
Fターム[3D041AC00]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、構造 (6,089)
Fターム[3D041AC00]の下位に属するFターム
Fターム[3D041AC00]に分類される特許
161 - 180 / 281
エンジン制御装置、及び鞍乗型車両
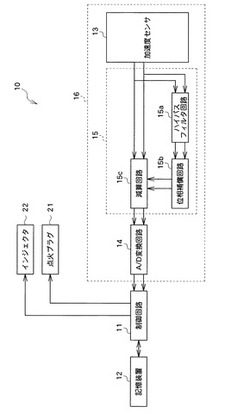
【課題】車両のジャンプ時にエンジン回転数の上昇を効果的に抑制できるエンジン制御装置を提供することにある。
【解決手段】エンジン制御装置10は、加速度センサ13から入力される信号に基づいて、車体の上下方向における重力加速度の加速度成分を検知する加速度検知装置16と、検知される加速度成分に基づいて、車両がジャンプしたか否かを判定する制御回路11とを備える。制御回路11は、車両がジャンプしたと判断した場合に、エンジン回転数の上昇を抑制するための処理を行う。
(もっと読む)
車両用制御装置

【課題】走行目標に対する実車両の追従性を向上させることができる、車両用制御装置の提供を目的とする。
【解決手段】目標軌跡や速度パターン等の走行目標に応じて走行する車両の運動状態をモデル化した動的車両モデルに基づいて、実車両100の操作に必要な操作量を変化させる操作量と運動状態量を算出するとともに、算出された操作量と運動状態量が実車両100に対する所定の走行要求を満たせるか否かを判断し、前記走行要求を満たせると判断された操作量と運動状態量のそれぞれを、フィードフォワード(FF)操作量と状態フィードバック(FB)制御における目標状態量として設定する、車両用制御装置。
(もっと読む)
衝突回避支援装置及びそれを搭載した車両
【課題】自車の推定進路内に占める障害物の大きさと障害物との相対速度に基づいて介入開始タイミングを変化させ、安全性を損なうことなく介入操作による運転者に対する違和感を低減することができる衝突回避支援装置の提供。
【解決手段】介入タイミング算出手段103は、前方障害物との距離情報と前方障害物と自車との相対速度情報とから前記介入制御を開始する介入予定タイミングを算出する。進路余裕度算出手段112は、自車の走行する予定進路にある前方障害物の横方向の大きさと位置情報から前方障害物が自車の推定進路内を塞ぐ大きさを算出し、介入タイミング補正手段104は、前記進路余裕度算出手段112で算出した推定進路内を塞ぐ大きさによって前記介入予定タイミングを補正して介入開始タイミングを決定する。
(もっと読む)
車両の運動制御装置
【課題】左右転舵時の走行性の走行感度向上と安定性向上御を両立させる車両の運動制御装置を提供する。
【解決手段】車体スリップ角算出部35で車体スリップ角βを、規範スリップ角算出部36aで規範スリップ角βmを算出する。車体スリップ角に対して規範スリップ角βmにもとづいてフィードフォワード制御が行なわれ、規範スリップ角βmと車体スリップ角βとの偏差にもとづいて、フィードバック制御が行なわれ、転舵角補正量δcとして加算部40bに入力され、目標転舵角δtが補正される。規範ヨーレート算出部37aで規範ヨーレートγmが算出される。また、ヨーレートに対して、規範ヨーレートγmにもとづいてフィードフォワード制御が行なわれ、規範ヨーレートγmとヨーレートγとの偏差にもとづいて、ヨフィードバック制御が行なわれ、ヨーモーメントMZとしてDYC制御部37kに入力される。DYC制御部37kは、駆動力配分量を決定する。
(もっと読む)
自動車を操縦するための方法および配置
走行方向で自動車(1)前方にある地面から画像情報が把握され、これらの画像情報から走行方向および/または走行速度を変化させるための操縦命令が作り出される自動車を操縦するための方法を用いて、農業用自動車の画像情報に基づき、目立つ対象構造(3)が選択され、繰り返し自動車(1)と目立つ対象構造(3)との間の距離(a)が求められ、操縦命令が、対象構造に対応する画像情報から、および自動車と対象構造との間の距離変化から、作り出される自動車を操縦する方法。 (もっと読む)
車両の運転支援装置
【課題】前方障害物の状態に応じて適切な回避動作を行い自然で確実な接触回避を行う。
【解決手段】制御ユニット7は、回避制御のONの際、自車両1との接触可能性があると判定した対象立体物に対し、対象立体物が静止状態とみなせる場合、この対象立体物に他の立体物が隣接して存在しない場合には、電動パワーステアリング制御装置12に電動パワーステアリング出力電流Imを出力して自動操舵による回避を行わせる一方、対象立体物に他の立体物が隣接して存在する場合には、自動ブレーキ制御装置13に減速信号を出力して自動ブレーキによる回避を行わせる。また、対象立体物が移動状態とみなせる場合には自動ブレーキ制御装置13に減速信号を出力して自動ブレーキによる回避を行わせる。
(もっと読む)
車両用運転支援システム
【課題】 同乗者の乗り心地を向上させる。
【解決手段】 車両の加速度が加速度判定値未満になるようにスロットルバルブの開度及び制動装置等を制御する。これにより、車両が発信した際に車両の乗員に対して必要以上の慣性力が作用しないので、同乗者の乗り心地を向上させることができる。
(もっと読む)
内燃機関制御装置
【課題】自動変速機を介して車両の駆動輪に駆動力を伝達すると共に吸気バルブのバルブリフト量を可変とする可変動弁機構を備えた車両用内燃機関において減速操作時の車両走行エネルギーの回収効率を高める。
【解決手段】燃料カット時で(S100でyes)バッテリに充電可能である場合は(S102でyes)、変速比を大きくしている(S108)。この時、車両走行エネルギーにより駆動輪は回転されるが、この駆動輪回転は変速比を大きくしない場合に比較して、より高速にクランクシャフトを回転させる。したがってオルタネータをより高速に回転でき、より多量の回転エネルギーを電気エネルギーとしてバッテリに蓄積できる。しかもエンジンブレーキ力が小さくなる方に吸気バルブのバルブリフト量を調節する(S106)ので、より多くの回転エネルギーがバッテリに蓄積できることになる。こうして課題が達成される。
(もっと読む)
車両のヨーモーメント制御装置
【課題】 車両の運動状態を制御する主操作部材の操作性とヨーモーメント発生装置の作動を制御する副操作部材の操作性とを両立させる。
【解決手段】 車輪を転舵するステアリングホイール7(主操作部材)のステアリングホイール本体8の一部に回転可能なグリップ9(副操作部材)を設ける。グリップ9を回転させると左右の車輪の制動力に差が発生し、それに伴うヨーモーメントで旋回を補助あるいは抑制することができる。グリップ9をステアリングホイール本体8の一部として構成したので、ステアリングホイール7を操作して車両を旋回させながら、グリップ9を回転させて旋回を補助あるいは抑制することができ、このときステアリングホイール本体8およびグリップ9は共に運転者の同じ手で操作可能であるため、運転者の操作負担が軽減される。
(もっと読む)
車両の制御装置
【課題】「或る制御手段による制御対象の基本制御」と「他の制御手段による基本制御を修正する修正制御」との制御干渉を抑制すること。
【解決手段】この装置は、車両の制御対象の基本制御量を決定するための演算を行う1つ又は複数の第1制御部A11〜A1iを有し前記第1制御部の演算結果に基づいて前記基本制御量を決定する第1制御手段A1を備えた第1制御ユニットU1と、前記基本制御量の修正に使用される前記制御対象の修正制御量を決定するための演算を行う1つ又は複数の第2制御部A21〜A2jを有し前記第2制御部の演算結果に基づいて前記修正制御量を決定する第2制御手段A2を備えた前記第1制御ユニットとは独立した第2制御ユニットU2とを備える。前記基本制御量に基づく基本制御と前記修正制御量に基づく修正制御とが制御干渉し得る場合、前記第1制御部の全て又は一部の制御機能を停止する。
(もっと読む)
車両の車輪トルク推定装置及び制振制御装置
【課題】 種々の車両の走行、運動又は制駆動力制御等に於いて参照される車輪トルクを推定する際、推定が良好に実行できない事情を考慮して車輪トルクの推定値を生成する車輪トルク推定装置又は手段を提供すること。
【解決手段】 本発明の車両の車輪トルク推定装置又は手段に於いては、車輪のスリップの程度が大きいほど車輪トルク推定値の絶対値が小さくなるよう車輪トルク推定値が補正され、車輪が後転しているときには、車輪トルク推定値を負の値として算出する。上記の如く補正される車輪トルク推定値は、車両の駆動力を制御して車体の制振を行う制振制御装置のトルク入力値として有利に用いることができる。
(もっと読む)
車両の走行制御装置
操舵制御手段、制駆動力制御手段、接地荷重制御手段を備えた車両に於いて、演算負荷や消費エネルギの増大を抑制しつつ各制御手段の制御量を最適化し、車両の走行運動を最適に制御する。
【解決手段】車両が緊急の走行運動制御を必要とするときには(440、450)、全ての制御手段についての評価関数を演算して車両全体の目標走行運動制御量を全ての制御手段に配分することにより各制御手段の目標制御量を演算し(700)、車両が緊急の走行運動制御を必要としないときには、車両の走行状態に基づいて特定の制御手段の目標制御量を演算し、特定の制御手段の目標制御量に基づいて特定の制御手段の制御による車両の物理量の変化量を演算し、車両全体の目標走行運動制御量及び車両の物理量の変化量に基づいて他の制御手段の目標制御量を演算する(500、600)。
(もっと読む)
車両の進行方向推定装置及び運転支援システム
【課題】車両の速度ベクトルを算出することで、現時点における車両の進行方向を推定することのできる車両の進行方向推定装置、及び、これを用いた運転支援システムを提供する。
【解決手段】演算部110は、前後加速度センサ20及び横加速度センサ30によって検出される加速度を所定の周期でそれぞれサンプリングして前後加速度Ax(n)及び横加速度Ay(n)を取得する。また、演算部110は、記憶部120に記憶保持されている速度ベクトルV(n−1)及びヨーレートセンサ40のセンサ出力値βに基づいて速度ベクトルVpreを算出するとともに、この速度ベクトルVpreの各成分Vx_pre及びVy_preに、前後加速度Ax(n)と所定時間Δとの積及び横加速度Ay(n)と所定時間Δtとの積をそれぞれ加算することで速度ベクトルV(n)を算出する。
(もっと読む)
車両運動制御装置
【課題】
舵角制御機構とトルク制御機構の作動量を好適に配分する車両運動制御装置を提供する。
【解決手段】
運転者のハンドル操作によらず前輪の舵角を制御可能な舵角制御機構と、後輪のトルクを左右独立に制御可能なトルク制御機構を備えた車両運動制御装置において、車両が規範ヨーレートに基づく運動となるように、舵角制御機構とトルク制御機構の作動量を決定するヨーモーメント配分決定手段を備える。このヨーモーメント配分決定手段は、前後輪のタイヤ摩擦円の余裕度合やヨーモーメントの目標値の周波数成分などに応じて舵角制御機構とトルク制御機構のヨーモーメント配分を決定する。
(もっと読む)
ステアリングシステムの安全方法
【課題】ステアリングシステムの安定性と有効性を増加させると同時に、誤動作を起す可能性の検出を増やし、またはそうした誤動作をより早く検出することで、車両の安全性を高める方法を提供する。
【解決手段】不安定度と潜在的に危険な誤動作を検出する電動ステアリング支援を備えた自動車ステアリングシステムの監視用安全方法に関する。これは、ステアリング列の量を少なくとも一回測定し調整することを決定するステップと、ダイナミックドライブシステム40の量を少なくとも一回測定し調整することを決定するステップと、前記決定した各量を比較して、その信憑性を確認するステップと、前記決定した各量が基準の各量から過剰な偏差を有する状態で動作し、前記ステアリングを安全な状態にするステップと、を備える。
(もっと読む)
車輌の制御装置
【課題】車輌の挙動の急変を回避しつつ制御量が異常な値になった場合に異常な制御量に基づいて不適切な制御が長く継続されることを防止する。
【解決手段】転舵角可変装置24により左右前輪の舵角を適正に制御することができない異常が生じたときには(S220)、目標転舵角Δδtの大きさが各サイクル毎に漸次減少するよう目標転舵角Δδtが漸減処理され(S270)、目標転舵角Δδtが異常な値であるときには(S240)、推定目標転舵角Δδthの大きさが各サイクル毎に漸次減少するよう推定目標転舵角Δδthが漸減処理され(S250)、推定目標転舵角Δδthが目標転舵角Δδtに設定され(S260)、推定目標転舵角Δδthの漸減の速さは目標転舵角Δδtの漸減の速さよりも高く、推定目標転舵角Δδthは目標転舵角Δδtよりも速やかに漸減される。
(もっと読む)
車両挙動制御装置
【課題】セルフアライニングトルクとほぼ同じ位相関係にある実路面反力トルクを用いて駆動力制御量を求めることで、初期不安定状態においても適切な駆動力制御が実現され、車両の安定性や旋回性を向上させることができる車両挙動制御装置を得る。
【解決手段】車速を検出する車速検出手段と、操舵角又は実舵角を検出する舵角検出手段と、タイヤと路面の間に発生する実路面反力トルクを検出する実路面反力トルク検出手段と、車速と舵角と舵角に対する路面反力トルクの勾配とから基準路面反力トルクを演算する基準路面反力トルク演算手段を備え、検出した前記実路面反力トルクと前記基準路面反力トルクに基づいて駆動力調整装置の駆動力制御量を決定する。
(もっと読む)
車両運動制御方法および車両運動制御装置
【課題】 コスト増や運転の違和感を伴うことなく、ヨーレートの制御精度の向上を図ることができる車両運動制御方法および車両運動制御装置を提供する。
【解決手段】 ヨーレートγを検出するヨーレートセンサと、ヨー角加速度推定値dγhatに基づいて、ヨーレートγhatを推定する積分器102jと、ヨーレート操作量と、ヨーレート検出値γとヨーレート推定値γhatとの偏差であるヨーレート偏差(γ-γhat)と、このヨーレート偏差の積分値と、に基づいて、ヨー角加速度dγhatを推定するヨー角加速度推定部102と、目標ヨーレートtγとヨーレート検出値γとヨー角加速度推定値dγhatとに基づいて、ヨーレートの目標応答を満たすヨーレート操作量(フィードバック前輪舵角操作量δfFB,フィードバック後輪左右駆動力差操作量uFB)を演算するF/B指令部103と、を備える。
(もっと読む)
車両挙動制御装置
【課題】 車両のロール振動の発生を精度良く検出し適切にロール振動の発生を抑制できる車両挙動制御装置を提供すること。
【解決手段】 車両挙動制御装置1は、車両の横力を、スリップ角及び接地荷重の少なくとも一方を変数とした非線形の関数として演算し、その演算した横力と、少なくとも車両のロール角、ヨー角、上下変位と、に基づいて車両におけるロール振動の発生の有無を判断すると共に、その判断の結果ロール振動が発生すると判断された場合、ロール振動を抑制する。
(もっと読む)
車両運動の安定化制御装置
【課題】 強いオーバーステア特性により高い旋回性能を得つつ、安定限界速度以上の車速において、車両の旋回特性および直進性の安定化を図ることができる車両運動の安定化制御装置を提供する。
【解決手段】 車速が安定限界速度Vc以上の場合、左右駆動力差に対して、運動特性の不安定性を補償するための安定化フィードバック操作代usを設定する安定化フィードバック操作代演算部105と、安定化フィードバック操作代usの範囲内で、ヨーレートγをフィードバック制御で安定化するための安定化フィードバック操作量uFBを設定するF/B指令部108と、安定化フィードバック操作量uFBの限界量(ulmax,urmax)に対して、安定化フィードバック操作代usを確保した上で、車両を安定に走行させるための安定化フィードフォワード操作量uFFrl,uFFrrを設定するF/F指令部107と、を有する。
(もっと読む)
161 - 180 / 281
[ Back to top ]