
Fターム[3D041AF01]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、制御方式 (1,637) | フィードバック制御 (916)
Fターム[3D041AF01]に分類される特許
21 - 40 / 916
走行制御装置
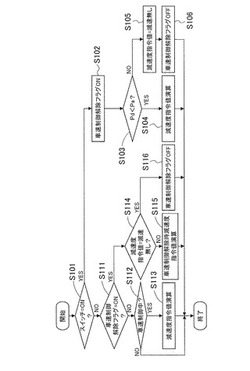
【課題】車速制御中にドライバーによりブレーキペダルのペダル操作が行われたときに、ドライバーに違和感を与えることなく、車速制御を解除することができる走行制御装置を得ること。
【解決手段】車速制御手段により車速を減速させる制御中にドライバーによりブレーキペダル112のペダル操作が行われた場合に、ペダル操作によりマスタシリンダ111で発生されるドライバーブレーキ液圧Pdと、車速制御部131の減速度指令値Aに基づいてブレーキアクチュエータ121で発生されるアクチュエータブレーキ液圧Paとを比較して、ドライバーブレーキ液圧Pdがアクチュエータブレーキ液圧Paを上回るまで、車速制御部131からの減速指令値Aの出力を継続する。
(もっと読む)
車両の制振制御装置

【課題】走行状況に応じた制振トルクを算出することが可能な車両の制振制御装置を提供する。
【解決手段】車輪に制駆動トルクを発生させる制駆動トルク発生手段と、車輪速に基づいて車両のバネ上振動を抑制するような第1補正トルクを算出する第1補正トルク算出手段と、制駆動トルクに基づいて車両のバネ上振動を抑制するような第2補正トルクを算出する第2補正トルク算出手段と、走行状態に基づいて前記第1補正トルクと前記第2補正トルクに所定の重み付けをした補正トルク指令値を算出し、前記制駆動トルク発生手段に出力する入力信号処理手段と、を備え、車輪速に基づいて車両のバネ上振動を抑制するような第1補正トルクと、制駆動トルクに基づいて車両のバネ上振動を抑制するような第2補正トルクとに、走行状態に基づいて所定の重み付けを行う。
(もっと読む)
車速制御装置
【課題】未知の負荷変動に対する応答性に優れた車速制御装置を提供すること。
【解決手段】目標駆動力(目標エンジン出力PeT )が、典型的なエンジン回転速度フィードバック制御にカスケードされた車速フィードバックから演算される。目標車速VT および実車速VR の偏差に基づく第1のフィードバック量FD1と、要求車速VS 及び実車速VR の偏差に基づく第2のフィードバック量FD2との加算値に基づいて、より大きな目標駆動力が演算される。第2のフィードバック量FD2は、要求される応答を実現するフィルタ(一次応答モデル、レートリミッタ等)によって要求車速を演算し、次いで、その要求車速と実車速を比較することで得られる。未知の負荷変動に対してエンジン出力の非常に迅速な補償を自動的に行い、車速を精度良く制御する。
(もっと読む)
制動制御装置
【課題】車両が停止する直前に車両の減速度を低下して車両の揺り戻しを抑える制御において、上り坂で車両がずり下がってしまう可能性を低減することを目的とする。
【解決手段】車両が上り勾配道路において減速した場合t2〜t3に、車両の減速に伴いゼロに近づくブレーキ要求車軸トルク65を算出して揺り戻しを低減する。またその後の開始タイミングt3において、ブレーキ要求車軸トルク65の初期値B0、最終値B1、および補正期間tdを決定し、当該開始タイミングt3から補正期間tdの間、ブレーキ要求車軸トルクを初期値B0から最終値B1まで低下させる。また、車輪速センサ7の検出信号に基づいて検出した車両の検出車速が最後に検出限界最小車速Vc以上だった限界時刻t3以前における検出車速の変化に基づいて、車両の実車速がゼロになる停止時刻t4を推定し、上記開始タイミングt3から当該停止時刻t4までの期間を補正期間tdとする。
(もっと読む)
走行制御装置
【課題】車車間通信により目標車間距離変化パターンのデータを受信した車両における乗員の乗り心地の悪化を抑制することができる走行制御装置を提供する。
【解決手段】走行制御装置は、まず目標車間距離を時間経過に従って短くするように変化させる目標車間距離変化パターンL(t)を決定し、この目標車間距離変化パターンL(t)の車間距離変化時間tsにおいて目標車間距離の時間変化量の最大値を求める。そして、目標車間距離の時間変化量の最大値と隊列通信周期Tとの乗算値が閾値Thよりも小さいときは、目標車間距離変化パターンL(t)のデータを後方車両に送信し、目標車間距離の時間変化量の最大値と隊列通信周期Tとの乗算値が閾値Thよりも大きいときは、現在の目標車間距離変化パターンL(t)の車間距離変化時間tsに定数αを加算し、これを新たな車間距離変化時間tsとした目標車間距離変化パターンL(t)を作成する。
(もっと読む)
車間距離制御装置
【課題】先行車両と自車両との車間距離が基準車間距離を超えている場合において、燃料消費率の改善を図る。
【解決手段】ECU4は、車速センサ3が検出する車両1の速度に応じた基準車間距離を算出し、レーダセンサ2が検出する先行車両と車両1との検出車間距離と比較する。検出車間距離が基準車間距離以下の場合は基準車間距離を目標車間距離として車間距離制御を行い、検出車間距離が基準車間距離を超えている場合は基準車間距離を延長した延長車間距離を目標車間距離として車間距離制御を行う。
(もっと読む)
車両運動制御装置及びプログラム
【課題】車体合成力の最大値が楕円で制限される場合において、簡単な構成のマップを用いて所望の縦移動距離に対する横移動距離を最大にする軌道及び車体合成力を導出する。
【解決手段】車体合成力の最大値が縦横比γ0の楕円で制限される場合において、車体合成力の最大値及び所望の縦移動距離Xeを設定して、車体合成加速度の最大値の車体前後方向の成分F1/m、縦横比γ0、縦移動距離Xe、自車両の速度の車体前後方向の成分vx0、及び車体横方向の成分vy0により演算される第1及び第2のパラメータと、横移動距離Yeを最大にする軌道を導出するために導入された第1の導入パラメータμ1に関する値、第2の導入パラメータμ2に関する値、及び特定の条件の下、XsとYeとで示される位置に到達する時間との関係を定めたマップを用いて、所望の縦移動距離に対して横移動距離が最大となる軌道及び車体合成力を導出する。
(もっと読む)
車両用駆動装置の制御装置
【課題】コースト走行中のダウンシフトに際して車両の減速度を速やかに得ることができる車両用駆動装置を提供する。
【解決手段】マニュアルパワーオフダウンシフトに際して、エンジン回転速度NEを一時的に上昇させるブリッピング制御手段70と、ブリッピング制御開始後に減少する入出力回転速度差△Nに基づいて、ロックアップクラッチ26を係合または半係合させるロックアップ制御手段72とを含むことから、タービン回転速度NTとエンジン回転速度NEとの差がロックアップ制御またはロックアップスリップ制御を安定に実行することができる値すなわち所定値Aよりも小さくされて上記各制御が安定に実行され、エンジンが非駆動状態となって十分なエンジンブレーキが得られるので、コースト走行中のダウンシフトに際して車両の減速度を速やかに得ることができる。
(もっと読む)
車両の走行制御装置
【課題】手動変速機を搭載した車両において、オートクルーズ制御の実行中に、変速操作のためにクラッチの切断操作等が行われたときに、エンジン回転数が吹き上がることを防止する。
【解決手段】エンジン出力がクラッチと手動変速機とを介して駆動輪側へ伝達されるように構成され、かつオートクルーズ制御手段が備えられた車両において、前記オートクルーズ制御手段によるオートクルーズ制御中に、クラッチの切断操作等の動力遮断操作が行われたときに、該操作の直前の状態から手動変速機の変速段を一段シフトアップさせたときのエンジン回転数を目標回転数に設定し、この目標回転数に一致するようにエンジン回転数を制御するエンジン制御手段を備える。
(もっと読む)
車両の制御装置
【課題】時系列で設定した目標加速度に対する追従制御を行う際に、ロックアップクラッチ13の作動時とロックアップクラッチ13の作動不可時との間の挙動差を抑制乃至無くす。
【解決手段】車両の制御装置CRは、アクセル踏み込み操作時に目標加速度を時系列で設定する目標加速度設定部23と、実加速度が目標加速度に追従するようにエンジン出力を制御するエンジン出力制御部21と、変速制御部22と、ロックアップクラッチ13を作動不可状態を検出する作動不可検出部27とを備える。ロックアップクラッチ13の作動が不可能なときのアクセル踏み込み操作時には、目標加速度設定部23は、予め設定されている、ロックアップクラッチの作動状態での時系列の規範加速度を目標加速度にする。
(もっと読む)
車両用運動制御装置
【課題】ドライバへの操作負担を軽減できるステアリング制御とブレーキ制御の協調制御を行う車両用運動制御装置を提供する。
【解決手段】ステアリング制御とブレーキ制御のいずれをメインに行うかを選択し、その選択結果に基づいて、メインとされる側に対して行わせる車両旋回運動の要求値を出力すると共に、メインとされない側に目標値とメイン側要求値との差に応じた要求値を出力することで、ステアリング制御とブレーキ制御それぞれの配分を適切に設定する。これにより、ステアリング制御をメインとしつつブレーキ制御による補助を行うことが可能となるため、ステアリング制御のみの場合よりも目標値追従性を向上させた車両運動制御が行える。そして、ドライバへの操作負担を軽減できるステアリング制御とブレーキ制御の協調制御を行うことが可能となる。
(もっと読む)
車両の制御装置
【課題】故障時の車両加速を確実に防止し、且つ、故障検出信頼性向上、開発コスト削減の要求も満たす。
【解決手段】車両暴走に至る可能性のある故障が検出されたときに、エンジン11から車軸へのトルク伝達をカットして、故障時の車両加速を防止しながら車両を惰性走行させる。トルク伝達がカットされている期間にフェイルセーフ処理に移行すべき故障が発生しているか否かを判定し、当該故障が発生していると判定されれば、フェイルセーフ処理に移行してエンジン11の出力トルクを抑制した後にトルク伝達手段をトルク伝達可能な状態に戻してエンジン11の出力トルクを抑制して退避走行を可能とする。
(もっと読む)
車両制御装置
【課題】よりドライバーの心理状態を反映したエコ運転及び快適を実現しることができる車両制御装置を提供すること。
【解決手段】本発明による車両制御装置1は、ドライバーの笑顔状態を含む心理状態を推定する推定手段201aと、推定手段201aにより推定された心理状態が笑顔状態である場合に、車両の制御内容を省燃費及び快適に対応させて変更する変更手段202bとを含むことを特徴とする。
(もっと読む)
車両制御装置
【課題】運転者の意思に沿った応答性で所望の加速度を発生させることのできる車両制御装置を提供すること。
【解決手段】アクセルペダル20の操作速度が所定の操作速度よりも速い場合には、駆動装置10を制御する際におけるアクセルペダル20の操作に対する応答特性を高くするので、アクセルペダル20の操作速度が所定の操作速度よりも速く、運転者が駆動力の急激な変化を要求していることを示している場合に、駆動力を急激に変化させることができ、運転者の要求を満たすことができる。この結果、運転者の意思に沿った応答性で所望の加速度を発生させることができる。
(もっと読む)
車両の速度制御装置
【課題】各車輪の目標車輪速度を適切に設定することにより、車両旋回状態において各車輪の不要な前後スリップの発生を抑制し得る車両の速度制御装置を提供すること。
【解決手段】この装置では、操舵角δfgと、車両のステアリングジオメトリ(Rov=L/tan(δfg))とに基づいて車両の旋回中心(点O)が決定される。この旋回中心と、運転者により設定される指示車速とに基づいて目標角速度ωotが演算される。この目標角速度と、旋回中心からの各車輪の距離Row[**]とに基づいて、各車輪の目標車輪速度Vwt[**]が決定される。これにより、車輪間の移動軌跡差に起因する車輪間での車輪速度差が確保され得るように各車輪の目標車輪速度が個別に決定される。車輪間の移動軌跡差に起因する不要な前後スリップが補償されつつ、車速が指示車速に近づけられる。
(もっと読む)
車両の協調制御装置
【課題】 横滑り防止装置およびトラクションコントロール装置を協調制御する際に、車両の加速性能および旋回挙動性能の両立を図る。
【解決手段】 横滑り防止装置VSAおよびトラクションコントロール装置TCSを協調制御する協調制御手段が、駆動輪WRL,WRRの車輪速と車体速とを比較して該駆動輪WRL,WRRのスリップ量を算出し、スリップ量が閾値以上の場合にはトラクションコントロール装置TCSを横滑り防止装置VSAに優先して作動させるので、先ずトラクションコントロール装置TCSでスリップ量が過大な状態を解消して旋回挙動制御の制御性を高めることができ、またスリップ量が閾値以上の場合には横滑り防止装置VSAをトラクションコントロール装置TCSに優先して作動させるので、車両の加速性能を最大限に確保しながら横滑り防止装置で旋回挙動を安定させることができる。
(もっと読む)
車両用左右駆動力調整装置の制御装置
【課題】二次電池の充電率にかかわらず、常に姿勢制御を行うと共に、減速による違和感のない姿勢制御を行う車両用左右駆動力調整装置の制御装置を提供する。
【解決手段】姿勢制御を行うためのトルク差を演算し(ステップS1、S2)、二次電池の充電率の増減に応じて、電動AYCモータとブレーキ装置へのトルク差の配分率を変動させて(ステップS3〜S6)、配分されたトルク差により電動AYCモータ及びブレーキ装置を各々制御して、姿勢制御を行う(ステップS6〜14)。
(もっと読む)
車両制御装置
【課題】死角から物体が出現した場合であっても適切な走行支援を行うことのできる車両制御装置を提供する。
【解決手段】物体認識部16は、物体の存在の確からしさを示す確信度を演算することによって、物体検出部3によって検出された物体の認識を行う。また、物体認識部16は、検出された物体が死角から出現した物体であると判定した場合、通常時に比して確信度を増加するように演算する。物体認識部16は、確信度が通常時に比して増加するように演算することができるため、死角から急に出現した物体に対しては、物体検出部3での検出から認識するまでの間に要する時間を短くすることができる。認識するまでの時間を短くすることによって、その後の処理を早期に行うことが可能となるため、死角から急に出現した物体に対しても十分な時間を確保して適切な走行支援を行うことができる。
(もっと読む)
車両運動制御装置
【課題】加減速が不要なシーンで、横運動に連係した前後加速度制御の介入を抑制し、走行シーンに対するロバスト性を向上させることができる車両運動制御装置を得ること。
【解決手段】自車両情報取得手段1により検出したドライバ入力情報等に基づいて車輪制駆動トルクアクチュエータ3やブレーキランプ4を制御する車両運動制御演算手段2は、車両に横運動を発生させる操舵操作情報、もしくは車両に発生した横運動情報の少なくとも一つに基づいて車両に発生させる前後加速度指令値を演算する前後加速度指令値演算部7と、前記操舵操作情報および前記横運動情報に基づいて前記前後加速度指令値を補正する前後加速度指令値補正演算部8を備える。
(もっと読む)
制駆動力制御装置
【課題】カーブ走行時における車両の走行状態を運転者の感覚に沿ったものとすることができる制駆動力制御装置を提供すること。
【解決手段】カーブ走行時の車両の制駆動力を制御する制駆動力制御装置であって、カーブの入口側において車両に前後方向の減速度が作用した状態で旋回を開始した後の減速時に、車両に作用する横加速度と前後方向の減速度とが予め設定された第一の関係となるように制駆動力を制御(S90)可能であり、第一の関係は、入口側において旋回を開始したときに車両に作用している横加速度および前後方向の減速度に基づく。制駆動力の制御を実行するか否かは、過去のカーブ走行時に運転者が運転操作をして車両に作用した横加速度と前後方向の減速度との関係である第二の関係に基づき判定される(S60)。
(もっと読む)
21 - 40 / 916
[ Back to top ]