
Fターム[3D041AF01]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、制御方式 (1,637) | フィードバック制御 (916)
Fターム[3D041AF01]に分類される特許
61 - 80 / 916
電動車両の制御装置
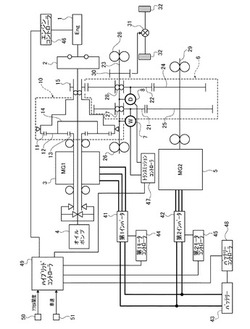
【課題】走行シーンに応じて駆動力制御と変速制御の間で適切に優先付けすることで、走行シーンにかかわらずシステム保護と運転性向上のバランスを図ることができる電動車両の制御装置を提供すること。
【解決手段】電動機を含む複数の動力源と、電気無段変速機10と、摩擦クラッチ7を有する機械有段変速機6と、駆動力制御手段と、機械有段変速機6の変速制御手段と、を備えている。このハイブリッド車両において、駆動力の増減情報と車速の増減情報を取得し、駆動力指令と変速指令の同時出力時であり、かつ、駆動力と車速のうち少なくとも一方が増加する場合、駆動力制御より変速制御を優先する制御を行い、駆動力指令と変速指令の同時出力時であり、かつ、駆動力と車速のうち少なくとも一方が減少する場合、変速制御より駆動力制御を優先する制御を行う駆動力/変速協調制御手段を設けた。
(もっと読む)
衝突安全装置

【課題】本発明は、障害物が存在するエリアを走行する場合でも円滑な走行を可能とする衝突安全装置を提供することを課題とする。
【解決手段】障害物と衝突の可能性のある部位Bに衝突吸収構造を有する移動体に搭載される衝突安全装置1であって、移動体の周辺の障害物を検出する障害物検出手段10,31と、障害物検出手段10,31で障害物を検出した場合に減速制御を行う制御手段33とを備え、制御手段33は、減速制御を行うときの速度の制御値を少なくとも移動体の障害物との衝突部位Bの衝撃吸収性能に応じて設定することを特徴とする。
(もっと読む)
車両の駆動制御装置
【課題】クルーズコントロールの制御時にも簡単な演算処理により通常制御時と同じ内容の制御入力を通常制御時と同じ制御系の同じ位置(最上流位置)に入力してエンジンのスロットル開度の制御およびトランスミッションの変速制御を行なう。
【解決手段】クルーズコントロールの制御時、擬似アクセルペダル開度演算部93により、目標出力演算部92の目標出力P*に対応する擬似アクセルペダル開度θa*を、特性マップG1、G2と、車速センサ3の検出車速Vとに基づき、目標トルクと回転数の積が目標出力P*となるアクセルペダル開度から逆引き演算して簡単に算出する。さらに、スイッチ8により、制御入力としてのアクセルペダルの開度を、検出アクセルペダル開度θaから擬似アクセルペダル開度θa*に切替え、擬似アクセルペダル開度θa*と検出車速Vとに基づく目標スロットル開度θt*にしたがってエンジンスロットル6を制御する。
(もっと読む)
制駆動力制御装置
【課題】モードの切り替えにより生じる制動力または駆動力の変化を、一層確実に抑制することのできる制駆動力制御装置を提供する。
【解決手段】アクセルペダルの操作量またはブレーキペダルの操作量のいずれか一方を用いて、車両で発生する駆動力および制動力を求める第1モードと、アクセルペダルの操作量から駆動力を求め、かつ、ブレーキペダルの操作量から制動力を求める第2モードとを相互に切り替えることのできる制駆動力制御装置において、第2モードから第1モードに切り替える条件が成立した際に、アクセルペダルの操作量が所定値を超えると、第2モードから第1モードに切り替えて、アクセルペダルの操作量から駆動力および制動力を求めるモード切替手段(ステップS2ないしS6)を備えている。
(もっと読む)
車両制御装置
【課題】横風を受けている場合に、その横風により生じるヨーモーメントを所望の大きさに制御することにより、車両の実挙動を目標挙動に近づける。
【解決手段】車両が横風を受けている場合に、ヨーモーメントを横力で割った値である比率xの目標比率x*を、実際の車両の挙動が目標挙動となる大きさに決定する。横風は、車両の形状で決まる着力点に作用するため、横風の強さに基づけば横風によって車両に作用する横風ヨーモーメントを取得することができる。そして、アクチュエータが、横風の強さと目標比率x*とを掛けた値である目標ヨーモーメントから横風ヨーモーメントを引いた値である制御ヨーモーメントが付与されるように制御される。その結果、車両の実挙動を目標挙動に近づけることができる。
(もっと読む)
車両の走行制御装置
【課題】 現在普及している車両にすぐにでも適用でき、緊急地震速報を受信したときに適切な車両走行制御を行い、緊急地震速報によって生じることが懸念されているパニックを抑制することができる、車両の走行制御装置を提供する。
【解決手段】 緊急地震速報を受信し、地震対応制御を行う場合において、アクセルペダル操作量APが増加するときは、その増加方向の変化量が減少する(増加速度が減少する)ようにアクセルペダル操作量APが補正され、補正アクセルペダル操作量APCが算出される。補正アクセルペダル操作量APCに応じてエンジンのスロットル弁開度を制御するスロットルアクチュエータ31の駆動制御が行われる。ブレーキペダル操作量BP及びステアリングホイールの操舵角STについても、ほぼ同様の処理により補正ブレーキペダル操作量BPC及び補正操舵角STCが算出される。
(もっと読む)
車両の自動操舵制御装置
【課題】車両を目標走行線に追従させるための操舵角修正が頻繁になることを防止すると共に乗り心地を快適に維持する車両の自動操舵制御装置を提供する。
【解決手段】道路に配置された指標から自車が走行するべき目標走行線を設定して自動操舵を行う車両の自動操舵制御装置であって、各タイヤにタイヤ圧力センサを備え、各サスペンションに該サスペンションを駆動するサスペンションアクチュエータを備え、上記各タイヤのタイヤ圧力の関数で定義される操舵安定状態量が所定値となるように上記各サスペンションアクチュエータを制御するコントローラを備える。
(もっと読む)
車両の運転支援装置
【課題】道路の状況に応じて適切にオートクルーズコントロールを実施することができる運転支援装置を提供する。
【解決手段】少なくとも1つの駆動源により走行可能な車両の運転支援装置は、自車両の現在位置に基づく走行区間情報を取得する走行区間情報取得部と、前記走行区間情報に対応する他車両の走行情報を取得する他車両情報取得部と、前記他車両の走行情報に基づいて判定値を設定する判定値設定部と、前記判定値に基づいてオートクルーズコントロールの実施を判定するオートクルーズコントロール実施判定部と、を備える。
(もっと読む)
車両の挙動制御装置
【課題】車輪に前後振動を与えることによる車輪の摩擦係数の増大効果を利用して、車両の制動停止距離を好適に短縮化する。
【解決手段】車輪の接地荷重を可変とし得るアクティブサスペンション機構400を備えた車両10において、ECU100は、アンチロック制御を実行する。当該制御においては、車両10が急制動状態にある場合に、アクティブサスペンション機構400により車両10に上下方向の振動が与えられる。一方、ECU100は、スリップ率SLが基準値を超えたタイミングと、車両振動が開始されたタイミングとに基づいて、タイヤμを最大とし得るピークスリップ率SLpkを推定するピークスリップ率SLpkが推定されると、ABS閾値がこのピークスリップ率SLpkに基づいて書き換えられる。
(もっと読む)
四輪駆動車およびその制御方法
【課題】4WDモード時におけるアクセルペダル操作のフィーリングを向上可能な四輪駆動車およびその制御方法を提供する。
【解決手段】四輪駆動車は、2WDモードと4WDモードとを切替えて走行可能である。2WDモード時はエンジンにより前輪が駆動され、4WDモード時はモータによりさらに後輪が駆動される。4WDモード時は、エンジンの出力を用いてオルタネータにより発電し、モータへ電力が供給される。そして、エンジンECUは、4WDモード時、2WDモード時よりも同一のアクセルペダル操作量に対するエンジンのスロットル開度が小さくなるように、2WDモード時に対してアクセルペダル操作量とスロットル開度との関係を変更する。
(もっと読む)
車両制御装置
【課題】走行制御の追従性の向上を図ることのできる車両制御装置を提供すること。
【解決手段】車両1の走行制御を行う運転支援制御を運転支援制御部69で実行する際に、道路状態取得部70で取得した道路の状態より目標軌跡演算部72で仮の目標軌跡を生成し、仮の目標軌跡より、走行抵抗であるコーナリングドラッグを走行抵抗推定部71で推定する。さらに、このコーナリングドラッグを利用して、目標軌跡演算部72で将来の目標軌跡を生成する。このため、生成する目標軌跡と実際の車両1の走行時の走行軌跡とのずれを低減することができ、車両1の走行制御を、車両1の実際の走行に沿った制御に近づけることができる。これにより、運転支援制御時における車両1の挙動のフィードバック量を低減させることができる。この結果、運転支援制御により車両1の走行制御を行う際の制御の追従性の向上を図ることができる。
(もっと読む)
隊列走行制御システム
【課題】隊列を構成する各車両の走行性能を反映させた走行制御により、スムーズな隊列走行を実現することができる隊列走行制御システムを提供する。
【解決手段】隊列走行制御システム1は、複数の車両が隊列を形成するように車両の走行制御を行う隊列走行制御システムであって、各車両の加速度指令値u1〜u5は、評価関数Jを最小にするように決定され、評価関数Jは、車両間の相対関係に関する値と、車両ごとにそれぞれ重み付けεu1〜εu5がされた各車両の目標加速度指令値u1〜u5に関する値と、に基づいて算出され、上記重み付けεu1〜εu5は、それぞれの車両の加減速応答性を示す時定数T1〜T5に応じて決定される。
(もっと読む)
車両用駆動装置の制御装置
【課題】運転者に違和感を与えないようにしてベルト式無段変速機の可変プーリの偏磨耗を防止することができる車両用駆動装置の制御装置を提供する。
【解決手段】安定走行時制御手段162は、安定判定条件判断手段160により無段変速機18の変速比γ1が予め定められた安定判定条件を満足すると判断された場合には、その判断時を基準にエンジン回転速度NEに対する駆動輪回転速度NWHの比率を保つように前進用クラッチC1をスリップさせると共に変速比γ1を上記判断時よりも高車速側に変化させる変速比変更制御を実行し、更に、その変速比変更制御の実行による駆動力変化を打ち消すようにエンジン12の出力を制御する駆動力安定制御を実行する。従って、入力側可変プーリ42及び出力側可変プーリ46の偏磨耗を防止し、変速比γ1の変化が運転者に違和感を与えないようにすることができる。
(もっと読む)
車両用衝突回避装置
【課題】 自車および物体の予測される衝突の態様に応じて的確な回避制御を行う。
【解決手段】 物体検知手段M1が他車を検知し、走行状態検出手段M2が自車の走行状態を検出すると、相対関係算出手段M3が自車に対する物体の相対関係を算出する。衝突可能性判定手段M4が前記相対関係に基づいて自車が他車に衝突する可能性を判定し、衝突可能性が高いと判定された場合には更に他車との衝突が予測される自車の衝突部位と、自車の移動方向および他車の移動方向が成す交差角と、自車が他車に衝突すると予測される衝突予測時刻とを算出する。衝突回避制御手段M5は、衝突予測時刻以前に前記衝突部位および前記交差角に基づいて自車の姿勢を変化させて衝突を回避するので、自車の他車に対する衝突を効果的に回避することができる。
(もっと読む)
走行経路生成装置、走行経路生成方法、及び運転操作支援装置
【課題】適切な走行経路を迅速に出力する。
【解決手段】マイクロコンピュータ9が、障害物Oが取り得る移動軌跡の候補を複数生成し、生成された移動軌跡の各候補について、障害物Oが移動軌跡に沿って動いた場合に自車両1が障害物Oに接触することを回避可能な自車両1の走行経路を算出し、算出された複数の走行経路の中から最適な走行経路を選択する。
(もっと読む)
車両挙動制御装置
【課題】 運動状態検出センサの故障時等における車両挙動の乱れを抑制した車両挙動制御装置を提供する。
【解決手段】 ヨーレイトFB値設定制御を開始すると、ATTS−ECU16は、ステップS21で実ヨーレイトγrealと規範ヨーレイトγrefとの差Δγを算出する。次に、ATTS−ECU16は、差Δγの絶対値|Δγ|に基づき、ステップS22でヨーレイト差−ゲインマップからヨーレイト制御ゲインGyを検索/設定する。次に、ATTS−ECU16は、ステップS23で実ヨーレイトγrealと規範ヨーレイトγrefとに基づきヨーレイトFBベース値YRbaseを設定した後、ステップS24でYRbaseにヨーレイト制御ゲインGyを乗じることによってヨーレイトFB値YRfbを設定/出力する。
(もっと読む)
車両用運転操作補助装置、車両用運転操作補助方法および自動車
【課題】運転者に対し、より適切に車両の運転操作のための情報を伝達すること。
【解決手段】本発明に係る自動車では、情報伝達制御手段が、運転者に入力される上下方向の動きを、リスクポテンシャルの大きさに応じて抑制して運転者に伝達し、リスク伝達手段が、リスクポテンシャルの大きさに応じて、操作反力付与手段における反力を付与する。
(もっと読む)
車両制御装置
【課題】 坂路における車速制御の応答性を高めることができる車両制御装置を提供する。
【解決手段】 各車輪FL,FR,RL,RRに制動力を発生させるホイルシリンダW/Cと、路面の勾配を検出するコンバインセンサ33と、路面勾配に応じた駆動力を演算し、設定された制御目標速度になるように前輪FL,FRに対して駆動力を作用させる速度制御中であって、路面勾配とは別の路面状態(路面μ)に応じて演算された制動力を発生させ、車輪の回転速度を制御する液圧ユニット31と、液圧ユニット31をコントロールするブレーキCU32と、を備えた。
(もっと読む)
車両挙動制御装置
【課題】 アクチュエータの作動遅れを補償するとともに、走行状態に適した応答性を実現できる車両挙動制御装置を提供する。
【解決手段】 ATTS−ECU16は、ステップS23で車速Vに所定の車速係数Kvを乗じて車速補正値Fcvを算出した後、ステップS24で路面μに所定のμ係数Kμを乗じてμ補正値Fcμを算出する。次に、ATTS−ECU16は、ステップS25で、フィルタ周波数ベース値Fbに対して車速補正値Fcvを減じるとともにμ補正値Fcμを加えることにより、可変ローパスフィルタ63のフィルタ周波数Ffを設定する。これにより、フィルタ周波数Ffは、車速Vが高くなるほど低くなり、路面μが高くなるほど高くなる。
(もっと読む)
車両挙動制御装置および車両挙動制御方法
【課題】 運転者の意図する旋回挙動を実現できる車両挙動制御装置および車両挙動制御方法を提供する。
【解決手段】 車両の左右後輪に対して左右独立に駆動力を付与可能な駆動力配分制御装置と、各輪に対し独立して制動力を付与可能なブレーキ制御装置と、車両挙動(ヨーレイト)を検出する目標ヨーレイト算出部307と、検出された車両挙動に基づいて車両のアンダーステアとオーバーステアを判断する車両挙動状態判断部310と、車両挙動状態判断部310の判断結果に応じて駆動力を増加し、駆動力配分制御装置を制御する駆動力制御部(駆動力配分算出部311,目標エンジントルク算出部313)およびブレーキ制御装置を制御する目標制動力算出部312と、を備えた。
(もっと読む)
61 - 80 / 916
[ Back to top ]