
Fターム[3D037EA08]の内容
補機駆動、推進制御及び安全装置 (4,671) | 推進制御装置・目的 (784) | 安全、警報 (183)
Fターム[3D037EA08]に分類される特許
161 - 180 / 183
ペダル装置を備える自動車
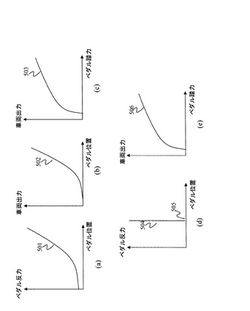
【課題】 後進時の運転の運転が容易な自動車を提供する。
【解決手段】 前進時は、踏み込みに応じてペダルをストロークさせ(a)、ペダルの踏み込み量又はペダル踏力を用いて制動力を制御し(b)(c)、後進時には、ペダルを所定の位置に固定し(d)、ペダルに加えられるペダル踏力に基づいて制動力を制御する(e)。
(もっと読む)
アクセルペダル装置及びこれに用いられるダンパ

【課題】 小型化及び部品点数の減少を図ることができ、しかも、アクセルペダルの踏み込み過ぎを抑止し、作業機を円滑に減速させ、アクセルペダルの踏み込み量の維持に要する操作者の踏み込み力を軽減させ、作業機の過度の急制動を防止することができるアクセルペダル装置及びこれに用いられるダンパを提供すること。
【解決手段】 トラクタ等の作業機用のアクセルペダル装置1は、踏み込み操作によりR1方向及びR2方向に回動及び逆回動されるアクセルペダル2と、アクセルペダル2の回動及び逆回動によりR1方向及びR2方向に回転及び逆回転される回転軸3と、回転軸3を介してアクセルペダル2に連結されていると共に、アクセルペダル2の回動及び逆回動に対して抵抗力を与えるダンパ4とを具備している。
(もっと読む)
アクセルペダル操作装置
【課題】アクセルスイッチをリンク機構と共に運転室の狭い空間部分に容易に能率よく設置することができ、かつそのアクセルスイッチがアクセルペダルの操作上の妨げとなることが一切ないアクセルペダル操作装置を提供する。
【解決手段】アクセルペダル2の踏込みに応じて回動するペダルレバー12、およびこのペダルレバー12に連動して回動する反転レバー11を有するユニット構造のリンク機構8と、反転レバー11の回動のストローク量を検出してエンジンの燃料噴射量を調整するアクセルストロークセンサ7と、リンク機構8に一体的に組み付けられ、ペダルレバー12と連係してアクセルペダル2の踏込みの有無を検出するアクセルスイッチ28とを具備する。ペダルレバー12にはアクセルペダル2が係合するレバー17の反対側に操作部18が設けられ、この操作部18を介してアクセルスイッチ28が操作される。
(もっと読む)
車両操作装置
【課題】運転者のアクセルペダルに対する誤操作を的確に判断し、不用意な自車両の挙動を防止することにより事故を未然に防止する。
【解決手段】アクセルペダル2に足が置かれているかどうかを検出するための足位置検出センサ13を設ける。そして、足位置検出センサ13とアクセルペダル操作量センサ3のそれぞれの検出値の時間的な変化の様子に基づいて、アクセルペダル2の誤操作を検出する。誤操作を検出したときには、アクセルペダル操作量センサ3の検出信号を排除して、不用意な自車両の挙動を防止する。
(もっと読む)
車両用運転操作補助装置および車両用運転操作補助装置を備える車両
【課題】
運転者の感じるリスクに合ったリスクポテンシャルに基づいて操作反力制御を行う車両用運転操作補助装置を提供する。
【解決手段】
車両用運転操作補助装置は、自車両の車両状態および走行環境に基づいて先行車に対するリスクポテンシャルを算出するとともに、自車両の横加速度に基づくリスクポテンシャルを算出する。リスクポテンシャルの算出に用いる横加速度は、自車両が走行する道路の曲率半径の変化および自車速の変化に基づいて補正を行う。先行車に対するリスクポテンシャルと横加速度に基づくリスクポテンシャルのうち、値の大きな方のリスクポテンシャルに基づいてアクセルペダル反力を制御する。
(もっと読む)
車両用運転操作補助装置および車両用運転操作補助装置を備える車両
【課題】
運転者に対して常にアクセルペダル反力を用いた情報伝達を行う車両用運転操作補助装置を提供する。
【解決手段】
車両用運転操作補助装置は、自車両の車両状態および走行環境に基づいて先行車に対するリスクポテンシャルを算出し、算出したリスクポテンシャルに応じた操作反力をアクセルペダルに発生させることにより、自車両のリスクポテンシャルを運転者に伝える。アクセルペダル反力を用いた情報伝達を行う場合は運転者の足とアクセルペダルとが接している必要があるので、運転者の体格に応じてアクセルペダルの初期位置をオフセットすることにより、アクセルペダルの遊び領域を拡張する。
(もっと読む)
車両用運転操作補助装置用の表示装置および表示方法
【課題】
自車両周囲のリスクポテンシャルを運転者にわかりやすく伝える車両用運転操作補助装置を提供する。
【解決手段】
車両用運転操作補助装置は、自車両と前方障害物との間に仮想的な物体を設け、仮想物体が前方障害物に圧縮されたときに発生する反発力を制御反発力として算出する。車両用運転操作補助装置は、算出した制御反発力に基づいて制駆動力補正量およびアクセルペダル反力指令値を算出し、制駆動力制御およびアクセルペダル反力制御を行う。このとき、自車両の前方画像に障害物情報と仮想物体を重畳した画像を表示装置に表示する。
(もっと読む)
車両のペダル支持構造
【課題】 オフセット衝突時等において、ペダルブラケットを案内部材から確実に離脱させて所定のペダルの回動性能を得ることができる車両のペダル支持構造を提供する。
【解決手段】 操作ペダル22をその支軸26周りに揺動可能に支持する車両のペダル支持構造であって、その前端部がダッシュパネルに固定され操作ペダルの支軸が取り付けられるブラケット34と、その前端部がブラケットの後端部に固定される案内部材44と、ブラケットと案内部材に形成されたスライド式固定機構61と、ブラケット及び案内部材の相対位置を規制する相対位置規制手段68と、を有し、案内部材は、車両衝突時に、ブラケットが後方に移動して案内部材から離脱した後に、操作ペダルの踏み面が相対的に前方に移動するように、ブラケットの姿勢を変化させる案内面62を備えている。
(もっと読む)
車両用運転操作補助装置および車両用運転操作補助装置を備えた車両
【課題】
操作系インターフェイスと非操作系インターフェイスを用いて自車両周囲のリスクポテンシャルを運転者にわかりやすく伝達する車両用運転操作補助装置を提供する。
【解決手段】
車両用運転操作補助装置は、自車両の走行状態データを用いて先行車に対するリスクポテンシャルを算出し、リスクポテンシャルRPをアクセルペダル反力とシートのクッション前部からの押圧力として運転者に伝達する。低リスク領域ではクッション前端部からのみ押圧力を発生し、高リスク領域ではクッション前端部からの押圧力を一定に保ちながら、リスクポテンシャルRPに応じてアクセルペダル反力を増加する。
(もっと読む)
運転意図推定装置、車両用運転操作補助装置および車両用運転操作補助装置を備えた車両
【課題】
自車両とレーンマーカとの相対的な関係が検出できない場合でもドライバの運転意図を安定的に推定する運転意図推定装置を提供する。
【解決手段】
運転意図推定装置は、レーンマーカを検出できている場合は、自車両とレーンマーカとの相対位置関係に基づいてそれぞれが運転意図を有する複数の仮想ドライバを設定し、実際の運転者の運転操作量と仮想ドライバの運転操作量とを比較して、実際の運転者の運転意図を推定する。レーンマーカが検出できていない場合は、自車両と先行車との相対位置関係に基づいて算出される自車両の車線内横位置を用いて、複数の仮想ドライバを設定する。レーンマーカの検出状況に応じて仮想ドライバの運転操作量の算出方法を選択する。
(もっと読む)
車両の事故防止装置及び緊急通報装置
【課題】 運転者の誤操作による事故が発生しやすい場所で、運転者の誤操作を未然に防
止したり、誤操作をいち早く気付かせることにより、暴走や転落などの事故を防止するこ
とができる車両の事故防止装置を提供すること。
【解決手段】 車外の所定場所に設置されたマーカ1への車両Mの接近状態を検出する検
出手段と、検出手段により所定の接近状態が検出されたか否かを判断する判断手段と、判
断手段による判断結果に基づいて所定の報知を行う報知手段とを装備する。
(もっと読む)
ペダル踏力制御装置および安全停止装置
【課題】 ブレーキペダルとアクセルペダルの両踏み時に所望とする制動力を確保する。
【解決手段】 アクセルペダル12をアクセルワイヤ14によってスロットルバルブ18と接続する。一端をスロットルバルブ18に接続したリターンスプリング20の他端は、位置を可変とするブラケット28へ接続する。運転者がブレーキペダル26を踏込んだ際、ブレーキストップランプスイッチ24はモータ22へ信号を送信し、モータ22はブラケット28を図の下方へシフトさせ、リターンスプリング20の弾性力を弱める。一方、ブレーキペダル26の踏込みを検知したストロークセンサ30は、エンジンコントロールユニット32へブレーキオン信号を送信する。エンジンコントロールユニット32はエンジンへの燃料噴射を停止するようにインジェクタ34を制御する。
(もっと読む)
車両のペダル支持構造
【課題】車両衝突時に後退するペダルブラケット5を案内面65によって確実に案内させて所定のペダルの回動性能を確実に得る。
【解決手段】操作ペダル4の支軸42を支持するペダルブラケット5と、前端部がペダルブラケット5の後端部を車両衝突時に離脱可能に支持する支持部64とされると共に、車両衝突時に後方に移動するペダルブラケット5を下側に案内する案内面65が設けられた案内部材6と、を備える。案内部材6は、ペダルブラケット5の後端部が支持部64に対して車両後方以外の方向に相対変位することを規制する規制部66を有する。
(もっと読む)
アクセルペダル全閉学習装置及びそれを搭載した自動車
【課題】 アクセルペダルを軽く踏むだけで走行可能な自動車であっても全閉学習を十分な頻度で実行し且つ異常判定にも支障が生じない。
【解決手段】 このハイブリッド自動車は、アクセルセンサの出力値AP1が第1しきい値V1thr以上になったあと第2しきい値V2thr未満で収束したときにアクセルペダルの全閉学習を実行する。ここで、第1しきい値V1thrが偏差異常判定値Vdif未満のとき(S100でNO)、即ち全閉学習が十分な回数だけ実行されていないときには、全閉学習実行条件が成立しやすいように出力値AP1に基づいて第2しきい値V2thrを設定する(S110〜S140)。このため、全閉学習を十分な頻度で実行することができる。一方、第1しきい値V1thrがVdif以上のとき(S100でYES)、即ち全閉学習が十分な回数だけ実行されたときには、第2しきい値V2thrにVdifを設定する(S150)。
(もっと読む)
走行車
【課題】 本発明は、従来にない作用効果を発揮する画期的な走行車を提供することを目的とする。
【解決手段】 アクセルペダル2の踏み操作により走行する走行車であって、走行を停止させるブレーキペダル1を踏み操作した場合、アクセルペダル2を踏み操作して行なわれるアクセル機構3が作動不能となるように構成されているものである。
(もっと読む)
車両用ペダル
【課題】 車両衝突時における車両用ペダルの後方への変位を防止する。
【解決手段】 車体側ダッシュパネルに取り付けられる車両用ペダル取付ブラケットと、一端側が上記車両用ペダル取付ブラケットの回転支軸に対して回転自在に枢着されているとともに他端側に踏部が設けられた車両用ペダルアームと、一端側が上記車両用ペダル取付ブラケットの回転支軸に対して回転自在に枢着されているとともに他端側がマスターバッグ側作動ロッドに連結されているフォークレバーと、該フォークレバーと上記車両用ペダルアームとを離脱可能に係合する中間係合部材と、中間部を上記車両用ペダル取付ブラケットの回転支軸に対して回転自在に枢着されているとともに、他端側には上記フォークレバーと車両用ペダルアームとを上記中間係合部材を介した係合状態に保持する係合保持部が設けられているデカプラーレバーとからなり、該デカプラーレバーは、車両衝突時において、その一端側が車体側固定部材に当接した時に、上記係合保持部の係合状態が解除されるようにした。
(もっと読む)
自動車の運転姿勢調整装置
【課題】各体格のドライバに対してペダル71,81の配設位置を最適にすることが可能な自動車の運転姿勢調整装置1を提供する。
【解決手段】ペダル71,81の配設位置を調整するペダル調整手段7,8は、検出されたドライバの体格に応じて、当該体格が小さいほどペダル71,81の位置がドライバ側に接近するように、ドライバの体格に略比例する第1の調整特性でもってペダル71,81の位置を調整すると共に、検出された体格が所定の体格よりも小さいときには、第1の調整特性とは異なる第2の調整特性でもってペダル71,81の位置を調整する。
(もっと読む)
電動車両の駆動制御装置
【課題】 電動車両に搭載されるアクセルセンサが断線等で異常を起こした時、より安全に車両停止、エラーの検出を行う。
【解決手段】アクセルセンサ14からの出力信号に急激な変化があった場合、アクセルセンサ値を所定期間T2、0レベルに置き換え、モータ5を停止する。期間T2の間もアクセルセンサの出力をモニタリングし、変化がない場合、期間T2が過ぎるまで0レベル置き換えを維持する。T2経過後はアクセルセンサ14の出力を読み込み、大きな変化があった時、あるいは0レベルに戻った時、モータ5を駆動させるようにして、誤検出でのエラー判定を回避する。
(もっと読む)
衝撃吸収ペダル
【課題】 乗員の着座位置や体格の大きさに差違があっても、乗員の足に入力される衝撃エネルギーを適切に吸収することのできる衝撃吸収ペダルを提供する。
【解決手段】 車両室内の乗員の足元近傍に、回動軸部9を中心に車両前後方向に回動するアクセルペダル3を設け、車両前方からの衝突荷重に対してアクセルペダル3の回動軸部9に抵抗力を付与する抵抗手段19を設け、該抵抗手段19によって衝突荷重によるアクセルペダル3の後方への回動を所定位置にて停止させる衝撃吸収ペダルであって、前記抵抗手段19による回動軸部9への抵抗力を、乗員の着座位置に応じて調整するように構成している。
(もっと読む)
車両用情報提示装置
【課題】 走行路面の状態を体感的に運転者に伝達可能な情報提供装置を提供すること。
【解決手段】 車両に備えられたペダル1を足にて操作する運転者Uに、当該ペダル1を介して走行路面の状況を表す情報を提示する車両用情報提示装置であって、ペダル1の表面に当該ペダルの踏み込み方向とは異なる方向に可動する可動ペダル部11を配設すると共に、この可動ペダル部11の動作を制動する制動手段12を備え、車両の動作状況,車両外部の状況など,走行路面の状況を特定する情報を検出する路面情報検出手段2と、この路面情報検出手段2による検出値に基づいて制動手段12の制動力を制御する制動力制御手段3を備えた。
(もっと読む)
161 - 180 / 183
[ Back to top ]