
Fターム[3D037FA25]の内容
補機駆動、推進制御及び安全装置 (4,671) | 推進制御装置・安全装置の入力信号 (984) | 車両の他の部品の状態によるもの (339) | ブレーキ装置 (69)
Fターム[3D037FA25]に分類される特許
1 - 20 / 69
車両の制御装置
【課題】運転者の安心感を損なわない範囲で運転の自由度の制限を緩和して、ドライバビリティーを向上することのできる車両の制御装置を提供する。
【解決手段】アクセルペダル4の踏力及び踏力速度からアクセルペダル4の誤踏み込みを判定して、車両の駆動力を低減するコントローラー7は、ブレーキペダル1の踏み位置のずれの傾向を確認するとともに、その傾向に応じて誤踏み込みと判定したときの車両の駆動力の低減幅を可変としている。
(もっと読む)
車両用誤操作防止装置

【課題】本発明は、車両発進時に乗員にブレーキペダル操作を促してブレーキペダル位置を確認させるとともに、乗員がアクセルペダルを誤って踏み込んでしまった場合の意図しない車両の発進を抑制できる誤操作防止装置を提供することを目的としている。
【解決手段】このため、車両用誤操作防止装置において、イグニッション信号検出部とシフトポジション検出部とパーキングブレーキ状態検出部とフットブレーキ状態検出部と警告装置と動力抑制部とを備え、イグニッション信号検出部により検出されたイグニッション信号がONで、動力抑制部を作動させるとともに、シフトポジション検出部により検出されたシフトポジションがPレンジ以外であると判断した時に、フットブレーキ状態検出部によりフットブレーキが操作されていないことを検出した場合には、動力抑制状態を継続したままで警告装置が作動するように制御する制御装置を設けている。
(もっと読む)
ドライバ状態判定装置
【課題】ドライバの意識低下状態を精度よく判定できるドライバ状態判定装置を提供すること。
【解決手段】車両のドライバが意識低下状態であるか否かを判定するドライバ状態判定装置において、車両が車両の前方に位置する先行車に接近しているか否かを判定し(S14)、車両のドライバが無操作状態であるか否かを判定し(S18)、車両のドライバが過去所定時間内に運転操作をしたか否かを判定し(S20)、車両が先行車と接近していると判定され、ドライバが無操作状態であると判定され、かつ、ドライバが過去所定時間内に運転操作をしていないと判定された場合に、ドライバが意識低下状態であると判定する。ドライバの過去の運転操作の有無を加味することにより、ドライバの意識的な先行車への接近を意識低下状態であると誤検出することが抑制される。
(もっと読む)
覚醒度推定装置
【課題】ドライバによるハンドル操作データの周波数特性を取得する際の時間遅れを低減し、短期間の覚醒度低下をも確実に検出する。
【解決手段】現在から過去の25.6秒間のハンドル角データを折り返して未来の25.6秒間のハンドル角データを作成し、この過去の25.6秒の範囲と未来の25.6秒の範囲とを窓関数の区間として、FFT演算を行う。これにより、FFT演算を終了した時点で、窓関数の中心付近のデータすなわち現在付近のデータを重視した覚醒度の推定を行うことができ、過去のデータから周波数成分を算出する従来の手法に比べ、時間遅れの影響を軽減することが可能となる。
(もっと読む)
車両の制御装置
【課題】アクセルとブレーキの両方が踏み込まれた場合にエンジンの出力を制限する出力制限制御を実行する車両において、出力制限制御の実行時の安全性を高める。
【解決手段】アクセルセンサ31とブレーキスイッチ32の出力信号に基づいて、アクセルとブレーキの両方が踏み込まれた状態になったと判断した場合に、エンジン11の出力を制限する出力制限制御を実行する。その際、出力制限制御による車両の急減速の可能性があることを周囲に報知する報知制御としてハザードランプ34を報知動作(例えば点灯又は点滅)させる制御を実行する。これにより、出力制限制御による車両の急減速の可能性がある特殊な状況であることを周囲(例えば後続車両)に気付かせることができ、出力制限制御の実行時に後続車両の追突を未然に防止することができる。尚、車両の運転状態(例えば加速度や車速)に応じて報知制御を実行するタイミングを切り換えても良い。
(もっと読む)
アクセルペダル誤操作対応装置およびアクセルペダル誤操作対応装置用のプログラム
【課題】アクセルペダル誤操作を検出して車両の発進を禁止した後に、アクセルペダルの操作に基づいて発進禁止を解除する技術において、発進禁止を解除してよい場面をより適切に検出する。
【解決手段】アクセルペダル誤操作であると判定したことに基づいて、車両の発進を禁止し、発進が禁止されているとき、解除操作が行われたか否かを判定し、解除操作が行われたと判定したことに基づいて、車両の発進禁止を解除するアクセルペダル誤操作対応装置において、誤操作と判定されたアクセルペダル操作の後(ステップ210)、待機時間経過後に操作量が誤操作判定閾値を超えない範囲でアクセルペダルが再操作されたことに基づいて(ステップ220、230、240)、解除操作が行われたと判定する(ステップ250)。
(もっと読む)
片荷判定装置
【課題】簡素な構成で走行中の車両の片荷状態を正確に判定し得る片荷判定装置を提供する。
【解決手段】片荷判定装置1は、車両20の車幅方向の加速度Gyを検出するGセンサ2(横加速度検出手段)と、車両20のヨーレイトγを検出するヨーレイトセンサ3(ヨーレイト検出手段)と、車両20の車速Vを検出する車速センサ4(車速検出手段)と、ECU6とを備えており、ECU6は、車両20の加速中又は減速中の相異なる複数の車速Vにおけるヨーレイトγの絶対値が全て所定の閾ヨーレートγk以下である場合に、車両20が略平坦な路面を略直進していることを判定するヨーレイト判定部(走行状態判定手段)と、ヨーレイト判定部により車両20が略平坦な路面を略直進していることが判定されている場合に、横加速度Gyに基づいて車両20が片荷状態であることを判定する片荷判定部(片荷判定手段)とを備えている。
(もっと読む)
車両の制御装置
【課題】アクセルとブレーキの両方が踏み込まれた場合にエンジン出力を制限する出力制限制御を実行する車両において、両踏み回転合わせ操作(ブレーキを踏み込みながらアクセルを踏み込んでエンジン回転速度を合わせる操作)を行うことができるようにする。
【解決手段】アクセルセンサ31とブレーキスイッチ32の出力信号に基づいて、アクセルとブレーキの両方が踏み込まれた状態になったと判断した場合に、アクセルとブレーキの両方が踏み込まれた状態になってから所定期間内にエンジン回転速度の変化量ΔNe (例えば今回値と前回値との差)が所定の判定閾値を越えなければ、出力制限制御を実行するが、所定期間内にエンジン回転速度の変化量ΔNe が判定閾値以上になった場合には、無負荷状態でのエンジン回転速度上昇であるため、ヒール・アンド・トゥやダブルクラッチ等の両踏み回転合わせ操作であると判断して、出力制限制御を禁止又は制限する。
(もっと読む)
運転支援装置
【課題】ドライバの運転操作による目標走行経路に対する車両の追従性を向上させることができる運転支援装置を提供する。
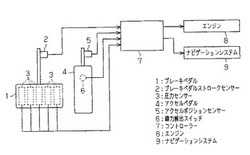
【解決手段】運転支援装置1のECU6は、車両の目標走行経路を生成する目標経路生成部12と、ドライバの体力を判定するドライバ体力判定部13と、ドライバの体力に応じて、アクセルペダルストロークとアクセルペダルアシスト力及びアクセルペダル反力との関係を表すアクセルペダル入出力特性を設定するアクセルペダル特性設定部15と、ドライバの体力に応じて、ブレーキペダルストロークとブレーキペダルアシスト力及びブレーキペダル反力との関係を表すブレーキペダル入出力特性を設定するブレーキペダル特性設定部16とを有している。
(もっと読む)
アクセル・ブレーキ踏み間違い判定装置
【課題】車両のドライバがブレーキを踏むつもりがアクセルを踏んでしまったことを検出する技術において、外部からの衝撃が車両に加えられた場合、または、カーブへの進入時に、従来よりも正確に踏み間違いを検出する。
【解決手段】
車体Gセンサの検出信号に基づいて、車体の前後方向にかかる加速度を取得し、取得した前後方向にかかる加速度から重力加速度の成分を除去し、除去した結果の値を車体前後移動加速度とする(ステップ100)。そして、車体前後移動加速度の絶対値が閾値より大きい場合の方が、小さい場合よりも、同じアクセル開度に対して踏み間違いであるとするアクセル開度の変化量の範囲が広いテーブルを選択し(ステップ110、120、130)、現在のアクセル開度の変化量または現在のアクセル開度を、選択したテーブルに適用することで、アクセルペダルの踏み間違いであるか否かを判定する(ステップ140)。
(もっと読む)
車両運転者の運転能力判定方法及びシステム
【課題】本発明の課題は、運転者の視覚範囲、視覚能力を認識できるシステムを用い、運転者の運転能力を的確に判断し、その運転者に合った運転支援モードを決定する車両運転者の運転能力判定方法及びシステムを提供することにある。
【解決手段】視覚範囲Unが左側に偏っている場合、例えば、自転車の判定用画像10dは見えているが、右からの歩行者の判定用画像10eは見えていない場合がある。このような場合、右側からの対象物に対して特に注意を促すように運転支援モードが決定されるようにすればよい。こうすることで、運転者は自分の現在の状態に合った適切な支援を受けることが可能となり、ひいては安全運転へと繋がり、交通事故の防止効果が高まる。
(もっと読む)
運転疲労度判定装置
【課題】車両を運転する運転者の疲労度を判定する精度を高める。
【解決手段】運転疲労度判定装置1は、例えば道路幅が広い道路から狭い道路へ進入した等の運転者の疲労度が蓄積されると想定される場合と、例えば道路幅が狭い道路から広い道路へ進入した等の運転者の疲労度が回復されると想定される場合との双方を考慮し、運転者の疲労度が蓄積されると判定すると、その単位時間あたりの疲労度を現在の累積疲労度に積算する一方、運転者の疲労度が回復されると判定すると、その単位時間あたりの疲労度を現在の累積疲労度から減算する。
(もっと読む)
坂道発進補助制御装置
【課題】坂道発進補助制御が無用に解除されることを防止できる坂道発進補助制御装置を提供する。
【解決手段】車両が登坂路で停止状態であるときにドライバーがブレーキペダルから足を放しても車両が後退しないように制御する後退防止制御部(S1)と、駆動輪に伝達される駆動トルクを、モータージェネレーターと駆動輪との間に配置される駆動輪側クラッチが解放され始めてから再び締結されて所定時間が経過するまでは駆動輪側クラッチの伝達トルクと変速機への入力トルクとのいずれか小さいトルクに基づいて推定し、所定時間が経過した後は変速機への入力トルクに基づいて推定するトルク推定部(S7,S8)と、推定された駆動トルクが後退防止判定値よりも大きいか否かを判定する判定部(S9)と、推定された駆動トルクが後退防止判定値よりも大きいときには後退防止制御部による制御の中止を許可する後退防止制御中止部(S10)と、を備える。
(もっと読む)
運転者状態推定装置
【課題】より精度の高い運転者の状態推定を行うことができる運転者状態推定装置を提供する。
【解決手段】運転特性の一である攻撃性について分類された3つのクラス毎に運転者の心的負荷の推定に使用する生体情報である特徴量を設定した。そして当該特徴量を変数として使用する重回帰分析を通じて運転者の心的負荷を演算し、その演算結果に基づき運転者の心的負荷レベルを推定するようにした。運転者の運転特性を攻撃性で識別し、その攻撃性のクラス毎で心的負荷の推定に使用する特徴量を使い分けることにより、運転者の心的負荷の推定精度を向上させることができる。運転特性(攻撃性)のより近い同一のクラスに分類された運転者に適した特徴量が使用されて推定が行われるからである。
(もっと読む)
発進制御装置
【課題】ドライバの意図しないタイミングでの電動車両の発進をより確実に防止することを可能にする。
【解決手段】アクセル操作許可受け付け部14がメインスイッチ6およびブレーキペダル9とは別体に設けられており、モータ3の始動準備が完了している場合であっても、アクセル操作許可受け付け部14で操作を受け付けるまでは、モータ3を駆動させるだけの変位が生じないようにアクセルペダル11を機械的に固定するロックを解除しない。
(もっと読む)
車両の異常診断装置
【課題】車両のブレーキとアクセルの同時踏み込み時に駆動源(エンジンやモータ)の出力を制限する出力制限制御を実行するシステムにおいて、出力制限制御の実行中に駆動源の制御システムに異常が発生した場合に、その異常を早期に検出できるようにする。
【解決手段】通常時はアクセルセンサ12で検出した実アクセル開度を異常診断用アクセル開度に設定するが、アクセルセンサ12とブレーキスイッチ13の出力信号に基づいてアクセルとブレーキの両方が踏み込まれていると判断した場合(つまり出力制限制御が実行される場合)には、異常診断用アクセル開度を所定の制限値に設定する。この異常診断用アクセル開度に基づいて異常診断用の出力要求値を算出し、この異常診断用の出力要求値を基準にして設定した異常判定閾値と駆動源11の出力推定値(実際の出力の推定値)とを比較して、駆動源11の制御システムの異常の有無を判定する。
(もっと読む)
車両の制御装置
【課題】車両のブレーキとアクセルの同時踏み込み時の安全性を向上させる。
【解決手段】車両には、アクセル開度を検出するアクセルセンサ12と、ブレーキ操作を検出する2つのブレーキスイッチ13,14を設ける。2つのブレーキスイッチ13,14のいずれか一方がオフ故障すると、運転者がブレーキを踏み込んでも当該オフ故障したブレーキスイッチがオフ状態のまま維持されるが、運転者がブレーキを踏み込むと、故障していない方のブレーキスイッチがオンする。このとき、アクセルセンサ12が所定開度より大きければ、アクセルとブレーキの両方が同時に踏み込まれて出力制限実行条件が成立していると判断して、駆動源11(エンジン及び/又はモータ)の出力を所定値以下に制限する。
(もっと読む)
車両の制御装置
【課題】車両のブレーキとアクセルの両方を踏み込んだ時の安全性とドライバビリティを両立させる。
【解決手段】アクセルセンサ12とブレーキスイッチ13の出力に基づいてアクセルとブレーキの両方が踏み込まれていると判断したときに、駆動源11の出力を制限する出力制限制御を実行する機能を備えた車両において、出力制限制御を実行したくないという運転者の意図を検出する運転者意図検出手段として出力制限禁止スイッチ19を設ける。運転者が出力制限禁止スイッチ19をオン操作したか否かで、運転者が出力制限制御を実行したくないという意図を持っているか否かを判定し、運転者が出力制限制御を実行したくないという意図を持っていると判定されれば、アクセルとブレーキの両方が踏み込まれていても、出力制限制御を実行せず、アクセルセンサ12で検出した実アクセル開度に応じて駆動源11の出力を制御する。
(もっと読む)
車両の退避走行制御装置
【課題】車両走行中の緊急時に車両を安全な場所まで退避走行させる際の安全性・ドライバビリティを向上させる。
【解決手段】運転者が操作可能な位置に退避走行スイッチ11を設ける。車両走行中に何等かの緊急事態が発生して運転者が車両を停車させた方が安全だと感じたときに、運転者が退避走行スイッチ11をオン操作すると、退避走行用リレー20と電子スロットル用リレー21がオフされて、車両走行モードが退避走行モードに切り替えられる。これにより、電子スロットル装置18の電源をオフして、スロットル開度を退避走行用スロットル開度まで閉じることで、エンジン17の出力を低下させて、車両駆動力を抑制し、車両を退避走行させる。退避走行中も、エンジン17の運転を継続することで、パワーステアリング装置及びブレーキ装置を運転者がハンドル操作可能で且つ退避走行中のブレーキ力を確保する。
(もっと読む)
車両
【課題】運転者が通常通りに車両を走行させていても起こり得る異常が発生した場合でも、ブレーキペダルを踏み込むことにより、エンジン回転数をアイドリングに低減させると共に、車両を制動し、結果、車両を確実に停止させることができる車両を提供すること。
【解決手段】車両1は、運転者が通常通りに車両1を走行させていても起こり得る異常、具体的には、第2伝達棒107がリンク106から外れる異常が発生して、意に反した車両の走行によって運転者がパニック状態になっても、ブレーキペダルを反射的に踏み込むことにより、ポテンショメータ108から出力される踏込信号を遮断することができる。よって、運転者が通常通りに車両1を走行させていても起こり得る異常が発生した場合でも、エンジン回転数をアイドリングに低減させると共に、車両1を制動し、結果、車両1を確実に停止させることができる。
(もっと読む)
1 - 20 / 69
[ Back to top ]