
Fターム[3D037EA08]の内容
補機駆動、推進制御及び安全装置 (4,671) | 推進制御装置・目的 (784) | 安全、警報 (183)
Fターム[3D037EA08]に分類される特許
121 - 140 / 183
機器の操作装置
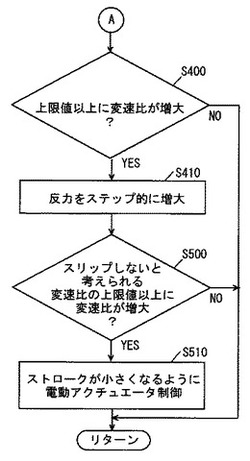
【課題】車両の挙動に対して好ましくない操作を抑制する。
【解決手段】ECUは、エンジン回転数が予め定められた値より小さくなる変速比の上限値および車両がスリップしないと考えられる変速比の上限値の少なくともいずれか一方の値以上に変速比が増大すると(S400にてYES)、シフトレバーの反力がステップ的に増大するように、反力を発生させる電動アクチュエータを制御するステップ(S410)を含む、プログラムを実行する。
(もっと読む)
車間維持支援装置および車間維持支援方法

【課題】アクセルペダル反力の付与による運転者へ注意喚起を確実なものとする。
【解決手段】所定の条件下で、アクセルペダルに反力を与えてドライバに注意を喚起する場合、アクセル開度Accと駆動トルクとの関係を、通常の対応関係とは異なる対応関係へと変更する。これにより、ドライバがアクセルペダル反力を感じやすくなるアクセル開度となるようにドライバのアクセル操作を誘導できるので、アクセルペダル反力の付与によって確実に運転者へ注意を喚起できる。また、アクセルペダルの戻し操作が検出されると補正を中止するので、アクセルペダルが再度踏み込まれた際の加速のもたつき感などの違和感をドライバに与えないようにすることができる。
(もっと読む)
車両用運転操作補助装置
【課題】車両制御モードの切換を運転者が容易に覚知することができる車両用運転操作補助装置を提供する。
【解決手段】
車両用運転操作補助装置は、車両制御モードが切り換わる際に切り換わりの重要度に応じて車両特性を一時的に変更し、運転者に車両制御モードの切り換わりを知らせる。自動制御モードから手動制御モードの高速領域に切り換えられる場合は、その他の切り換わりよりも車両特性の変更を強調して行う。
(もっと読む)
車両の制御装置
【課題】車両の走行によって周囲が受ける影響を回避する。
【解決手段】車速Vを予め定められた速度V(0)に減速できる距離L(1)を算出するステップ(S104)と、車両前方における距離L(1)より遠方に、水溜りが存在するか否かを判断するステップ(S106)と、水溜りが存在すると判断されると(S106にてYES)、速度V(0)より早い速度で車両が水溜りを走行すると水溜りからの水が飛散する範囲に歩行者が存在するか否かを判断するステップ(S108)と、歩行者が存在すると判断されると(S108にてYES)、現状の速度で走行すると、水溜りから飛散する水を歩行者が受ける可能性があることを音声で警告するステップ(S110)と、アクセルペダルの操作反力を断続的に変化させるステップ(S118)とを含むプログラムを実行する。
(もっと読む)
車両用運転操作補助装置
【課題】運転者の操作を将来の走行環境に応じて適切にアシストできるような車両用運転操作補助装置を提供する。
【解決手段】レーザレーダ10,前方カメラ20,後側方カメラ21および車速センサ30によって、車両状態および車両周囲の走行環境を検出する。コントローラ20は、検出された車両状態、走行環境から、車両もしくは車両周囲の走行環境の将来を予測し、将来において必要な運転操作量、例えば操舵反力を推定する。操舵反力制御装置60は、必要な操舵反力となるようにサーボモータ61を制御し、運転者の操作を補助する。
(もっと読む)
ハイブリッド車およびその制御方法
【課題】アクセル操作に対する違和感を運転者に与えるのを抑制する。
【解決手段】エンジンとモータとにより走行可能で、モータと電力をやり取り可能なキャパシタと、キャパシタと並列接続されたDC/DCコンバータと、DC/DCコンバータを介してモータと電力をやり取り可能な二次電池とを備えるハイブリッド車において、キャパシタの残容量Scが小さいほどアクセルペダルの操作感が重くなるようペダルに反力を作用させるアクチュエータを制御する(S190)。これにより、同一のアクセル開度でもキャパシタの残容量によって出力されるトルクが左右されることによる違和感を運転者に与えるのを抑制することができる。
(もっと読む)
自動車の制御装置及び自動車
【課題】後輪に動力を与えるモータを備えた自動車において、車両が旋回する時に、後輪が横滑りしない範囲で十分な駆動力や制動力を得ることができる自動車の制御装置を提供する。
【解決手段】車両旋回量と前輪トルクから後輪が横滑りしない範囲の後輪制駆動力を計算し、モータトルクを連続的に制御する。具体的には、車両旋回量が大きいほど、モータトルクの絶対値を小さくし、前輪トルクの絶対値が大きいほど、モータトルクの絶対値を大きくする。
(もっと読む)
車間維持支援装置および車間維持支援方法
【課題】アクセル操作を行う際の違和感を低減できる車間維持支援装置および車間維持支援方法を提供する。
【解決手段】先行車両との間の車間距離が車間距離閾値より短くなった時に、アクセルペダル操作が行われていれば、アクセルペダルに反力を加える制御を行い、ドライバにアクセルペダルを離すように促す。このとき、アクセルペダルがさらに踏み込まれると、アクセルペダルに加えた反力を低減するように制御する。
(もっと読む)
自動車用ペダル装置
【課題】クリープ現象を停止し、しかもペダル装置位置調節機能を有したペダル装置を提供する。
【解決手段】支持棒12と揺動板14を使用してアクセルペダル3とブレーキペダル4をシーソー機構に備え、ブレーキ用バネ16によりブレーキペダル4が常時踏み込まれた状態に停止させた。次に床面、自動車前後に沿って配置されたレール50とペダル装置を支持する土台20をボルト47で噛み合わせ、モータ70で歯車60,歯車63,歯車66を介してボルト47を正回転又は逆回転させることによりペダル装置の前後調節を行う。
(もっと読む)
警報装置
【課題】自動車のアクセルペダルに組込まれる警報装置において、運転操作に影響を及ぼすことなく、運転車に確実に注意を促すことができるようにする。
【解決手段】アクセルペダル1のペダルプレート4の表面にエアノズル8を開口させる。エアノズル8にエア管路9を介して電磁式開閉弁10を接続し、電磁式開閉弁10にエア源11を接続する。コントローラ12によってエア源11の作動及び電磁式開閉弁10の開閉を制御する。電磁式開閉弁10を開いてエア源11から圧縮エアをエアノズル8に供給して、エアノズル8から圧縮エアを噴射することにより、運転操作に影響を及ぼすことなく、また、不快な振動を伴うことなく、確実に運転者に注意を促すことができる。
(もっと読む)
警報装置
【課題】自動車のアクセルペダルに組込まれる警報装置において、運転操作に影響を及ぼすことなく、運転者に確実に注意を促すことができるようにする。
【解決手段】車体に固定されたペダルブラケット2に回動可能に支持されたアーム部材3の先端部にペダルプレート4をピン6によって回動可能に取付け、ストッパ7A、7Bによってその回動範囲を一定に制限する。アーム部材3に電動モータ8を取付け、電動モータ8の回転軸9にロータ10を取付ける。ペダルプレート4の背面部に当接部11A、11Bを突出させる。コントローラ13からリード線12を介して電動モータ8に給電してロータ10を回転させると、ロータ10が当接部11A、11Bに交互に当接してペダルプレート4を周期的に回動させて振動させる。これにより、運転操作に影響を及ぼすことなく、確実に運転者に注意を促すことができる。
(もっと読む)
車両用運転操作補助装置および車両用運転操作補助装置を備えた車両
【課題】運転者の運転意図に反した加減速が行われることのない車両用運転操作補助装置を提供する。
【解決手段】車両用運転操作補助装置は、自車両と前方障害物との余裕時間に基づいて自車両のリスクポテンシャルを算出し、リスクポテンシャルが大きいほどアクセルペダルを操作するときに発生する操作反力を増大させる。またリスクポテンシャルが大きいほど、自車両に発生する駆動力を低下するとともに制動力を増大させる。リスクポテンシャルに応じた制駆動力制御を行う場合に、加速意図の場合は加速抑制までを許可し、一定意図の場合はエンブレまでを許可し、エンブレ意図の場合は緩減速制御までを許可し、緩減速意図の場合は減速制御までを許可し、減速意図の場合は運転者のブレーキペダル操作と制動制御との加算処理までを許可するように、制駆動力制御の作動スケジュールを変更する。
(もっと読む)
アクセル全閉学習装置
【課題】複数のアクセルセンサのアクセル全閉位置での出力を学習する全閉学習において、複数のアクセルセンサの出力が共に変動する故障モードで発生する誤学習の影響を軽減する。
【解決手段】アクセルセンサ101,102の出力に基づいて全閉学習値を更新する際の更新周期及び更新量を、各アクセルセンサ101,102毎に異なる値TGVPA1,TGVPA2とKGVPA1,KGVPA2に設定して、サブ側の全閉学習値GVPA2の学習更新速度を、メイン側の全閉学習値GVPA1に対して遅くすることで、二重系アクセルセンサの出力が共に低下する故障モードにおいて、サブ側の全閉学習値GVPA2の誤学習の影響度を小さくする。そして、サブ側のセンサ出力から求めたアクセル開度演算値APA2を、制御用アクセル開度として選択することにより、故障モードで発生する誤学習の影響を軽減する。
(もっと読む)
電動搬送車の走行制御装置
【課題】運搬作業者が停止中の電動搬送車に乗り降りする際、身体の一部や荷物がアクセル操作具に触れても、電動搬送車が不測に動き出すことがないようにする。
【解決手段】車輪2を駆動する走行用モータMと、アクセルレバー3やアクセルペダル18等のアクセル操作具と、アクセル操作具の操作により走行用モータMへの通電状況を変化させて電動搬送車の走行及び停止を行うコントローラ4とを備えた電動搬送車において、前記アクセル操作具から離れた位置に、電動搬送車に搭乗した運搬作業者が運転姿勢にあることを検知するセンサ5を設け、当該センサ5の検出結果に基いてアクセル操作具の操作を牽制及び牽制解除するように構成する。
(もっと読む)
車両用運転操作補助装置および車両用運転操作補助装置を備えた車両
【課題】車両周囲の状況を運転者に伝達する車両用運転操作補助装置を提供する。
【解決手段】車両用運転操作補助装置は、自車両周囲の走行環境に基づいて自車両周囲のリスクポテンシャルを算出する。算出したリスクポテンシャルをアクセルペダル反力により触覚を介して運転者に伝達するとともに、視覚情報として運転者に伝達する。視覚情報を用いる場合は、リスクポテンシャルに情報を図形や数値により表示する。
(もっと読む)
車両用運転操作補助装置および車両用運転操作補助装置を備えた車両
【課題】運転者の運転意図に反した挙動を示すことのない車両用運転操作補助装置を提供する。
【解決手段】車両用運転操作補助装置は、自車両と前方障害物との車間時間および余裕時間に基づいて自車両のリスクポテンシャルを算出する。リスクポテンシャルが大きいほど、自車両に発生する駆動力を低下するとともに、アクセルペダルを操作するときに発生する操作反力を増大させる。アクセルペダル操作パターンから運転者の運転意図を検出し、加速意図が小さいほど、制駆動力制御における駆動力の低下量が大きくなるように補正する。
(もっと読む)
省燃費運転システム
【課題】道路勾配情報を用いて、省燃費運転を効果的に促す省燃費運転システムとその制御方法の提供。
【解決手段】車両の位置を特定する車両位置特定装置(2)と、位置における勾配を記憶している勾配情報記憶装置(道路勾配記憶部12A)と、車両位置特定装置(2)からの情報と勾配情報記憶装置(12A)からの情報から省燃費運転の態様を決定する制御装置(10)とを有しており、該制御装置(10)は、車両の位置の情報から車両(1)が走行している地点の勾配(θ1、θ2)を求め、車両の位置と走行地点の勾配から燃費が良好となるアクセル及び/又はブレーキの操作態様を決定する様に構成されている。
(もっと読む)
車両用運転操作補助装置および車両用運転操作補助装置を備えた車両
【課題】システムの作動状況を視覚情報として伝達する車両用運転操作補助装置を提供する。
【解決手段】車両用運転操作補助装置は、自車両周囲の障害物状況に基づいて障害物に対するリスクポテンシャルを算出する。リスクポテンシャルに基づいてアクセルペダルに発生させる操作反力の反力増加量を算出するとともに、制駆動力制御を行うための目標減速度を算出し、リスクポテンシャルに応じた操作反力制御および制駆動力制御を行う。アクセルペダル反力増加量および目標減速度を表示装置のX軸およびY軸にそれぞれ設定し、車両用運転操作補助装置の作動状況を表すアイコンを表示する。リスクポテンシャルの大きさに応じてアイコンの大きさを変更する。
(もっと読む)
車両用運転操作補助装置および車両用運転操作補助装置を備えた車両
【課題】触覚情報に加えて視覚情報を用いてリスクポテンシャルを運転者に伝達する車両用運転操作補助装置を提供する。
【解決手段】車両用運転操作補助装置は、自車両と前方障害物との接近度合を表すリスクポテンシャルに応じた操作反力を発生するようにアクセルペダル操作反力制御を行う。このとき、自車両前方に存在するどの障害物を対象としてリスクポテンシャルを算出し、反力制御を行っているかをわかりやすく運転者に伝えるために、HUDの先行車に対応する位置に参照枠を表示する。参照枠の大きさ、表示色、および輝度をリスクポテンシャルに応じて設定する。
(もっと読む)
ペダル両踏抑制装置
【課題】運転者が車両停止のためにブレーキペダルを踏込んだ際、誤ってアクセルペダルを同時に踏み込むことを抑制する。
【解決手段】ペダル両踏抑制装置50Aにおいて、ブレーキランプスイッチ26は、ブレーキペダル28の踏み込みを検出する。ブレーキペダル28の踏み込みが検出された場合に、ECU100は、アクセルペダル移動装置32のモータ18を作動させてアクセルペダル10の回動軸12を移動させることにより、ブレーキペダル28の操作方向において、アクセルペダル10をブレーキペダル28から離間するよう移動させる。
(もっと読む)
121 - 140 / 183
[ Back to top ]