγrealと規範ヨーレイトγrefとに基づきヨーレイトFBベース値YRbaseを設定した後、ステップS24でYRbaseにヨーレイト制御ゲインGyを乗じることによってヨーレイトFB値YRfbを設定/出力する。
(もっと読む)
車両操舵装置
【課題】少なくとも前輪の転舵角及び車速に基づいて左右の後輪舵角を変更可能とする車両操舵装置において、雨天時の後輪タイヤによる泥水の跳ね上げを少なくする。
【解決手段】ワイパ速度センサや雨滴センサの入力信号に基づいて走行中における降雨量を推定する降雨量推定手段と、後輪の目標舵角が、推定降雨量に対応して設定される、許容最大舵角を超えないように制限する補正手段とを備えて、降雨時の後輪の可動角度を制限するようにした。
(もっと読む)
車両舵角制御装置及び車両舵角制御方法
【課題】車両特性モードを切り替えた際における目標転舵角の急変を抑える。
【解決手段】車体速Vとステアリングホイール1の操舵角θとから推定する車両の走行状態に係る車両状態量に基づき目標ヨーレートおよび目標横速度を演算する。その演算した目標ヨーレートおよび目標横速度に基づいて操向輪の目標転舵角を演算する。その目標転舵角を目標値として、転舵アクチュエータを介して操向輪を転舵制御する。運転者の操作によって車両特性モードの選択切替を検出すると、一時的に、過渡特性に係る状態量を除いた車両状態量に基づき目標ヨーレートおよび目標横速度を演算する。
(もっと読む)
車両用転舵制御装置および車両用転舵制御方法
【課題】ブレーキ液圧の変動によらず、転舵対象車輪の車輪転舵角を安定性を良くすることのできる車両用転舵制御装置および車両用転舵制御方法を提供する。
【解決手段】ブレーキ液圧補正演算部61は、ブレーキ液圧が上昇している場合において、ブレーキ液圧が減少したときにブレーキ液圧を増加させて補正したブレーキ液圧補正値を出力する。そして、路面摩擦係数推定部63は、このブレーキ液圧補正値に基づいて路面摩擦係数を推定する。これにより、操舵制御量が安定化しスプリットμ路における運転者による修正操舵を容易にする。
(もっと読む)
四輪操舵装置
【課題】後輪21が脱輪した場合にも容易に復帰可能な四輪操舵装置1を提供する。
【解決手段】運転者の操舵に応じて後輪21を転舵するアクチュエータ25と、所定車速以下でアクチュエータ25による後輪21の転舵を禁止する後輪転舵禁止手段8aとを備えた四輪操舵装置1において、後輪21に配置された懸架装置10の伸長量を検出するストロークセンサ26を設け、後輪転舵禁止手段8aは、伸長量が所定値以上の場合には、後輪21の転舵を禁止しない。後輪21が脱輪した場合には懸架装置10が通常の場合より伸長するので、その伸長量が所定値以上か否かを判定することにより、後輪が脱輪しているか否かを検出することができる。後輪が脱輪している場合に、後輪転舵禁止手段は後輪の転舵を禁止しないので、後輪を転舵させることができ脱輪から容易に復帰することができる。
(もっと読む)
車両の挙動制御装置
【課題】目標車両モデルの型式に拘わらずに適用でき、且つフィードバック制御や車体スリップ角の推定を行わずに、フィードフォワード制御により所望の車両挙動を得ることのできる車両の挙動制御装置を提供する。
【解決手段】車両の挙動制御装置1において、前輪舵角δfを検出する操舵角センサ3と、車速Vを検出する車速センサ2と、後輪の転舵に供される後輪転舵装置4と、前輪舵角δfと車速Vとに基づき、目標前輪タイヤ横力Yftおよび目標後輪タイヤ横力Yrtを設定する目標タイヤ横力設定部を備えた目標車両モデル設定部13と、目標前輪タイヤ横力Yftと目標後輪タイヤ横力Yrtとに基づき、後輪転舵装置4に転舵させる目標後輪舵角δrtを設定する後輪転舵量設定部14とを備えるように構成する。
(もっと読む)
ステアリング装置付きサスペンション
【課題】 車輪の転舵角を大きくできるステアリング装置付きサスペンションを提供する。
【解決手段】 ステアリング装置は、車両幅方向に伸び第1ジョイント16fL〜16rRにて転舵手段に連結したステアリング・シャフト6fL〜6rRと、これに第2ジョイント17fL〜17rRにて連結した変向歯車組及びこれに噛み合う転舵歯車組を支持する第1アクスル・ハウジング7fL〜7rRと、これに揺動可能に取り付けられて転舵歯車組により回動し車輪10f〜10rRを転舵する第2アクスル・ハウジング8fL〜8rRとを有する。サスペンションは、第1アクスル・ハウジング及び車体30間を揺動可能に支持するロア側リンク部材13fL〜13rR及びアッパ側サスペンション部材11fL〜11rRを有する。ステアリング・シャフトに車体及び第1アクスル・ハウジング間を揺動可能に連結するサスペンションのリンク機能を持たせた。
(もっと読む)
1 - 20 / 66
[ Back to top ]