
Fターム[3D041AF01]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、制御方式 (1,637) | フィードバック制御 (916)
Fターム[3D041AF01]に分類される特許
901 - 916 / 916
出力増加を行う連続可変トランスミッションシステム
モータ(22)を有する連続可変トランスミッションへの出力を増加させる方法が提供される。連続可変トランスミッションは、エンジン(12)によって作動される。この方法は、モータ(22)の加速度が加速度しきい値を超えた場合にエンジン(12)の定常状態出力定格よりも高くなるように、エンジン(12)の出力を選択的に調整するステップを含む。  (もっと読む)
(もっと読む)
ハイブリッド駆動装置

【課題】 変速機の変速段階におけるトルク相で、車両の駆動力変化を抑制することの可能なハイブリッド駆動装置を提供する。
【解決手段】 車両の駆動力源として第1の原動機および第2の原動機を含む複数の原動機を有し、変速機が、その変速段階でトルク相からイナーシャ相を経由する構成を有しているハイブリッド駆動装置において、変速開始が予測された場合は、トルク相が開始される前に、第1の原動機および第2の原動機のトルクを、変速開始の予測前とは異なるトルクに変更して、駆動力の変化を抑制する第1の制御手段(ステップS1ないしS4)と、トルク相である場合は、第1の原動機および第2の原動機のトルクを制御して、車両の駆動力の変化を抑制する第2の制御手段(ステップS6,S7)と、イナーシャ相である場合は、第1の原動機のトルクをトルク相の開始前のトルクに戻す第3の制御手段(ステップS8,S9)とを有する。
(もっと読む)
作業車両の速度制御方法

【課題】作業車両の特に中〜高速度での走行中のエンジンの燃費及び騒音を低減しつつも、通常の乗用車と同じように変速操作具の増速操作に比例的に車速が増加するようにして運転感覚の良好な作業車両を提供できるようにする。
【解決手段】変速操作具の操作量を0から増加させる過程での車速増加を第一エンジン回転数増加率と第一速度比(変速機構の出/入力回転速度比)増加率にて現出し、エンジン回転数が定格値に到達した操作量から更に該変速操作具の操作量を増加する過程においては、該エンジン回転数を定格値に保持し、それに応じて、該速度比増加率を、該第一速度比増加率よりも大きい第二速度比増加率とし、車速は常に該変速操作具の増速操作に略比例的に増加するようにする。
(もっと読む)
4輪駆動車の制御装置
【課題】電動パーキングブレーキによって減速を行う際に問題となる、最大制動力の低さと、車両の不安定化を有効に防止する。
【解決手段】電動パーキングブレーキ制御部24は、ブレーキ制御部22から車両挙動を修正させる信号が入力されると、電動パーキングブレーキ30が作動している場合には電動パーキングブレーキ30の作動を解除し、また、主ブレーキ系統異常によるブレーキ制御量が入力されたると、そのブレーキ制御量を発生させるべく電動モータ29rl、29rrを駆動させる。更に、ACCシステム25から電動パーキングブレーキ30のブレーキ制御量が入力された場合には、そのブレーキ制御量を発生させるべく電動モータ29rl、29rrを駆動させる。そして、前後駆動力配分制御部18は、電動パーキングブレーキ30が作動している際には前軸と後軸とを直結させる。
(もっと読む)
協調型トラクション制御システム
個々の車輪の空転及び/又は横滑りを個別に制御する協調型トラクション制御システムである。該システムは、特定の車軸に備えられた所定の車輪に掛かる駆動トルクの量を調節できる駆動トルクアクチュエータに接続されている既存のトラクション及び挙動安定化モジュールを使用している。このシステムは、空転及び/又は横滑りしている車輪の駆動トルクの制御を行うか、或いは、ブレーキを作動させてスロットル角度を調節するとともに該駆動トルクの制御を行って、車輪の空転及び/又は横滑り及び/又は車両の動作を低減又は制御する。 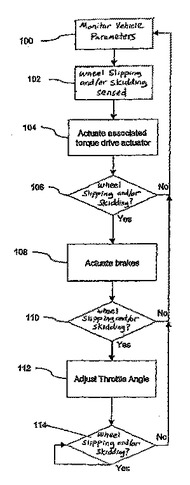 (もっと読む)
(もっと読む)
動的な軸重移動を補償する方法
本発明は、車両の荷重の一部が少なくとも一方の前輪の上に偏るときの動的な軸重移動を少なくとも部分的に補償する、改善された方法を提案する。まず、軸重移動を補償するために、駆動トルク要求が与えられ、したがって、時間制限付きのほぼ最大の駆動トルクが要求される。さらに、本発明は、特許請求の範囲に記載の方法を実施するマイクロプロセッサ及び制御装置を初めて提案する。本発明は、このタイプの制御装置又はプロセッサが取り付けられる車両駆動装置にも関する。本方法を実施するソフトウェアも記載される。最後に、本発明は、特許請求の範囲に記載の方法を実施するソフトウェアを実行するために、このタイプの制御装置又はマイクロプロセッサを備える自動車に関する。  (もっと読む)
(もっと読む)
ブレーキ制御装置を有する二輪車両
ブレーキ制御装置を有する二輪車両の場合、このブレーキ制御装置ブレーキ制御装置は、車両速度又はこれから導き出された値、特に車両加速度を能動的に変更又は制限することによって運転者を能動的にアシストする手段を有する。  (もっと読む)
(もっと読む)
惰性運転における車両駆動ユニットの運転方法および装置
【課題】惰性運転において燃料消費量を低減させる、車両駆動ユニットの運転方法および装置を提供する。
【解決手段】駆動ユニット(180)の惰性運転において、駆動ユニット(180)の出力変数が事前設定走行方式により設定される、車両駆動ユニット(180)の運転方法において、駆動ユニット(180)の惰性運転に対して少なくとも2つの事前設定走行方式が設定され、惰性運転において、事前設定走行方式のいずれかが走行状況の関数として選択される。
(もっと読む)
追従間隔制御を改良する方法
【課題】
追従間隔制御の快適性と安全性を向上させること。
【解決手段】
車両の追従間隔制御システムを改良する方法では、追従間隔制御の制動圧要件に車両の電子式制動制御システムのシステム制御が比較的にゆっくりな速度で行われるので、最高圧力増加率或いは減少率は超過しない。代用として、制動圧積分によりあらかじめ制動制御の計画が行なわれる。  (もっと読む)
(もっと読む)
クラッチ−独立動力取出装置の回転速度調整方法
クラッチ−独立動力取出装置(32)における回転速度を調整する方法である。動力取出装置(32)は、車両に設けられているエンジン(1)によって駆動される。エンジン(1)は自動ステージギア変速機(9)に自動車両クラッチ(3)を介して連結されている。変速機(9)、車両クラッチ(3)及びエンジン(1)を制御するために少なくとも一つの制御ユニット(45)が設けられている。制御ユニット(45)は、エンジン(1)の回転速度をスロットルレバー(61)の位置の関数として制御し、ギアセレクタ(46)の位置の関数として変速機(9)を制御する。動力取出装置(32)が係合され、ギアセレクタ(46)によってドライブポジションが選択されているときは、エンジン(1)の回転速度は、制御装置(60)によって制御され、車両クラッチ(3)の係合の程度はスロットルレバー(61)により制御される。動力取出装置(32)に係合している装置が制限位置に近づくと、エンジン(1)の回転速度は自動的に減速される。 (もっと読む)
自動車駆動列のための制御方法及びコントローラ
エンジンと、歯車中立を提供する連続可変比トランスミッションとを有する自動車駆動列のためのコントローラが記述される。このコントローラは運転手による入力に応じて車輪トルク及びエンジン速度のためのデマンドを設定するようになっており、その特徴とするところは、コントローラが、減少する車輪トルク手順を履行しながらエンジン速度を増大させることによる車両発進前のエンジン速度増大のための要求を表す運転手からの入力に応答し、かつ、引き続いて、発進を開始させる車両の運転手からの入力に続いて車輪トルクを増大させるように適応されることである。 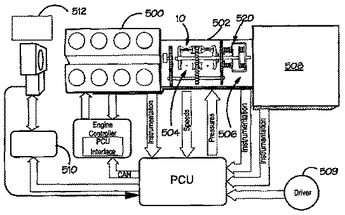 (もっと読む)
(もっと読む)
分離された機械的制御と電気的制御を有する動力装置の制御方法及び装置
本発明は、車両の動力装置の制御方法に関する。本発明は、動力装置による車両の特定の駆動モードに存する。エンジントルク抽出モードにおいては、本制御方法は、電気エネルギのバッファ要素の充電レベル(Ucapa)の測定値と、上記電気機械(Me111、Me212)の回転数(ωe1、ωe2)及び電気機械から供給されるトルク(Te1、Te2)の測定値のみを利用して、第1段階において、熱エンジンのトルク(Tice#)を計算し、車輪へ加えられるトルクと熱エンジンの回転数を同時に調整しながら、推定された機械的な特徴を表わす機械的な制御信号(u0)を作成し;次いで、第2段階において、機械的な制御信号に基づいて第1及び第2の電気機械のトルク(Te1#、Te2#)を計算し、エネルギレベルを調整するエネルギ的な制御信号を作成する;ことからなる。 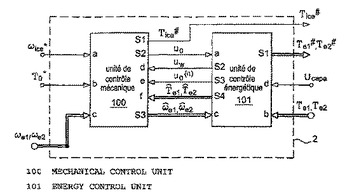 (もっと読む)
(もっと読む)
プロセスをコントロールするための、特に走行安定性をコントロールするための方法
調整パラメータが、コントロール変数の実測値と規定値の比較から決定されるコントロール偏差に依存して構成される、プロセスをコントロールするための方法において、コントロール変数の実測値が、第1のプロセスモデルによって決定され、コントロールの必要(10)が、コントロールの要求(20,30,40)が別のプロセスモデルによって決定されるコントロール変数の値に基づいて決定されかつ論理演算によって互いに結合されることによって、付加的にチェックされる。 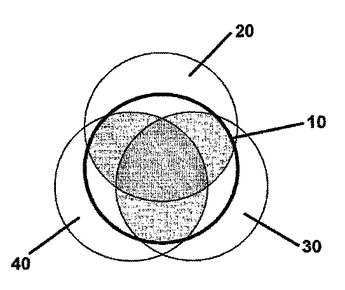 (もっと読む)
(もっと読む)
車両の自動変速装置
【課題】 ダブルクラッチ制御でエンジン回転の上昇が遅いとき、その回転上昇を早め、変速時間の長期化及び変速不能を防止する。
【解決手段】 機械的なシンクロ機構を有しないメインギヤの変速に際し所定のシンクロ制御を実行し、且つ変速機のシフトダウンの際に所定のダブルクラッチ制御を実行するものにあって、ダブルクラッチ制御が、クラッチ断及びギヤ抜き後、エンジン回転を所定の目標エンジン回転まで上昇させてクラッチを接し、目標メインギヤ段におけるドグギヤ回転をスリーブ回転付近まで上昇させる制御を含み、ダブルクラッチ制御の開始から所定時間が経過してもなおエンジン回転が目標エンジン回転に到達しなかったときは、目標エンジン回転を高める制御を行う。
(もっと読む)
車間距離制御装置
【課題】 車間時間または車間距離をステップ状に切り換えた時の車速変化を緩やかにする。
【解決手段】 車間時間がステップ状に切り換えられた時に、車間時間を所定の変化速度で変化させて目標車間時間T*を生成し、目標車間時間T*と車速検出値とに応じた目標車間距離を設定し、車間距離検出値が目標車間距離に一致するように車両の駆動力と制動力を制御する。これにより、車間時間をステップ状に切り換えた時の車速変化が緩やかになり、乗り心地をよくすることができる。
(もっと読む)
ハイブリッド車両およびその制御方法
【課題】 パラレルハイブリッド車両において、モータMG2の制御に起因する振動を抑制し、乗り心地を向上する。
【解決手段】 エンジン、モータMG1、モータMG2および車軸をプラネタリギヤを介して結合する。エンジンおよびモータMG1から出力された動力をモータMG2で補償して要求動力を車軸から出力する。この制御では、まず上記補償に必要なトルクをモータMG2の仮目標トルクとして設定する。この仮目標トルクになまし処理を施して目標トルクを決定する。車両の走行状態に応じてなまし処理の程度を変える。停車中にエンジンの始動が開始された場合は、高い応答性でモータMG2を制御して車軸へのトルク変動を適切に相殺する。通常走行中にはやや低い応答性でモータMG2を制御して運転者のアクセル操作に対し滑らかに出力トルクを変える。
(もっと読む)
901 - 916 / 916
[ Back to top ]