
Fターム[3D041AC00]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、構造 (6,089)
Fターム[3D041AC00]の下位に属するFターム
Fターム[3D041AC00]に分類される特許
41 - 60 / 281
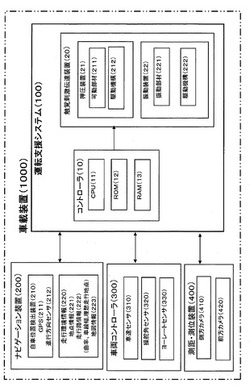
運転支援装置及び運転支援方法
【課題】運転負荷を加重させることなく、乗員に与える触覚刺激により運転支援情報を伝達する。
【解決手段】所定タイミングにおける車両の走行地点及び車速を含む走行状態を取得する走行状態取得機能と、各地点と走行路の環境とが予め対応づけられた走行環境を参照し、車両の走行状態に基づいて、車両とその車両の乗員の仮想注視点との離隔度を算出するとともに、その離隔度を含む所定離隔領域における車両の将来走行位置を算出する将来走行位置算出機能と、走行環境を参照し、将来走行位置を走行する際の理想走行位置を取得し、この理想走行位置に対する将来走行位置の偏差に基づいて、車両の誘導量を算出する誘導量算出機能と、算出された誘導量に応じた触覚刺激を含む運転支援情報を乗員に与えさせる情報伝達機能と、を実行するコントローラ10を備える。
(もっと読む)
車両の駆動力制御装置及びその方法

【課題】主駆動輪のスリップ時に従駆動輪を最適に制御することである。
【解決手段】車両の駆動力制御装置は、主駆動輪がスリップしたらモータの駆動によって従駆動輪を駆動するものであり、主駆動輪の駆動力とモータ4の駆動によって駆動される従駆動輪の駆動力との加算値として車両総駆動力を算出し(ステップS690)、車両総駆動力の増加方向に主駆動輪のスリップ状態を制御する(ステップS700、ステップS710、ステップS720)。
(もっと読む)
車両挙動制御装置
【課題】走行中にドアが開いてしまった場合に、フェールセーフ動作が可能な車両挙動制御装置を提供する。
【解決手段】車両のドア6の開閉を検出する検出手段7Bと、ヨーレートを発生させる挙動デバイス4L、4Rと、前記検出手段7Bが前記ドア6の開放を検出した場合に、前記車両に、前記ドア6の開放方向と反対方向の慣性力が発生するように、前記挙動デバイス4L、4Rを制御する制御手段8と、を備えることを特徴とする車両挙動制御装置である。
(もっと読む)
動力装置
【課題】左右の被駆動部の回転を容易に精度良く制御できることで、ドライバビリティを向上させることができる動力装置を提供する。
【解決手段】動力装置1では、互いの間で動力を伝達可能で、動力の伝達中、互いの間に回転数に関する共線関係を保ちながら回転し、その速度共線図において順に並ぶように構成された第1要素S1、第2要素C1、R3、第3要素R1、R2、C3、第4要素C2、S3および第5要素S2はそれぞれ、第1回転機11の第1ロータ13、左右の被駆動部WFL,WFRの一方、原動機3の出力部3a、左右の被駆動部WFL,WFRの他方、および第2回転機21の第2ロータ23に機械的に連結され、第3回転機31の第3ロータ33は、原動機3の出力部3aに機械的に連結されており、第1回転機11と第3回転機31、および、第2回転機21と第3回転機31はそれぞれ、互いに電気的に接続されている。
(もっと読む)
車両制御装置とブレーキ電子制御装置と電動パワーステアリング装置
【課題】車両が搭載するバッテリの消耗を低減した車両制御装置等を実現することを目的とする。
【解決手段】車両に搭載されたバッテリ800を用いて車両を電気的に制御する車両制御装置100において、検知した車両状態に基づき車両の制御の迅速性が必要ではないと判断される場合に、バッテリ800の電流消費を低減するように、制御の通電量を抑制する車両制御装置100とする。好ましくはホイールシリンダを増圧する増圧弁を通電制御して要求制動力に対応する液圧を供給するブレーキ電子制御装置においては、検知した車両の状態に基づき要求制動の迅速性が必要ではないと判断される場合に、増圧弁への通電量を抑制するブレーキ電子制御装置とする。
(もっと読む)
運転操作支援装置及び運転操作支援方法
【課題】運転者の運転操作の意図や自車両の周囲環境に適していない制御介入がなされることによって制御介入に対し運転者が違和感を感じることを防止する。
【解決手段】車両制御コントローラ12が、障害物に車両1が接触することを回避するための車両1の走行経路を回避経路として算出し、運転者の運転状態の危険度と車両1の走行環境の危険度とに基づいて算出された回避経路を自車両が走行するために必要な自車両の制御量を補正し、補正された制御量に従って車両1の走行状態を制御する。このような構成によれば、運転者の状態と車両1の周囲環境の危険度の両方を考慮して運転者の運転操作を支援することができるので、制御介入に対し運転者が違和感を感じることを防止できる。
(もっと読む)
車両接地面摩擦状態推定装置及びその方法
【課題】タイヤの摩擦限界に対する余裕度をより適切に推定する。
【解決手段】車両状態推定装置は、接地面において前記車輪のセルフアライニングトルクと前記車輪のスリップ度との比である入力を設定するためのタイヤスリップ角演算部43、セルフアライニングトルク演算部45及びセルフアライニングトルク−スリップ角比演算部46と、その入力を基に、車輪のグリップ特性を示すグリップ特性パラメータである出力を決めるためのトルク勾配演算部48及びμ勾配演算部49を備える。
(もっと読む)
ハイブリッド車両
【課題】短時間で停止状態から車両の走行を開始させることができるハイブリッド車両を提供することにある。
【解決手段】内燃機関及び電気モータと、駆動輪と、複数の変速段及び入力軸を備え、入力軸と駆動輪とを係合させることが可能な変速機構及び、内燃機関の機関出力軸と入力軸とを係合させることが可能なクラッチを含み、入力軸が、電気モータのロータとも係合している変速機と、出力を変化可能な補機と、各部の動作を制御する制御手段と、を有し、制御手段は、停止状態から発進する場合に、クラッチを半係合状態とし、電気モータの回転数を低下させた後に、複数の変速段のいずれか1つを係合状態とし、その後、電気モータの駆動力を駆動輪に伝達させることで上記課題を解決する。
(もっと読む)
エンジン制御装置
【課題】この発明は、エンリッチ制御を働かせるエンリッチ条件を、成立させ難く、あるいは、その成立を遅延させるよう制御し、その制御のために付加する検知装置類を少なく、あるいは、なくして、既存のエンジン補機の利用効率を高めるようにし、通常運転での走行と特定運転条件下での走行の両方での触媒保護を行うことを目的とする。
【解決手段】この発明は、エンジン制御装置において、エンジン制御手段にエンリッチ制御領域が第1マップより狭い第2マップを設け、エンジン制御手段は、エンジンの温度が設定温度より高く、かつ車両速度が設定速度より低い特定運転条件下では、第2マップを選択してファン装置を駆動するよう制御するとともに燃料噴射制御すること特徴とする。
(もっと読む)
車両運動制御装置及びプログラム
【課題】ドライバに与える違和感を少なくし、かつ、障害物を回避した自動運転を実現することができる
【解決手段】障害物回避ポテンシャル関数演算手段24によって、現在の目標到達点と障害物との相対位置に基づいて、障害物回避のためのポテンシャル関数を演算する。目標車両運動演算手段30によって、目標追従のためのポテンシャル関数、及び演算された障害物回避のためのポテンシャル関数の和である車両制御ポテンシャル関数に基づいて、現在の車両の進行方向と目標到達点へ向かう方向との偏角及び現在の車両の位置と目標到達点との相対位置における車両制御ポテンシャル関数の勾配を演算し、車両制御ポテンシャル関数の勾配に基づいて、目標車両運動を演算する。車両運動制御手段32によって、演算された目標車両運動を実現するように、操舵装置及び加減速装置を制御する。
(もっと読む)
車両の制御装置
【課題】車輪相互間の差回転を適切に制御すると共に、車輪と路面の間のグリップ力を適切に監視してタイヤのグリップ力を最適に維持しながら摩擦円を使い切る効率の良い最適な制御を行う。
【解決手段】ドライバ要求に基づき車輪に発生するタイヤ力と車輪に現在発生しているタイヤ力を基にタイヤ力の摩擦円からのオーバー量をオーバータイヤ力Foverとして演算し、このオーバータイヤ力Foverが+の場合、このオーバータイヤ力Fover分のトルクToverを減じるようにエンジン制御部39に信号出力する。また、オーバータイヤ力Foverと、車体速と各車輪速との差回転を演算し、オーバータイヤ力Foverとこの差回転に基づいてブレーキ駆動部25に信号出力して各輪を制動制御する。
(もっと読む)
車両の制御装置
【課題】路面状態に応じた走行モードの切替中におけるドライバビリティの悪化を防止し、かつ、従来の車両に低コストで追加可能な、動力分配機構と連携した電子制御を行う車両の制御装置を提供すること。
【解決手段】ECUのCPUは、走行モードの入力があった場合(ステップS13でYes)、入力された走行モードに応じて動力分配機構の切替を指示し(ステップS14)、動力制御機構については、記憶した走行モードに応じて制御を行う(ステップS15)。動力分配機構の切替が完了したと判定した場合には(ステップS16でYes)、入力された走行モードに応じて、動力制御機構の特性を切り替えるが、動力分配機構の切替を指示してから、切替が完了しないまま一定の時間が経過したと判定した場合には(ステップS18でYes)、動力制御機構の特性を、記憶した走行モード(ステップS12)に対応する特性に維持する(ステップS19)。
(もっと読む)
車両の制御装置
【課題】車輪速センサの故障時に差動装置を過度な負荷から保護することができる車両の制御装置を提供する。
【解決手段】駆動制御ECUは、車輪速センサの故障時において、エンジン回転数センサおよびモータジェネレータの回転数センサから入力される信号に基づき、差動装置の入力回転数RevFinを算出する(ステップS11)。そして、差動装置の入力回転数RevFinが、差動装置において許容される左右の車輪の回転数差から求められる上限値を超えないよう、駆動力発生装置を制御する(ステップS13)。
(もっと読む)
障害物回避支援装置
【課題】障害物回避性能の更なる向上を図ることができる障害物回避支援装置を提供する。
【解決手段】障害物回避支援装置は、車輪の制動力を制御することによりアンダーステアを抑制するアンダーステア抑制制御部23と、車輪の制動力を制御することによりオーバーステアを抑制するオーバーステア抑制制御部22とを有する制動力制御装置1と、車両前方の障害物を検知し該障害物との接触を回避する操舵操作を支援する回避操作支援制御部42を有する電動パワーステアリング装置2と、を備える。回避操作支援制御部42が、車両前方の障害物を検知し該障害物との接触を回避する操舵操作を支援するように作動しているときには、アンダーステア抑制制御部23のゲインを通常時よりも高くし、オーバーステア抑制制御部22のゲインを通常時よりも低くする。
(もっと読む)
周辺車両監視装置及び周辺車両監視方法
【課題】交通事故の発生をより高い確率で抑止し、運転者のストレスを低減する。
【解決手段】自車両と先行車両との間に一定の車間距離があり、自車両の隣接車線を走行する周辺車両が自車両の斜め前方を走行している状況において、周辺車両の挙動から該当周辺車両が自車両と先行車両との間に割り込みを行うと予測される。そして、運転者に対して割り込みの可能性が報知されるとともに先行車両との車間距離を更に取る様にアドバイスされ、状況によっては自車両の制動制御が自動的に行なわれる。この様にして、周辺車両の微妙な挙動から起こりうる危険な状況を予測して未然に回避することによって、運転者の交通事故回避に対するストレスを軽減させ、交通事故の防止を図ることができる。
(もっと読む)
車両用操舵装置
【課題】制駆動を伴う低速時の転舵に必要な力を低減する。
【解決手段】キングピン軸の下方向きの延長線と、キングピン軸に対応する転舵輪の接地面との交点が、転舵輪のタイヤのトレッド面よりも車両の車幅方向内側に位置するように構成され、操舵時に転舵輪WFL,WFRがキングピン軸を中心として回動することで中立位置から移動するように構成された懸架装置を備えた車両用操舵装置であって、車両の旋回時に、旋回方向内側となる転舵輪が中立位置から移動する移動量と、旋回方向外側となる転舵輪が中立位置から移動する移動量と、を求め、これらの移動量の比または差に応じて、それぞれの転舵輪に加える制駆動力を制御するようにした。
(もっと読む)
車両運転支援装置
【課題】運転者による車両の運転操作度合のみならず、車両の安全走行の観点から、車両の運転を適当に支援することができる装置を提供する。
【解決手段】車両運転支援装置10によれば、運転者による車両1の運転操舵度合Ddが低いほど支援閾値THが低く設定される。そして、車両の安全走行のために必要な車両1の運転支援量Spが支援閾値TH_Sp以下であることを要件として、操舵装置11および制動装置12のうち一方または両方の動作が制御される。これにより、車両1の運転操作度合Ddが低くても、車両1の運転支援の必要性が低い場合には操舵装置11等の動作が制御される確率が低くなる。その一方、運転操舵度合Ddが高くても、車両1の運転支援の必要性が高い場合には操舵装置11等の動作が制御される確率が高くなる。
(もっと読む)
走行支援装置
【課題】運転者が違和感や恐怖感を覚えることを抑制できる運転支援装置を提供する。
【解決手段】運転者の注視点を設定し、その注視点に基づいて走行軌道を設定する。一般的に、コーナーを走行する際には、運転者はコーナー出口付近を注視しつつ操舵を行なう。従って、運転者の注視点を設定し、注視点に基づいて走行軌道を設定すると、その走行軌道は、運転者が自分で操舵した場合の走行軌道に近い軌道となることから、運転者が違和感や恐怖感を覚えることを抑制できる。
(もっと読む)
車線逸脱防止制御装置
【課題】突発的な外乱が生じた場合であっても車線逸脱を防止できる車線逸脱防止制御装置を提供する。
【解決手段】自車両の走行車線からの逸脱を防止するよう操舵機構10に操舵力を付与する車線逸脱防止制御ユニット100を、走行車線に対する自車両の横速度を検出する横速度検出手段140と、走行車線内に設定した目標横位置Xcと自車両の横位置Xeとの偏差ΔXを積分することにより、走行車線からの逸脱を防止する方向へ第1の操舵力を設定する第1の操舵力設定手段(偏差制御操舵力算出手段)130と、横速度に基づいて走行車線からの逸脱を防止する方向へ第2の操舵力を設定する第2の操舵力設定手段(横速度制御操舵力算出手段)150と、第1の操舵力と第2の操舵力に基づいて目標操舵力を設定する目標操舵力設定手段160と、操舵機構に操舵力を付与する操舵力制御手段170とを備える構成とする。
(もっと読む)
ハイブリッド車両
【課題】電気モータのロータが入力軸に係合する変速機構において、当該入力軸に対応するクラッチを係合状態にしたまま、変速段を切替える動作を行うことが可能なハイブリッド車両の制御技術を提供する。
【解決手段】ハイブリッド車両1のECU100は、第2変速機構40において現在、係合状態にある変速段である現変速段から、第2変速機構40において新たに係合状態にする変速段である新変速段に切替える場合、機関出力軸8から第2入力軸28に伝達されたトルクを打ち消すよう、電気モータ50により当該トルクとは逆向きのトルクを第2入力軸28に作用させて、第2変速機構40において現変速段を解放状態にする解放動作を行わせ、その後、第2入力軸28の回転速度が、車速と新変速段に基づいて設定された目標回転速度となるよう、内燃機関5及び電気モータ50を協調して作動させて、解放状態にある新変速段を係合状態にする係合動作を行わせる。
(もっと読む)
41 - 60 / 281
[ Back to top ]