
Fターム[3D044AB01]の内容
定速走行制御及び計器板 (7,800) | 定速走行制御・適用車種 (174) | 一般車両 (161)
Fターム[3D044AB01]に分類される特許
121 - 140 / 161
車外監視装置、及び、この車外監視装置を備えた走行制御装置
【課題】誤認識を排除し、撮像手段とレーダ手段から取得できる可能な限りの多くの情報を用いて精度の良い制御を可能とする。
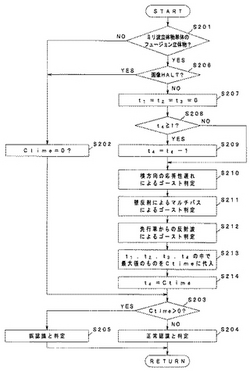
【解決手段】フュージョン立体物確認部18は、フュージョン立体物設定部17から入力される画像立体物単体のフュージョン立体物、ミリ波立体物単体のフュージョン立体物、画像立体物とミリ波立体物との組み合わせによるフュージョン立体物の全ての立体物に判定を行い、画像情報を基に予め定めておいた横方向の応答性遅れによるゴースト判定、壁反射によるマルチパスによるゴースト判定、及び、先行車からの反射波によるゴースト判定の条件を満たすミリ波立体物単体のフュージョン立体物を虚像であると判断する。この虚像との判定結果は設定時間維持される。こうして虚像と判断された立体物は、その後の制御対象からは除かれる。
(もっと読む)
車両用走行制御装置

【課題】自車両が加速制御される場合に、走行状態に応じて応答性の良いブレーキを実現する。
【解決手段】自車速Vが所定の速度閾値VTH以下であるか、自車両が交差点及び交差点近傍の所定範囲内を走行しており、且つ追従走行制御による加速制御が行われているとき、要ブレーキ予圧発生状態であると判断し、自車速Vと目標車速Vs*とに基づいて算出される目標加減速度α*に応じてブレーキ予圧Ppを設定し、これに応じたブレーキ圧を発生させることにより、ブレーキの応答性を向上する。
(もっと読む)
走行制御装置
【課題】先行車に追従する場合でも、自車両が必要以上に加減速しないようにできる。
【解決手段】走行制御装置は、自車両前方に先行車と先々行車とが存在しており(ステップS1、ステップS2)、その先行車が二輪車の場合において(ステップS3)、二輪車と先々行車との車間距離L1が距離L1d(Lmb)以下であり(ステップS8)、かつ自車両と二輪車との相対速度ΔVが相対速度ΔVd以上であり(ステップS9)、かつ道路幅方向において二輪車が先々行車の側面よりも外側にいるときには(ステップS10)、自車両と先々行車との車間距離である先々行車用車間距離L3が目標車間距離L*となるような走行制御にして、先々行車に追従するようにする。
(もっと読む)
車間距離制御装置
【課題】 車間距離制御中の減速度について車両乗員に違和感を与えない車間距離制御装置を提供すること。
【解決手段】 自車両の走行を制御することにより自車両と先行車両との車間距離を制御する車間距離制御装置において、自車両が、先行車両との車間距離が比較的短い状況下で減速を行う第一の減速状態にある場合と、先行車両との車間距離が比較的長い状況下で減速を行う第二の減速状態にある場合とで目標減速度の値及び/又は該目標減速度に到達するまでの減速度勾配の大きさを変える。先行車両との車間距離が比較的短い状況下で先行車両に不必要に接近しないようにして車両乗員の安心感を向上させるために、第一の減速状態のときに、第二の減速状態のときに比して、目標減速度を増加させる、及び/又は、減速度勾配の大きさを増加させる。
(もっと読む)
車両用運転支援装置
【課題】 先行車の捕捉が不安定となった際に、適切なタイミングで走行制御を中断することのできる車両用運転支援装置を提供する。
【解決手段】 PCU6は、車外環境の悪化等によってIPU5による立体物の継続的な認識時間が短くなり先行車の捕捉とロストが頻繁に繰り返されている場合には、判定用カウンタCt1にカウンタ値を加算し、先行車が継続的に捕捉されている場合、或いは、先行車が継続的にロストされている場合にはクリアカウンタCt0の作用によって判定用カウンタCt1からカウンタ値を周期的に減算する。これにより、先行車の捕捉状態に応じて判定用カウンタCt1を適切に増減させることができ、この判定用カウンタCt1の計数値が第1の閾値に達してから少なくとも第2の閾値以下となるまでの間、走行制御のHALTを判定することにより、適切なタイミングでの走行制御の中断が可能となる。
(もっと読む)
車両用走行制御装置
【課題】この発明の目的は、ETCレーン等のように指定車速以下に減速して走行する必要のある場所を通過する場合に、アクセルペダル及びブレーキペダルがともに踏込み操作されていないときのみ、車両を減速走行させることにより、ドライバーの意志(操作)を尊重し、ドライバーにとって違和感のない走行を実現することにある。
【解決手段】この発明は、車両用走行制御装置において、車両のアクセルペダルの操作状態を検出可能なアクセル状態検出手段と、車両のブレーキペダルの操作状態を検出可能なブレーキ状態検出手段とを備え、減速制御手段は、道路状況検出手段により車両がゲートに接近したことを検出し、アクセル状態検出手段によりアクセルペダルが非踏込み状態であることを検出し、且つブレーキ状態検出手段によりブレーキペダルが非踏込み状態であることを検出したときに、車両を減速走行させることを特徴とする。
(もっと読む)
車両の減速制御装置
【課題】前車との位置関係を適正にするために、運転者の減速意思に応答して、減速制御を行なうものであって、前車が減速しているときに、適度な減速度が得られる車両の減速制御装置を提供する。
【解決手段】車両と前記車両の前方の前車との位置関係を適正にするために前記車両の運転者の減速意思が検出されたときに前記車両の減速制御を行う車両の減速制御装置であって、前記前車が減速しているときに、前記前車の減速度301に対応する値に基づいて求められた目標減速度304に基づいて、前記車両の減速制御が行われる。前記前車の減速度に対応する値は、前記前車の減速度と、前記前車と前記車両の車間距離に基づいて、決定されることができる。
(もっと読む)
車両用走行制御装置
【課題】 交差点手前で、自車両が、自車両と同一方向に走行する他車線の車両の陰となって、対向車線の右折車両から認識されるタイミングが遅れることを回避する。
【解決手段】 自車両と同一方向の右側車線に隣接車両が存在し且つ自車両が交差点手前の制御対象領域に位置するとき、隣接車両が基準ラインに達するまでの到達所要時間を算出し、この到達所要時間の間に自車両が基準ラインに到達するために必要な目標加速度Agを算出する(ステップS2〜S5)。この目標加速度Ag及び基準ラインに到達したときの予測される到達車体速度Vhが共にそのしきい値よりも小さく、且つ自車両が目標加速度Agで加速可能な状態にあるとき、目標加速度Ag相当の加速を行う(ステップS6〜ステップS9)。自車両と隣接車両とはほぼ同時に基準ラインに達することになりほぼ並走するから、対向車線の右折車両から見て自車両が隣接車両の陰となることが回避される。
(もっと読む)
車間距離制御装置
【課題】降雨等により車間距離検出性能が低下した状態でも、自車両が先行車両に対し目標車間距離より接近するのを抑えるようにすることが可能な車間距離制御装置を提供すること。
【解決手段】自車両から照射した照射波の反射波を用いて測定した先行車両と自車両との車間距離が限界車間距離以内にある場合には車間距離が目標車間距離となるように制御し、車間距離が限界車間距離を超える場合には車間距離制御を解除する車間距離制御装置100で、雨量検知センサ17により測定した雨量の増大に伴い、限界車間距離は短くなるように変更されるようにした。
(もっと読む)
車線逸脱防止装置
【課題】運転者の心的負荷を抑えつつ、走行車線からの逸脱を防止できる。
【解決手段】車線逸脱防止装置は、感圧センサ24のセンサ値からRRI値を得て、このRRIに基づいて運転者の心的負荷を計測し(ステップS3)、その計測値に基づいて運転者の心的負荷が高まっている場合、逸脱傾向の判断に用いる設定時間TTLCを大きい値に変更する(ステップS4、ステップS5)。これにより、車線逸脱防止制御の介入時期を早くする。また、運転者の心的負荷が高まっている場合、車線逸脱防止制御のために自車両に付与するヨーモーメントや減速を小さくする。
(もっと読む)
他車両検出装置
【課題】反射波からその反射波の原因となったものが他車両であるか、あるいは道路構造物といったその他の物体であるかといった区別をすることができる他車両検出装置を提供すること。
【解決手段】自車両から照射した照射波の反射波を用いて他車両の検出を行う他車両検出装置において、反射波が持つ強度のパターンから他車両の有無を判定する他車両判定手段を備えた(ステップS3〜ステップS5)。
(もっと読む)
走行制御装置
【課題】先行車両からのスプラッシュにもかかわらず、より精確な車間距離を検出して車間距離に応じた車両の制御を行える走行制御装置を提供すること。
【解決手段】計測した自車両と先行車両との車間距離に応じて車両の制御を行う車両制御装置を備える走行制御装置において、先行車両が路面の水膜上を走行時に生じるスプラッシュ量を推定する(ステップS11)。推定したスプラッシュ量に応じて計測した車間距離の補正を行う(ステップS12及びステップS13)ようにした。
(もっと読む)
車両ガイドシステム
交通状況を表す入力量(V,e1,ek,di,vri,φi)に従って,かつ動的に変化可能なパラメータに従って,車両をガイドするための操作量(am,ab)を用意する方法は,複数の入力量のセットから,唯一の評価量(g)が形成され,かつパラメータの複数のものが,同一の評価量を用いて定められることを特徴としている。 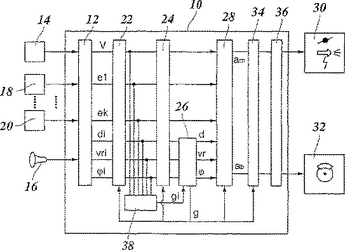 (もっと読む)
(もっと読む)
車両用走行制御装置
【課題】 追従モードの移行を容易にする。
【解決手段】 先行車追従走行制御を行う全車速領域を低速領域と高速領域の少なくとも2つの車速領域に区分し、低速領域において、先行車が検出されている場合は車間距離を保って先行車に追従走行するとともに、先行車が検出されていない場合は追従走行を解除する低速追従モードと、高速領域において、先行車が検出されている場合は設定車速を上限として車間距離を保って先行車に追従走行する制御を行うとともに、先行車が検出されていない場合は設定車速一定で定速走行する高速追従モードと、全車速領域において、所定の操作部材が操作されている間、設定車速に関わらず車間距離を保って先行車に追従走行する優先追従モードとを有する。
(もっと読む)
車輌用走行制御装置
【課題】自動走行制御中にマスタシリンダと車輪のホイールシリンダとの連通を遮断する制動力の制御が行われた場合に、ブレーキペダルを踏み込めないことに起因して自動走行制御を終了し得なくなることを防止する。
【解決手段】マスタシリンダと車輪のホイールシリンダとの連通を遮断しアキュムレータの高圧を使用して制動力を付与することにより車輪の過剰な加速スリップを低減するトラクション制御が行われる車輌に於いて、自動走行制御としての定速走行制御中であるか否かの判別が行われ(S20)、左右前輪の何れかについてトラクション制御が実行されているか否かの判別が行われ(S30)、車輌が走行しているか否かの判別が行われ(S40)、定速走行制御が実行され車輌が走行している状況に於いて左右前輪の何れかについてのトラクション制御が所定の時間以上継続されたときには(S50〜70)、定速走行制御が終了される(S80)。
(もっと読む)
他車両検出装置及び車間距離制御装置
【課題】先行車両の車両の種類、及びその車両数を判断可能な装置、および先行車両の車種に応じて車間距離の制御を変更可能な装置を提供すること。
【解決手段】先行車両車間検出部8において、反射波が持つ強度パターンに基づき他車両が四輪車であるか二輪車であるかの車両種類を判定する手段を備え、また車間距離制御装置100において、先行車両車間検出部8にて検出した他車両の種類に応じて自車両の先行車両追従モード又は警報を発する車間距離を変更するようにした。
(もっと読む)
雨量検知式制御装置
【課題】雨量に応じて車間距離制御や車間距離警報などの制御を実行する場合に、トンネル等により一時的に雨が遮断されることがあってもドライバに違和感を与えることのない制御を行うことができる雨量検知式制御装置を提供すること。
【解決手段】雨量に応じて車両の制御を行う装置において、雨量が所定雨量を超えているか否かを判断する雨量判断手段と、雨量が所定雨量を超えているときには雨量に応じた車両の制御を解除する制御解除手段と、トンネル等により雨が遮断される距離を取得する雨滴遮断距離取得手段と、この距離が所定距離より短いときには、雨量が所定雨量を超えていなくても、解除した車両の制御が復帰するのを禁止する制御復帰禁止手段とを備えている。
(もっと読む)
運転支援装置
【課題】道路情報に基づいて、新しい道路環境に適応するように自車両を走行させ、安全性を向上させること。
【解決手段】車輪の回転速度に対応した信号を検出する車速センサ10、ナビゲーション装置20、及びスロットルバルブの開度を調節するスロットル駆動器40が設けられている。事前登録地点(例えば、制限速度が変更される地点)に自車両が接近した場合、事前登録地点を起点とする道路の制限速度を取得し、自動的に、スロットル駆動器40を用いて、自車両の駆動力を制御することによって、自車両の車速を制限速度まで変更させるようにした。
(もっと読む)
運転支援方法およびシステム
【課題】
省エネルギー、排ガス汚染の防止、および交差点での安全走行を目的とした、交差点での車両のノンストップ通過の実現。
【解決手段】
交差点の手前一定距離Dの地点Pにおいて前記交差点の信号状態情報、前記距離D情報および前記通信領域−交差点間の許容最高速度情報から、交差点をノンストップで通過するための前記地点P−交差点間の推奨所要時間 、推奨走行速度 を演算し、車両側では前記交差点までの間を前記推奨走行速度で走行することによって交差点ノンストップ通過を実現する。
(もっと読む)
先行車追従走行制御装置
【課題】 追従走行モード切り換え時の利便性を向上する。
【解決手段】 設定車速が設定されている場合は、車速が低速領域から高速領域に入ったときに低速追従走行モードから高速追従走行モードへ自動的に移行する。また、低速領域の追従走行モードから高速領域の追従走行モードへのモード切り換え操作履歴が記憶されている場合は、車速が低速領域から高速領域に入ったときに低速領域の追従走行モードから高速領域の追従走行モードへ自動的に移行する。
(もっと読む)
121 - 140 / 161
[ Back to top ]