
Fターム[3D037EB16]の内容
補機駆動、推進制御及び安全装置 (4,671) | 推進制御装置・構造 (1,408) | 伝達手段 (311) | 電気的伝達手段 (204)
Fターム[3D037EB16]の下位に属するFターム
無線、遠隔 (2)
Fターム[3D037EB16]に分類される特許
1 - 20 / 202
アクセルペダル装置
アクセル装置
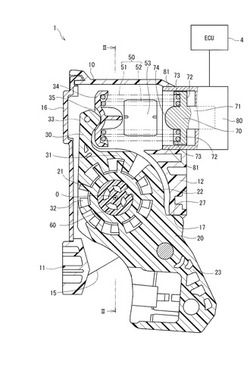
【課題】アクセルペダルの回転を維持するとともに、アクセルペダルを付勢する付勢手段の荷重を調節可能なアクセル装置を提供する。
【解決手段】ハウジング10に回転可能に設けられたペダルアーム20が運転者により踏込操作されると、ペダルアーム20とペダルロータ30とが一体で回転する。スプリング50は、運転者の踏込方向と逆方向にペダルロータ30を付勢する。スプリング50のペダルロータ30と反対側の端部に、スプリング50を支持する支持部材70が設けられる。駆動手段80は、スプリング50の伸縮方向に支持部材70を移動することで、スプリング50の荷重を調節可能である。これにより、駆動手段80が故障して支持部材70の移動が困難になった場合にも、アクセル装置は、スプリング50の復元力によってペダルアーム20を全閉位置に戻すことができる。
(もっと読む)
加速ペダルの踏力調節装置

【課題】部品を交換せずに、必要時に簡便な作業で加速ペダルの踏力を調節することにより、踏力に対する安全法規を忠実に遵守すると共に更に加速ペダルの共通使用を可能にする加速ペダルの踏力調節装置を提供する。
【解決手段】本発明の加速ペダルの踏力調節装置は、キャリアハウジング内に設置され、一端がキャリアハウジングに軸回転自在に支持された回転カムと、キャリアハウジング内に設置され、上面は回転カムの外周面と接触し下面はペダルアームに踏力を提供する弾性部材の一端と接触し、回転カムが回転する時、弾性部材を加圧するか又は加圧を解除する方向に移動するキャリアと、を有することを特徴とする。
(もっと読む)
アクセルペダル反力制御装置
【課題】路面状態の変化に応じてアクセルペダル装置のペダル反力を調節可能なアクセルペダル反力制御装置を提供することを課題とする。
【解決手段】車両Vに備わるアクセルペダル操作部2の操作量に応じて開閉するスロットル開度が開度閾値以上となったときにアクセルペダル操作部2のペダル反力を強める方向に調節する反力発生装置3と、車両Vの走行状態や運転者の操作状態に応じて開度閾値を設定するとともに、車両Vが走行している路面の路面状態を検出する反力制御装置4と、を有するアクセルペダル反力制御装置10とする。そして、反力制御装置4は、路面状態が滑りやすいことを検出したときに、開度閾値を小さくする方向に変更することを特徴とする。
(もっと読む)
車両制御装置
【課題】アイドリング停車中にアクセルペダルが踏み込まれている場合、その状態をドライバが認識することができるようにした、車両制御装置を提供する。
【解決手段】車両に搭載されたアクセルペダル14aの開度を検出するアクセル開度センサ13と、アクセルペダル14aを動作させるアクチュエータ14bと、車両のアイドリング停車中に、アクセル開度センサ13により検出された開度が所定開度以上であるペダル踏み込み状態か否かを判定する判定手段1,2と、判定手段1,2により判定されたペダル踏み込み状態に応じて、アクチュエータ14bを制御するペダル制御手段3とを備える。
(もっと読む)
車両制御装置及び車両システム
【課題】ドライバがパニック状態に陥ったままブレーキペダルと間違えてアクセルペダルを踏んでしまっても、駆動力を安全な領域で制御できるようにする。
【解決手段】入力された自車速情報から自車両が停止状態に遷移して良いか否かを判定する停止状態判定手段と、停止状態判定手段で停止状態に遷移しない場合、入力された自車速情報とクリープ走行情報とからクリープ走行状態に遷移して良いか否かを判定するクリープ走行判定手段と、クリープ走行判定手段でクリープ走行状態に遷移しない場合、入力された自車速情報とクリープ走行情報とアクセルペダル踏込情報から通常走行状態に遷移して良いか否かを判定する通常走行判定手段と、停止状態判定手段とクリープ走行判定手段と通常走行判定手段で判定された走行状態に基づいて、要求駆動力の算出処理方法を切り替え、要求駆動力を算出する要求駆動力算出手段と、を有する。
(もっと読む)
ペダル装置
【課題】駆動源が失陥した場合や、出力を継続するような故障を起こした場合であっても、踏み込みやすい反力を発生する操作性のよいペダル装置を提供する。
【解決手段】アクセルペダル2と、アクセルペダル2に一端が連結され、他端が付勢力発生装置10に第1回動軸線A1回りに回動可能に連結されたペダル側アーム11と、アクセルペダル2に対して踏込反力となるモータ付勢力を付与するための電動モータ26と、第2回動軸線A2回りに回動自在に支持されるとともに、ペダル側アーム11に離脱可能に接触し、電動モータ26が発生するモータトルクをペダル側アーム11に伝達する駆動側アーム21とを備えるアクセルペダル装置1において、駆動側アーム21を、アクセルペダル2の踏込量が大きくなるにつれてペダル側アーム11との接触位置Pが第1回動軸線A1に近づくように設ける。
(もっと読む)
走行制御装置
【課題】ドライバがアクセルペダルを踏み間違えた場合に、意図していない加速を防止するとともに、踏み間違いではなく、真にドライバが加速の意思を持つ場合は、確実に車両を加速させる走行制御装置を提供する。
【解決手段】入力された自車両情報又は外界認識情報に基づいて、加速要求装置の踏み間違いをしたか否かを判断する踏み間違い判断手段と、踏み間違い判断手段にて踏み間違いと判断された場合、一定の踏み込み量で一定の加速要求装置の反力となる第1のモードから、加速要求装置の反力がその一定の反力よりも小さい反力となる第2のモード、又は、加速要求装置の反力及び開度を固定にする第3のモードに変更するモード変更手段と、減速要求が入力された場合、変更された第2のモード又は第3のモードから第1のモードに変更するモード解除手段と、を有する。
(もっと読む)
車両の制御装置
【課題】キックダウンスイッチのオン故障をより的確に判定することのできる車両の制御装置を提供する。
【解決手段】アクセルポジションセンサーの出力電圧VAが下限ガード学習値未満であり(S102:YES)、かつキックダウンスイッチがオン(S103:YES)の状態が所定時間継続したとき(S104:YES)に、キックダウンスイッチのオン故障と判定する(S105)ことで、キックダウンスイッチのオン故障をより確実に判定できるようにした。
(もっと読む)
アクセル装置
【課題】 アクセルペダルの踏込み解除時に第1スライダの位置に拘わらずアクセルペダルがアクセル全閉位置に戻るアクセル装置を提供する。
【解決手段】 支持部材11とアクセルペダル50との間に設けられる第2スプリング80は、レバー54が第1スライダ71から離間するアクセル閉方向へアクセルペダル50を付勢し、第1スライダ71の位置に拘わらずアクセルペダル50をアクセル全閉位置に回動可能である。これによれば環境変化等で内側摩擦部材75と第2スライダ72との摩擦力が増加する、或いは内側摩擦部材75と第2スライダ72との間などに異物が噛み込む等によって、第1スライダ71又は第2スライダ72が固着し、第1スプリング73、74の付勢力がアクセルペダル50に作用しなくなる場合でも、アクセルペダル50は、第2スプリング80の付勢力でアクセル全閉位置に復帰可能である。
(もっと読む)
アクセル踏力検知装置
【課題】複数の特定踏込み領域でアクセルペダルが過大なアクセル踏力で踏込まれた場合にもそのことを運転者に認識させ、しかも特定踏込み領域毎に変化させられたアクセル反力に抗したアクセル踏力でアクセルペダルが踏込まれたことを検知できるようにする。
【解決手段】アクセル装置のアクセルペダルの踏込み領域として、通常踏込み領域と複数の特定踏込み領域とを設定する。アクセル踏力検知装置20は、アクセルペダルが各特定踏込み領域で踏込まれたときには、通常踏込み領域で踏込まれたときとは異なる傾向でアクセル反力を変化させることにより、特定踏込み領域毎のアクセル踏力に節度感を付与する節度機構21と、各特定踏込み領域に対応して設けられ、かつ節度機構21により特定踏込み領域毎に変化させられたアクセル反力に抗したアクセル踏力でアクセルペダルが踏込まれたことを検知する検知部55,61とを備える。
(もっと読む)
作業車両
【課題】変速段を設定する負担を軽減することができるようにした作業車両を提供すること。
【解決手段】作業走行モードと路上走行モードでの変速位置を含む複数の変速位置に変速可能な変速装置の変速位置中の特定の変速位置を手動操作で選択して設定する変速操作レバー171を設け、該変速レバー171を手動操作でスライドさせて前記変速段を選択して設定できる直線的なガイド溝173を設け、該変速レバー171の直線的なスライド操作量に対応した変速段に自動的に変速装置を切り替え制御する制御装置100を設けたので、作業走行モードと路上走行モードを含めて、直感的に目的の変速位置に変速レバー171を容易にシフトさせることができる作業車両である。
(もっと読む)
アクセル装置
【課題】 全閉ストッパと全閉ストッパに当接するリンク機構のリンク部材との間に異物が噛み込むことを抑制可能なアクセル装置を提供する。
【解決手段】 カバー9の内壁99と支持部材2の第2軸支持部27の外壁272とは、リンク機構8および全閉ストッパ28を収容する第3収容室A3を区画形成する。リンク機構8および全閉ストッパ28は、アクセル装置1の外部から遮られ、戻り機構5および踏力ヒステリシス機構10から隔離される。そのため、全閉ストッパ28とリンク機構8の第1レバー81との間に外部の例えば砂や小石等が噛み込むこと、及び、戻り機構5および踏力ヒステリシス機構10で生じる摩耗粉等の異物が噛み込むことを抑制することができる。したがって、全閉ストッパ28と第1レバー81との間に異物が噛み込むことに起因しエンジンのアイドリング回転数が上昇することを抑制可能である。
(もっと読む)
走行支援装置及び走行支援方法
【課題】アクセルペダルの開度を増加させる加速操作を運転者に誘導することが可能な、走行支援装置及び走行支援方法を提供する。
【解決手段】自車両の走行経路上において、自車両の車速を予め設定した目標車速とする目標車速位置を検出し、目標車速位置において車速を目標車速とするための加速を開始する、走行経路上の加速開始位置を検出し、自車両が加速開始位置へ到達するまでに予め設定した所要時間を要する制御開始位置から、自車両の運転者が操作しているアクセルペダル12の戻し方向への開度変化を規制する程度の反力を第一速度でアクセルペダル12に付与し、自車両が加速開始位置へ到達すると、運転者が操作しているアクセルペダル12の開度が目標車速に応じた開度へ導かれるように、運転者が操作しているアクセルペダル12に規制反力付与ステップで付与した反力を第一速度より速い第二速度で減少させる。
(もっと読む)
アクセルペダル装置
【課題】構造の簡素化等を図りつつ、遮磁板等の対策を施すことなく位置センサに対するアクティブ制御機構の磁場の影響を低減ないし防止する。
【解決手段】ペダルアーム20を回動可能に支持するハウジング10、復帰バネ30、ペダルアームの角度位置を検出する磁気式の位置センサ40、所定条件下でペダルアームを休止位置に向けて押し戻すように制御するアクティブ制御機構50(駆動源51,戻しレバー52,制御回路基板53)を備えたアクセルペダル装置において、制御回路基板53には、位置センサ40(ホール素子44)の回路が設けられている。これによれば、従来のように位置センサのための専用の回路基板を設ける必要が無く、又、リード配線等を廃止してバスバー等により位置センサを連結することで、部品点数を削減して、組立工数の削減、低コスト化、装置の小型化等を達成できる。
(もっと読む)
車両の制御装置
【課題】運転者の安心感を損なわない範囲で運転の自由度の制限を緩和して、ドライバビリティーを向上することのできる車両の制御装置を提供する。
【解決手段】アクセルペダル4の踏力及び踏力速度からアクセルペダル4の誤踏み込みを判定して、車両の駆動力を低減するコントローラー7は、ブレーキペダル1の踏み位置のずれの傾向を確認するとともに、その傾向に応じて誤踏み込みと判定したときの車両の駆動力の低減幅を可変としている。
(もっと読む)
アクセルペダル踏込反力制御装置
【課題】 高速クルーズ走行時におけるアクセルペダル踏込負荷の軽減等を図ったアクセルペダル踏込反力制御装置を提供する。
【解決手段】 ステップS1の判定がNoであった場合、反力制御ユニット4は、ステップS2で現在の車速Vに基づいて自動シフト時閾値設定マップから反力付与開始閾値N0を設定する。反力付与開始閾値N0は、高速クルーズ走行時等における標準的なエンジン回転速度Neに所定のマージンを持たせたものであり、車速Vが高くなるほどステップ状に大きくなる。反力付与開始閾値N0の設定を終えると、反力制御ユニット4は、ステップS3で反力付与開始閾値N0に所定値αを加えることで最大反力閾値N1を設定する。反力制御ユニット4は、ステップS4で、現在のエンジン回転速度Neと車速Vとに基づき目標反力Frtを設定したのち、ステップS5で反力アクチュエータ3に駆動電流を出力する。
(もっと読む)
車両の制御装置、車両、車両の制御方法、およびプログラム
【課題】少ない種類のパラメータによりシフトアップのタイミングを運転者に的確に伝達すること。
【解決手段】マニュアルトランスミッションを有する車両に搭載され、車両の車速に対応して予め設定されている目標加速度を、実際の加速度が超えるときには、目標加速度に実際の加速度が近付くようにアクセル開度の調整を行うアクセル開度制御部10を有する車両の制御装置1であって、アクセル開度制御部10は、車両のエンジンの回転速度が所定の値を超えるときには、目標加速度を引き下げるように制御するように構成する。
(もっと読む)
アクセル装置
【課題】 アクセルペダルの踏力差を発生するヒステリシス特性を変更可能なアクセル装置を提供する。
【解決手段】 レバー55は、ローラ52を介してペダルアーム51の回動をヒステリシス回転軸41に伝達する。レバー55の端部551に形成されているねじ部552は、ヒステリシス回転軸41の端部411に形成されているねじ孔411aと結合する。レバー55のヒステリシス回転軸41に対する取付角度を変更するとき、ねじ部552に加えられる締付トルクを変更する。このとき、ヒステリシス回転軸41の回転角は、ヒステリシスばね43の端部431と端部432との相対位置の変化に一対一で対応している。したがって、レバー55のヒステリシス回転軸41に対する取付角度を変更すると、ヒステリシスばね43が発生する付勢力を変更することができる。
(もっと読む)
アクセル装置
【課題】 アクセルペダルの踏力差を発生するヒステリシス特性を変更可能なアクセル装置を提供する。
【解決手段】 第1ハウジング21と第2ハウジング22とは当接面217bおよび当接面222bにより当接している。取付部217の第2ハウジング22側に形成されている当接面217bは、ボルト12の軸に対して非平行かつ非垂直な斜面となっている。一方、取付部222の第1ハウジング21側に形成されている当接面222bも同様にボルト12の軸に対して非平行かつ非垂直な斜面となっている。ボルト12にナット13を締め込むことにより、取付部217の先端面217cと取付部222の先端面222cとの距離は距離Laから距離Lbに変化する。これにより、第2ハウジング22は第1ハウジング21に対してヒステリシス回転軸41を中心として回転し、ヒステリシスばね43のスプリングセット角度を変更することができる。
(もっと読む)
1 - 20 / 202
[ Back to top ]