
Fターム[3D041AC00]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、構造 (6,089)
Fターム[3D041AC00]の下位に属するFターム
Fターム[3D041AC00]に分類される特許
101 - 120 / 281
駆動力制御装置
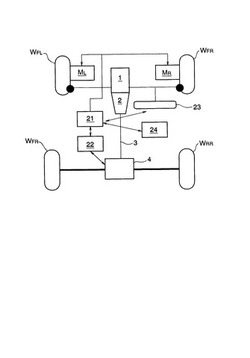
【課題】制御応答性がよく、車両の挙動を安定させることのできる駆動力制御装置を提供する。
【解決手段】前後左右の四輪WFL,WFR,WRL,WRRを備えた車両の駆動力制御装置において、主動力源1が出力した動力を前後いずれか一方の左右輪WRL,WRRに分配するとともにそれらの左右輪に対する動力の分配率を係合機構を係合あるいは解放させることにより変更する機械式分配機構4と、前後いずれか他方の左右輪WFL,WFR毎に設けられかつこれらの左右輪の駆動力を個別に制御する少なくとも二つのモータML,MRとを備えている。
(もっと読む)
車両用障害物検出装置

【課題】交差路において歩行者などの障害物との衝突を有効に回避することが出来るように障害物を検出する車両用障害物検出装置を提供する。
【解決手段】本発明は、交差路に設置された反射鏡に写る障害物の像を利用して障害物を検出する車両用障害物検出装置であって、交差路に設置される反射鏡を検出する反射鏡検出手段と、反射鏡に写る障害物の像を検出する障害物像検出手段と、検出された障害物の像からその障害物の反射鏡への接近度を算出する障害物接近度算出手段と、接近度に応じて警報システム及び/又は安全システムを制御するシステム制御手段と、を有する。
(もっと読む)
タイヤ位置可変車両およびタイヤ力変化抑制方法
【課題】 タイヤ移動に伴うタイヤ発生力の変動を抑制し、運転者の運転操作に応じた車両挙動を実現できるタイヤ位置可変車両およびタイヤ力変化抑制方法を提供する。
【解決手段】 タイヤユニット300を移動させる際、タイヤ390の移動に伴う車両挙動変化を抑制するように、転舵アクチュエータ340を制御するタイヤ力変化抑制装置510を備える。
(もっと読む)
車両用運転支援装置
【課題】本発明は、運転者に障害物との衝突を回避させるため障害物を検出した際に警報等を行なう車両用運転支援装置において、運転者の運転支援装置への依存度を、精度よく推定することができる車両用運転支援装置を提供することを目的とする。
【解決手段】判定対象物に対して運転者が衝突回避行動を開始した時の、差分距離D、差分時間TD、及び車両速度Vを検出して記憶し、この記憶された各データを時系列に並べて、差分距離Dの相関度、差分時間TDの相関度、及び車両速度Vの相関度から、運転者の運転支援装置への依存度を判定するようにしている。
(もっと読む)
障害物判定装置および方法、並びに障害物判定装置を備えた車両
【課題】対象物が車両の先端部もしくは側面に衝突する可能性を判定する。
【解決手段】車両20の前方にある物体50を撮像するカメラ101と、物体50までの距離を計測するレーダ102を用いる。そして、カメラ101を車両20の任意の位置101Vに仮想的に移動したときの方位を演算する。その方位に変化がないとき、仮想的に移動したカメラの位置101Vに物体50が衝突する可能性が大であると判定する。
(もっと読む)
車両の操舵制御装置
【課題】少なくともヨー方向の運動状態量偏差に基づく修正舵角により操舵輪の舵角を修正するカウンタステア制御を行う操舵制御装置において、車輪の横すべりが発生し易い状況にて修正舵角を適切に決定し得るものの提供。
【解決手段】左右の前後力差ΔFXに基づいて第1修正舵角θ1が決定される。運動状態量偏差(ヨーレイト偏差)に基づいて第2修正舵角θ2が決定される。前輪に対するカウンタステア制御に基づく修正舵角θmuspは(θ1+θ2)に設定される。路面の平均的な摩擦係数μ、又は旋回状態量TC等に基づいて、低μ路面上の走行時、或いはステアリングホイール操作がなされている場合に第2修正舵角θ2が小さめに修正・制限される。これにより、アンダーステア時において、第2修正舵角θ2により前輪舵角が旋回内側に増加する方向に修正されることが抑制され得る。
(もっと読む)
車両用運転支援装置
【課題】障害物との衝突を効率よく回避することができ、信頼性の高い車両用運転支援装置を提供する。
【解決手段】障害物検出用カメラ2で障害物を検出してその障害物Bまでの距離と衝突回避に必要な横移動量とを算出する。これらと、タイヤ状態センサ3や路面μセンサ4、ブレーキ踏み量センサ10、舵角センサ11、ヨーレートセンサ12を用いて算出される最大減速度及び最大横加速度とから操舵回避限界及び制動回避限界を求める。この操舵回避限界及び制動回避限界に基づいて制動アシスト及び操舵アシストの開始タイミングを算出し、自動ブレーキアクチュエータ7と操舵アシストアクチュエータ6を効率よく組み合わせて制御する。
(もっと読む)
車両用制御装置
【課題】駆動力または制動力の配分によって車両の走行安定性を高める車両用制御装置において、走行安定性を高める制御が阻害されないようにする。
【解決手段】マイコン10に含まれる目標前輪横力設定部12は、舵角θと車速Vと前輪荷重Ffzとに基づき目標前輪横力Fftを決定し、これに車両の実前輪横力Ffyが一致するようFB制御演算部16は指令値Dcを算出し配分装置駆動回路20に与える。これにより生じる後輪前後力Frxは後輪前後力センサ6により検出され、抑制量演算部38はこの値に基づき抑制量Asを算出し、減算器34は目標転舵角Atからこれを差し引く。転舵比演算部36はこれを転舵比に変換して転舵比可変装置駆動回路40に与える。このことにより車両の転舵が抑制されるので、上記配分により前輪が横滑りしやすくなることがなく、走行安定性を高める制御などが阻害されない。
(もっと読む)
走行支援装置
【課題】
従来技術では、目標スペースに安全に車線変更できるスペースがなければ、車線変更するための車両の誘導ができない、という課題がある。
【解決手段】
走行支援装置は、車線変更の支援を開始する支援開始部と、自車と他車の相対距離及び相対速度を検出する検出部と、当該相対距離及び相対速度に基づいて自車が車線変更した時の衝突危険度を他車に対して算出する算出部と、相対距離,相対速度及び衝突危険度に基づいて車線変更の可否を判断する第1の判断部と、車線変更できない場合、相対距離及び相対速度に基づいて車線変更する目標スペースを決定する決定部と、目標スペースに車線変更できるスペースがあるか否かを判断する第2の判断部と、スペースがない場合、車線変更待機位置へ向けて目標速度を設定し、スペースがある場合、車線変更可能位置へ向けて目標速度を設定する設定部と、自車の速度が目標速度となるように制御する制御部を備える。
(もっと読む)
走行制御装置
【課題】フィードバック制御によって車両の走行制御を行う場合により高精度な走行制御を行うことができる走行制御装置を提供することを課題とする。
【解決手段】走行計画に従って走行するようにフィードバック制御によって車両を走行制御する走行制御装置1であって、走行計画における目標軌跡の位置毎に重視する制御項目を決定する制御項目決定手段41と、この決定された重視する制御項目の制御ゲインを他の制御項目より高くする制御ゲイン決定手段41と、この決定された制御ゲインを走行計画に組み込む走行計画補正手段41とを備えることを特徴とする。
(もっと読む)
走行路判定装置および車両走行制御装置
【課題】車両が走行している走行路を確実に判定することができる走行路判定装置および制駆動トルク発生装置や車両に過大な負荷がかかることを抑制することができる車両走行制御装置を提供すること。
【解決手段】駆動トルクを車両Cに作用させるエンジン100および制動トルクを車両Cに作用させるブレーキ装置200を車両Cの車速Vが予め設定された目標車速Voとなるように制御することで自動走行制御を行う車両走行制御装置1−1は、自動走行制御が行われている場合に、車両Cに駆動トルクを作用させるために算出された目標駆動トルクEToおよび車両Cに制動トルクを作用するために算出された目標制動トルクBToに基づいて車両Cが走行している走行路が走行の困難な走行困難路であるか否かを判定する。車両Cが走行している走行路が走行困難路であると判定されると、自動走行制御を終了する。
(もっと読む)
車両の駆動力制御装置
【課題】AYC(左右輪駆動力配分手段)及びTCL(駆動力制御手段)を備えた車両において、直進走行時におけるAYC及びTCLの制御を適正化し、走行安定性を向上させることのできる車両の駆動力制御装置を提供すること。
【解決手段】AYC用ECU(28)の駆動力移動量演算部(42)と、TCL用ECU(30)のエンジン制御部(60)とを接続し、当該TCL用ECUによりエンジントルク抑制制御を行う際には、AYC用ECUは駆動力移動量演算パラメータを極低μ路面モードに切り替え、駆動力移動量を抑制する。
(もっと読む)
車両の挙動制御装置
【課題】制御量に対する制御指標の不感帯を適正なものとし、車両の挙動制御の向上を図った車両の挙動制御装置を提供する。
【解決手段】目標挙動設定手段により設定された目標挙動γtと挙動検出手段により検出された実挙動γrとの偏差の相関値Δγが制御指標とされ、挙動制御手段により挙動調整機構は該制御指標に応じて求めた制御量TR/Dに基づき制御されるが、該挙動制御手段は、制御指標の0値近傍に不感帯を有しており、該不感帯の所定幅|γDZ|を、車速VBが第1所定値V1未満の低車速域では該第1所定値V1以上第2所定値V2未満の中車速域よりも広く設定するとともに、車速VBが第2所定値V2以上の高車速域でも上記中車速域よりも広く設定する。
(もっと読む)
車両制御装置
【課題】電動パワーステアリング装置等のタイヤに発生する力を測定可能な装置から得られる車両の走行状態情報を用いて車両挙動を制御する場合に、各走行制御装置おいて車両の挙動を連続的に制御することのできる車両制御装置を得る。
【解決手段】電動パワーステアリング制御装置8が、実路面反力トルク検出器15と、ハンドル操舵角検出器18と、車速検出器11と、規範路面反力トルク演算手段19と、実路面反力トルク信号及び規範路面反力トルク信号に応じて車両の走行状態を判定する車両挙動判定手段21と信号出力手段(通信手段)30を備え、車両挙動判定結果だけでなく、その元信号である実路面反力トルク信号及び規範路面反力トルク信号をあわせて他の走行制御装置に出力することにより、制御量の変動がステップ的にならず、連続的な制御となり、運転者に違和感を与えない。
(もっと読む)
車両用ヨーレイト制御装置
【課題】運転者の違和感が無いか少ないヨーレイト制御を可能とする。
【解決手段】衛生からの信号に基づき自車位置を検出する走行地検出部75と、道路の旋回半径等の属性が記憶された道路属性記憶部77と、検出された自車位置及び記憶された道路の属性とから自車が走行しようとする道路の属性を判断する道路属性判断部63と、判断された道路の属性に基づき自車の予測ヨーレイトを設定する予測ヨーレイト設定65と、自車のヨーレイトを変更可能なヨーレイト変更部19,21と、自車の旋回走行を検出する旋回走行検出部62と、自車の旋回走行の検出に基づいて前記ヨーレイト変更部19,21を予測ヨーレイトが実現されるように制御するヨーレイト制御部61とを備えたことを特徴とする。
(もっと読む)
車両用運転操作支援装置、および車両用運転操作支援方法
【課題】障害物を回避するための最適な操作支援タイミングを決定すること。
【解決手段】マイクロプロセッサ5は、自車の周囲に存在する障害物の位置を検出し、自車の走行路上の位置および自車の速度を検出し、検出した障害物の位置と、検出した自車の走行路上の位置および速度とに基づいて、自車が障害物を回避するために必要な操作量を時系列で予測する。そして、予測した予測操作量に基づいて、障害物を回避するための操作支援が必要か否かを判定し、操作支援が必要であると判断した場合に、操作支援を行う。
(もっと読む)
走行制御装置
【課題】より安全なウェット走行を可能とする走行制御装置を提供する。
【解決手段】自車水抵抗減速度算出部131は、ドライ走行データ取得部111が取得したドライ走行データとウェット走行データ取得部112が取得したウェット走行データとの差分から、路面上の水の抵抗により自車両が減速する度合である自車水抵抗減速度を算出し、車線保持走行計画生成部151は、路面が湿潤状態のときに、自車水抵抗減速度算出部131が算出した自車水抵抗減速度に基づいて自車両の走行計画を生成する。このため、路面上の水の状態に基づいて自車両をより安全にウェット走行をさせることが可能となる。
(もっと読む)
安全運転支援方法、車載端末装置、及び運転支援プログラム
【課題】
ドライバの運転操作性を損なうことなくドライバが危険な運転を行おうとした場合には安全運転支援を行う。
【解決手段】
予防安全装置120、130が作動した時、或いは予防安全装置120、130を作動させる車輪速センサ121、ヨーレートセンサ122、ブレーキ圧センサ123のセンサ値が予め設定した閾値を越えた場合に、坂道、非舗装道路、カーブ、駐車場、交差点などの走行場所と、絶対時間、降雪情報、降雨情報、外気温などの走行環境と、車両速度などの車両状態とを車両端末110内の記憶部に記憶しておき、車両が記憶された走行場所を記憶された走行環境下と車両状態で走行しようとした場合に、車載端末110はドライバへの警告通知または車両減速制御によって安全運転支援を行う。
(もっと読む)
車線内走行支援装置、自動車および車線内走行支援方法
【課題】運転者に与える違和感を防ぎつつ、車線内走行を支援すること。
【解決手段】自動車1は、車線内走行支援のための操舵反力による運転者への報知と、車輪の転舵制御あるいは各車輪の制動制御による車線内走行支援制御あるいは車線逸脱防止制御とが、それぞれ異なる条件で実行される。また、進路にあたる道路の状況に応じて、制御に用いる横変位(即ち、現在の横変位あるいは将来の横変位)を切り換えて車線内走行支援制御が行われる。そのため、進路にあたる道路状況に応じて、運転者への報知動作と車両挙動に影響が現れる車両制御動作との整合を図りながら、車線内走行支援のための制御を行うことができる。したがって、道路状況が直線路あるいは曲線路のように異なる場合であっても、運転者に与える違和感を防ぎつつ、車線内走行を支援することが可能となる。
(もっと読む)
走行制御装置
【課題】運転者が安全確認を怠っていた場合でも、安全性を確保した走行制御を行うことができる走行制御装置を提供する。
【解決手段】運転者注意レベル設定部106は、周囲状況と走行状態とに応じて運転者が払うべき注意の度合を設定し、運転者注意レベル検出部108は、運転者が周囲状況及び走行状態に払っている注意の度合を検出し、アクチュエータ制御部120は、運転者注意レベル検出部108が検出した運転者が払っている注意の度合が、運転者注意レベル設定部106が設定した運転者が払うべき注意の度合よりも低いときに、各アクチュエータを動作させて運転者に対する注意喚起、自動車の減速等の対応を行うため、自動車の周囲状況及び走行状況に応じて運転者が払うべき注意を払っていないときは、自動車の減速等の安全措置をとることができる。
(もっと読む)
101 - 120 / 281
[ Back to top ]