
Fターム[3D041AD01]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、入力信号 (10,144) | 推進装置、エンジン (3,466)
Fターム[3D041AD01]の下位に属するFターム
機関軸回転数、出力 (992)
スロットル弁開度 (588)
アイドリング回転数 (21)
エンジン負荷 (35)
気筒数 (4)
燃料供給、燃料噴射 (49)
アクセルペダル、レバーの踏込量、操作量 (1,357)
始動 (58)
エンジン温度 (188)
エンジンブレーキ (27)
Fターム[3D041AD01]に分類される特許
141 - 147 / 147
車両用駆動装置の制御装置

【課題】 駆動装置を小型化できたり、或いはまた、燃費が向上させられる車両用駆動装置を提供するとともに、その車両用駆動装置の制御時にショックが抑制される制御装置を提供する。
【解決手段】 係合装置(切換クラッチC0或いは切換ブレーキB0)を備えることで、変速機構10が無段変速状態と有段変速状態とに切り換えられて、電気的に変速比が変更させられる変速機の燃費改善効果と機械的に動力を伝達する歯車式伝動装置の高い伝達効率との両長所を兼ね備えた駆動装置が得られる。また、変速機構10の無段変速状態から有段変速状態への切換えのために切換クラッチC0或いは切換ブレーキB0が係合されるときに、トルク低減制御手段84によりエンジントルクTE、および/または第1電動機M1および/または第2電動機M2の出力トルクの少なくとも一つが低減されるので、無段変速状態から有段変速状態への切換えに伴う切換えショックが抑制される。
(もっと読む)
動力出力装置およびこれを搭載する自動車並びに駆動装置,動力出力装置の制御方法

【課題】 変速機の変速比の変更に必要な電力を確保して変速比の変更を適正に行なう。
【解決手段】 シフトレバー81がBレンジに操作されたときに高車速になるほどエンジン22が高い回転数に調整されるようモータMG1でエンジン22をモータリングすると共に他のレンジ(Dレンジ等)に操作されたときよりも低車速側で変速機60の変速比が変更(ダウンシフト)されるよう設定された低車速側変速線マップを用いて変速比を変更する。したがって、Bレンジへの操作時に車速に応じた適切なエンジンブレーキを作用させながら変速機60の変速比を変更する際にはモータリングによるモータMG1の消費電力を小さくすることができる共に変速比の変更に必要なモータMG2の消費電力を小さくできる。この結果、変速機60の変速比の変更に必要なモータMG2の電力を確保することができ、変速比の変更をより適正に行なうことができる。
(もっと読む)
出力増加を行う連続可変トランスミッションシステム
モータ(22)を有する連続可変トランスミッションへの出力を増加させる方法が提供される。連続可変トランスミッションは、エンジン(12)によって作動される。この方法は、モータ(22)の加速度が加速度しきい値を超えた場合にエンジン(12)の定常状態出力定格よりも高くなるように、エンジン(12)の出力を選択的に調整するステップを含む。  (もっと読む)
(もっと読む)
ハイブリッド車両の制御装置
【課題】 エンジンクラッチの締結状態に係わらず応答性の高い走行制御を達成可能なハイブリッド車両の制御装置を提供すること。
【解決手段】 エンジンと少なくとも1つのモータによる複数の動力源と、締結要素と、エンジンクラッチを有する差動歯車変速機とを備え、前記締結要素及び前記エンジンクラッチの締結・解放の組み合わせにより複数の走行モードを達成するハイブリッド車両の制御装置において、前記締結要素の解放により無段変速比を達成しつつ前記モータの駆動力のみで走行するときは、前記エンジンクラッチを解放すると共に、前記エンジンクラッチに接続された遊星歯車列の回転メンバの目標回転数を所定回転数以下として制御する。
(もっと読む)
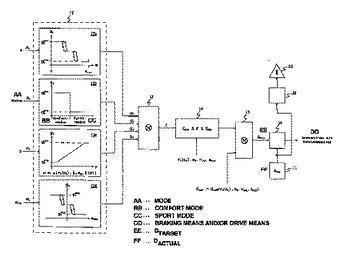
車間距離制御を行う方法及び装置
本発明は、車両内で距離を制御する方法及び装置に関する。本発明に従って、車両と前方走行車両との間の距離を表す距離変数の実際値(dact)が測定される。 さらに、距離変数のための複数の重み付け値(gi)が、車両の運転状況及び/又は車両の周囲状況及び/又は運転者の運転動作を表す入力変数(xi)に従って決定される。前記重み付け値から、距離変数のための設定値(dsetp)が決定され、これにより、車両の制動手段及び/又は駆動手段が、距離変数の測定実際値(dact)が決定設定値(dsetp)をとるよう制御される。本発明は、重み付け値(gi)を共に掛け合わせて、距離変数の設定値(dsetp)を決定することを特徴とする。
 (もっと読む)
(もっと読む)
車両の長手方向の移動を制御する方法
本発明は、特に長手方向移動制御システムを用いて、車両(3)の長手方向の移動を制御する方法に関する。閾値速度を超える車速については、前方走行車両(8)が検出されない場合は、車速はより高い選択された設定速度に調整され、前方走行車両(8)が検出された場合は、この前方走行車両(8)からの距離が調整される。車両が閾値速度未満の速度で走行している場合は、前方走行車両(8)が検出された場合にのみ、車両(3)の長手方向の移動が制御される。この結果、車間距離制御システムが、比較的大きい速度範囲に渡って実施され得る。 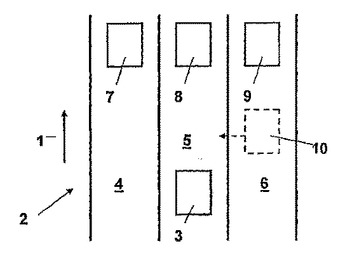 (もっと読む)
(もっと読む)
追従間隔制御を改良する方法
【課題】
追従間隔制御の快適性と安全性を向上させること。
【解決手段】
車両の追従間隔制御システムを改良する方法では、追従間隔制御の制動圧要件に車両の電子式制動制御システムのシステム制御が比較的にゆっくりな速度で行われるので、最高圧力増加率或いは減少率は超過しない。代用として、制動圧積分によりあらかじめ制動制御の計画が行なわれる。 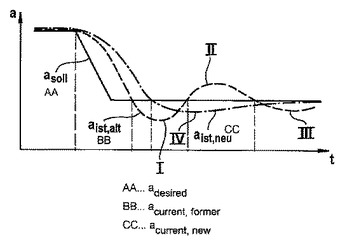 (もっと読む)
(もっと読む)
141 - 147 / 147
[ Back to top ]