
Fターム[3D041AF01]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、制御方式 (1,637) | フィードバック制御 (916)
Fターム[3D041AF01]に分類される特許
101 - 120 / 916
衝突軽減制御装置
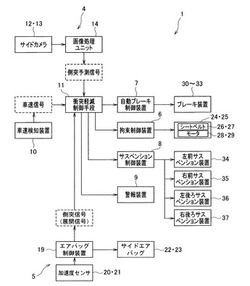
【課題】この発明は、被害時に被ったエネルギを吸収して損害を抑制し、乗員への被害を軽減し、車両の挙動が不安定とならないようにすることを目的としている。
【解決手段】この発明は、衝突軽減制御装置において、衝突軽減制御手段は、予知装置により側方衝突が予知された時に、予知された衝突が発生する衝突発生側を判別し、自動ブレーキ制御装置を、ブレーキ装置が作動しない程度に遊びをなくす与圧駆動制御し、拘束制御装置がシートベルト装置に設けたモータを駆動して所定の状態までシートベルトを巻取るよう巻取り駆動制御し、サスペンション制御装置は衝突発生側とは車両上で逆側のサスペンション装置を選出した上でそれらの減衰力を衝突発生側と比較して減少させるよう減衰力低減制御し、警報装置を所定の状態で警報動作制御する、第一の段階の統合制御を実施することを特徴とする。
(もっと読む)
操舵支援装置

【課題】 運転者の意図に応じた補助操舵トルクを付与することにより、運転者に与える違和感を軽減しながらハンドル操舵に適応した操舵支援制御が行うことができる操舵支援装置を提供する。
【解決手段】 逸脱防止支援ECU10は、操舵トルクが操舵トルクしきい値を超え、制御トルクが制御トルクしきい値を超えた時間が成立判定時間しきい値を超えたときに、干渉判定を成立させて、目標制御トルクを小さくする。ここで、車両の前方に他車両が走行し、他車両と白線との距離が所定値以下であり、かつ車両の他車両に対する到達時間が所定値以下の場合に操舵トルクしきい値、制御トルクしきい値、および成立判定時間しきい値を小さくする。
(もっと読む)
走行支援装置、走行支援方法及びコンピュータプログラム
【課題】追従走行中及び追従走行後の適切な制御スケジュールを生成することができるとともに、制御部の処理負担についても軽減することが可能な走行支援装置、走行支援方法及びコンピュータプログラムを提供する。
【解決手段】ACCシステムにより追従走行制御が実行されている場合に、追従対象となる前方車両の走行予定経路と走行情報を取得し(S25)、車両2の走行予定経路と前方車両の走行予定経路とを比較することにより追従走行区間を特定し(S27)、追従走行区間の前方車両の推定車速及び推定加速度から追従走行区間を走行する車両2の車速及び加速度を推定し(S28)、追従走行区間での追従走行制御を考慮した制御スケジュールを新たに生成する(S30)ように構成する。
(もっと読む)
車両のバネ上制振制御装置
【課題】適切な条件下でバネ上制振制御を介入させること。
【解決手段】路面からの入力又は運転者要求トルクに伴い車体に発生するバネ上振動を抑制させる為のバネ上制振制御量の設定を行うバネ上制振制御手段(バネ上制振制御部3)と、そのバネ上制振制御量を実現させるように車両駆動装置(エンジン20や変速機30)の出力を制御してバネ上制振制御を実行する駆動制御手段(駆動制御部2)と、を備えた車両のバネ上制振制御装置において、車両10の運転状態、車両10の状態又は運転者要求の内の少なくとも何れか1つに応じて、バネ上制振制御の実行を許可又は禁止すること。
(もっと読む)
走行制御装置及び走行制御プログラム
【課題】車両の走行状況に応じて適切に走行制御を再開する。
【解決手段】目標車軸トルク生成部52は、車速維持演算部51により演算された目標加速度を実現するための目標車軸トルクとして、車両の走行に対する走行抵抗を加味したフィードフォワード成分が含まれた目標車軸トルクを算出する。制動調停部58は、目標車軸トルク生成部52から入力される目標車軸トルクと、ブレーキドライバモデル57により演算された運転者のブレーキ操作量に対応する要求制動車軸トルクのうち、減速量が大きい方のトルクを選択して制動要求トルク実現部59へ出力する。また、要求制動車軸トルクが目標車軸トルクを上回っている(減速量が大きい)状態では、ブレーキオーバライド信号をFBトルク演算部62へ出力する。制動要求トルク実現部59は、制動調停部58から入力した車軸トルクを実現するための制御信号をブレーキECU40へ出力する。
(もっと読む)
車両の制御装置
【課題】変速ショックの発生を抑制しながら、フューエルカット制御の実施時間を長くする。
【解決手段】フューエルカット制御中のダウンシフト制御時(コーストダウン変速制御時)には、フューエルカット復帰回転数を下げて、通常制御時のフューエルカット復帰回転数Nnorよりも低い回転数Ndwnに設定する。このような設定により、コーストダウン変速制御中においてエンジン回転数NEが一時的に落ち込んでも、フューエルカット制御及び減速ロックアップスリップ制御を継続することが可能となり、燃費の向上を図ることができる。しかも、ダウンシフト変速線を高車速側に設定しなくて済むので、変速ショックの発生を抑制しながら、フューエルカットを継続することが可能になる。
(もっと読む)
ヨーレート制御装置
【課題】車両がバンクのあるカーブ路を走行する場合に、運転者の違和感を低減できるヨーレート制御装置を提供する。
【解決手段】規範ヨーレートYrefと実ヨーレートの偏差に応じた駆動力配分制御量Imを算出し、バンク走行検出部10が推定するバンク角度βの絶対値が所定値より大きくなった場合は、バンク角度βの絶対値の大きさに対応したバンク角補正ゲインBgを算出して駆動力配分制御量Imに乗算し、駆動力配分制御量Imを低減するECU30を備えるヨーレート制御装置とする。
(もっと読む)
車両の制御装置
【課題】運転者に不快感を与えることなくアイドル状態での燃費を向上させつつ、触媒を早期に暖機する車両の制御装置を提供する。
【解決手段】ニュートラル制御を実行するニュートラル制御実行手段と、均質燃焼を実行する均質燃焼実行手段と、リタード成層燃焼を実行するリタード成層燃焼を実行手段と、シフトレバー位置がDレンジにあるアイドル状態での車両停止時に前記均質燃焼実行手段により均質燃焼を行わせつつニュートラル制御に移行させるニュートラル制御移行手段と、前記均質燃焼からリタード成層燃焼への切換を許可するか否かを判定する判定手段と、この判定結果よりリタード成層燃焼への切換を許可する場合に、前記均質燃焼から前記リタード成層燃焼に移行させるリタード成層燃焼移行手段とをエンジンコントローラ(15)が備える。
(もっと読む)
運転支援装置
【課題】安全性を確保しつつ運転者に与える違和感を軽減した運転支援装置を提供する。
【解決手段】
車間制御ECU20が、自車両を設定車速又は設定車間距離に従って走行させるACC制御を実行し、ドライバー意識・状態検出センサ48等が、運転者が運転に不適正な運転不適状態であることを検出し、車間制御ECU20がACC制御を実行しているときに、ドライバー意識・状態検出センサ48等が運転者が運転不適状態であることを検出したときは、自車両の加速を抑制する加速抑制制御を実行し、加速抑制制御中に車間制御ECU20は、運転者のアクセル操作があったときは加速抑制制御を続行し、当該アクセル操作後に再度のアクセル操作があり、運転者が居眠りや意識低下の状態にないことが明らかであるときは加速抑制制御を解除する。これにより、安全性を確保しつつ運転者に与える違和感を軽減することができる。
(もっと読む)
車両用動力伝達装置の制御装置
【課題】有段変速部を有する車両用動力伝達装置の制御装置において、変速ショック発生の可能性を低減できる車両用動力伝達装置の制御装置を提供する。
【解決手段】トルク補償手段72は、トルク相補償制御において、変速指示に基づいて決定したトルク補償開始時期で第2電動機M2の作動により出力トルクTOUTの変動(落込み)の抑制を開始する場合には、係合装置の油圧値PCXに基づいて上記トルク補償開始時期を決定する場合と比較してトルク補償率を小さくする。ここで、上記変速指示基準で上記トルク補償開始時期が決定されると出力トルクTOUTの落込みと前記トルク相補償制御の進行との間に時間的なずれが生じる可能性がある。従って、その時間的なずれが生じたとしても、変速ショックが大きなること無く変速ショック発生の可能性を低減できる。
(もっと読む)
車両の制御装置
【課題】第2電動機からの動力を有段式の自動変速機を介して駆動輪(車軸)に出力する車両の制御装置において、ダウンシフト変速中のショック発生及び自動変速機の摩擦材熱負荷の増大を抑制する。
【解決手段】ダウンシフト変速開始前にエンジン回転数を低下させ、エンジン回転数が保護制御が作動しない回転数にまで低下した後にダウンシフト変速を実施する。また、ダウンシフト変速中に、点火時期遅角制御や燃料噴射量の低減制御等のエンジン側の制御にてエンジン回転数の上昇速度を抑制する制御を実施することで、ダウンシフト変速中に第2電動機のトルクダウンを実施できるようにする。このような制御によりトルクダウン変速中の第2電動機の吹けを抑制することができ、変速ショックの抑制及び摩擦係合要素の摩擦材保護が可能になる。
(もっと読む)
動力装置
【課題】左右の被駆動部の回転を容易に精度良く制御できることで、ドライバビリティを向上させることができる動力装置を提供する。
【解決手段】動力装置1では、互いの間で動力を伝達可能で、動力の伝達中、互いの間に回転数に関する共線関係を保ちながら回転し、その速度共線図において順に並ぶように構成された第1要素S1、第2要素C1、R3、第3要素R1、R2、C3、第4要素C2、S3および第5要素S2はそれぞれ、第1回転機11の第1ロータ13、左右の被駆動部WFL,WFRの一方、原動機3の出力部3a、左右の被駆動部WFL,WFRの他方、および第2回転機21の第2ロータ23に機械的に連結され、第3回転機31の第3ロータ33は、原動機3の出力部3aに機械的に連結されており、第1回転機11と第3回転機31、および、第2回転機21と第3回転機31はそれぞれ、互いに電気的に接続されている。
(もっと読む)
電気自動車の車両制御装置
【課題】各車輪を別個独立した電気モータによって駆動する電気自動車において、コーナリング時のステア特性に応じて各車輪の最適な駆動力を制御する
【解決手段】電気自動四輪車10において車両制御装置100は、各車輪に対して制御すべき制御前後力FXi’を算出する駆動力演算部129を備える。実ヨーモーメントからステア特性を判定するステア特性判定部122を備える。ステア特性判定部122は、電気自動四輪車10のコーナリング時に、ヨーモーメント演算部125で演算された電気自動四輪車10のヨーモーメント、センサ部110から出力された操舵角δ、車速V、ヨーレートγ、加速度aX 及び加速度aY に基づいて、電気自動四輪車10のステア特性を判定する。駆動力演算部129は、ステア特性判定部122による判定結果に応じて、各車輪に対して制御すべき制御前後力FXi’を変更する。
(もっと読む)
車両の制御装置
【課題】計算負荷を低減することで、限られたメモリ容量しか実装できない車両へのJITモデリングの適用を可能にすると共に、より多くのデータを網羅することを可能にして制御精度を向上させるようにした車両の制御装置を提供する。
【解決手段】車両の運転を示すパラメータ群を計測し(S10)、計測されたパラメータ群を入力とし、対応して設定された出力と共に入力データuDB(i)、出力データyDB(i)として蓄積して蓄積データを得(S12)、入力に対して時刻tのときのモデルを同定するための要求点を設定し(S14)、設定された要求点と蓄積入力との距離を求めて類似度を算出し(S16)、蓄積データから距離が小さいデータの集合を探索して近傍のデータとして決定し(S18)、それに含まれる出力データから推定出力を算出し(S20)、算出値に基づいて車両の運転を制御する(S22)。
(もっと読む)
車両安定化制御装置
【課題】車両がカーブを安定して通過できないと予測される場合において車両を効果的に減速し得るアンダステア抑制制御を達成する車両安定化制御装置を提供すること。
【解決手段】ナビゲーション装置の地図情報に基づくカーブ形状と、現在の車速とに基づいて、カーブ進入前後において、車両がカーブを安定して通過できる可能性(Fg)が判定される。車両がカーブを適切に通過できると判定された場合(Fg=0)、アンダステア抑制制御の開始しきい値Kjが大きい値(デフォルト値K2)に設定され、且つ、車両のヨー特性が重視されるように各車輪の制動力が配分される第1特性(デフォルト特性Bm**)が選択される。一方、車両がカーブを適切に通過できないと判定された場合(Fg=1)、しきい値Kjが相対的に小さい値(K1)に調整され、且つ、車両の減速特性が重視されるように各車輪の制動力が配分される第2特性(Bg**)が選択される。
(もっと読む)
車両用動力伝達装置の制御装置
【課題】電動機によって差動状態が制御される電気式差動部と、動力伝達経路の一部を構成する変速部とを、備えた車両用動力伝達装置において、エンジン始動時に発生する歯打ち音の発生を抑制することができる車両用動力伝達装置の制御装置を提供する。
【解決手段】変速比設定手段92は、エンジン停止時の第2電動機M2による走行中の自動変速部20の変速比を、第1電動機M1によってエンジン8を始動させるときの第1電動機M1の電圧波形に応じて設定するため、自動変速部20のギヤ比が好適に設定され、第1電動機M1によるエンジン始動時の歯打ち音を抑制することができる。
(もっと読む)
ハイブリッド車両
【課題】短時間で停止状態から車両の走行を開始させることができるハイブリッド車両を提供することにある。
【解決手段】内燃機関及び電気モータと、駆動輪と、複数の変速段及び入力軸を備え、入力軸と駆動輪とを係合させることが可能な変速機構及び、内燃機関の機関出力軸と入力軸とを係合させることが可能なクラッチを含み、入力軸が、電気モータのロータとも係合している変速機と、出力を変化可能な補機と、各部の動作を制御する制御手段と、を有し、制御手段は、停止状態から発進する場合に、クラッチを半係合状態とし、電気モータの回転数を低下させた後に、複数の変速段のいずれか1つを係合状態とし、その後、電気モータの駆動力を駆動輪に伝達させることで上記課題を解決する。
(もっと読む)
エンジン制御装置
【課題】この発明は、エンリッチ制御を働かせるエンリッチ条件を、成立させ難く、あるいは、その成立を遅延させるよう制御し、その制御のために付加する検知装置類を少なく、あるいは、なくして、既存のエンジン補機の利用効率を高めるようにし、通常運転での走行と特定運転条件下での走行の両方での触媒保護を行うことを目的とする。
【解決手段】この発明は、エンジン制御装置において、エンジン制御手段にエンリッチ制御領域が第1マップより狭い第2マップを設け、エンジン制御手段は、エンジンの温度が設定温度より高く、かつ車両速度が設定速度より低い特定運転条件下では、第2マップを選択してファン装置を駆動するよう制御するとともに燃料噴射制御すること特徴とする。
(もっと読む)
車両運動制御装置及びプログラム
【課題】ドライバに与える違和感を少なくし、かつ、障害物を回避した自動運転を実現することができる
【解決手段】障害物回避ポテンシャル関数演算手段24によって、現在の目標到達点と障害物との相対位置に基づいて、障害物回避のためのポテンシャル関数を演算する。目標車両運動演算手段30によって、目標追従のためのポテンシャル関数、及び演算された障害物回避のためのポテンシャル関数の和である車両制御ポテンシャル関数に基づいて、現在の車両の進行方向と目標到達点へ向かう方向との偏角及び現在の車両の位置と目標到達点との相対位置における車両制御ポテンシャル関数の勾配を演算し、車両制御ポテンシャル関数の勾配に基づいて、目標車両運動を演算する。車両運動制御手段32によって、演算された目標車両運動を実現するように、操舵装置及び加減速装置を制御する。
(もっと読む)
車両の制御装置
【課題】車輪相互間の差回転を適切に制御すると共に、車輪と路面の間のグリップ力を適切に監視してタイヤのグリップ力を最適に維持しながら摩擦円を使い切る効率の良い最適な制御を行う。
【解決手段】ドライバ要求に基づき車輪に発生するタイヤ力と車輪に現在発生しているタイヤ力を基にタイヤ力の摩擦円からのオーバー量をオーバータイヤ力Foverとして演算し、このオーバータイヤ力Foverが+の場合、このオーバータイヤ力Fover分のトルクToverを減じるようにエンジン制御部39に信号出力する。また、オーバータイヤ力Foverと、車体速と各車輪速との差回転を演算し、オーバータイヤ力Foverとこの差回転に基づいてブレーキ駆動部25に信号出力して各輪を制動制御する。
(もっと読む)
101 - 120 / 916
[ Back to top ]