
Fターム[3D046BB17]の内容
ブレーキシステム(制動力調整) (22,399) | 目的、効果 (3,539) | 走行時の速度制御 (711)
Fターム[3D046BB17]の下位に属するFターム
Fターム[3D046BB17]に分類される特許
161 - 180 / 311
車両の走行制御装置
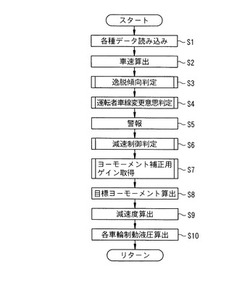
【課題】自車両が逸脱傾向になることでレーダ検出範囲外になり、ACCで自車レーンの前方を走行する先行車両を追従対象車両として認識しなくなっても、逸脱防止完了後に、当該先行車両を追従対象車両として再度、確実に認識できる。
【解決手段】車両の走行制御装置は、レーダ16が検出する自車レーンの前方を走行する先行車両の走行状態情報を記憶するとともに、レーダ16で先行車両を検出できなくなった場合、前記記憶した走行状態情報に基づいて、当該先行車両の走行状態を予測し(ステップS7)、その予測した先行車両の走行状態に基づいて、当該先行車両を検出できるよう、自車両が走行車線から逸脱しないように自車両に付与する目標ヨーモーメントを算出する(ステップS8)。
(もっと読む)
車両の制御装置

【課題】 追随制御による走行中にエンジンブレーキが作用しない或いは低減するような変速状態に切り換えられた場合でも乗員に対して違和感を生じさせることなく円滑に走行し得る車両の制御装置を提供する。
【解決手段】 変速状態をエンジンブレーキが作用する変速状態で保持する変速規制モードに設定可能な変速制御手段と、先行車両との車間距離を測定する先行車両検出手段と、車間距離を予め設定された目標距離になるように走行装置を制御する車間制御手段とを備える。ACC制御中であって、変速規制モードではエンジンブレーキが作用してこの変速規制モードが解除されるとエンジンブレーキの作用が低減し或いは無くなるような走行状態での走行中に、変速規制モードの解除操作があった場合に、変速制御手段におけるモード解除の実行を入力操作から所定時間遅延させるとともに、この遅延期間中に車間距離を増大させる補正手段が設けられている。
(もっと読む)
運転支援装置
【課題】 駐車する場所の区別なく、車両の速度を良好に制御して乗員の所望の場所へこの車両を駐車させることのできる運転支援装置を提供する。
【解決手段】 少なくとも車両周辺の情景を車室内に備えられた表示手段2aに表示して、乗員による車両の運転操作を支援する運転支援装置において、以下の構成を備える。表示手段2aに表示される画像上において乗員が指定する位置に基づいて、車両を停止させたい場所である到達目標を設定する目標設定手段11と、車両と到達目標との距離を計測する距離計測手段5と、車両の移動速度を計測する速度計測手段6と、車両の移動速度が、所定の速度を超えないように制御する速度制御手段13と、車両が到達目標に達したときに車両を停止させる停止手段14と、を備える。
(もっと読む)
自動車の走行制御装置及び方法
【課題】道路形状に応じて自動車を走行制御するシステムにおいて、ACCの先行車追従制御から道路形状に応じた速度制御への切り替え時に、乗員に違和感を与えない速度制御を実現する。
【解決手段】自車前方の先行車との車間距離に応じて第1の目標速度を演算し、道路情報に応じて第2の目標速度を演算し、前記第1の目標速度に応じて自車の速度を制御する第1の制御モードから、前記第2の目標速度に応じて自車の速度を制御する第2の制御モードへ切り替える際に、自車の加減速度が所定の範囲内になるように自車の速度を制御する。
(もっと読む)
運転支援装置
【課題】 平地及び斜面の区別なく、乗員による繊細な運転操作を軽減して正確な駐車操作が可能な運転支援装置を提供する。
【解決手段】 車両周辺の情景を撮影し、少なくとも車室内に備えられた表示手段2aに表示して、乗員による車両の運転操作を支援する運転支援装置において、乗員が車両を停止させたい場所である到達目標を設定する目標設定手段11と、車両と到達目標との距離を計測する距離計測手段5と、車両の移動速度を計測する速度計測手段5と、車両と到達目標との距離に応じて設定された速度を超えないように移動速度を制御する速度制御手段13と、を備える。
(もっと読む)
車間距離制御装置
【課題】 車両の燃料消費率を改善すること。
【解決手段】 車間距離制御装置1は、先行車両と自車両との間の車間距離を検出する車間距離検出手段9と、先行車両の自車両に対する相対速度を算出する相対速度算出手段7aと、先行車両と自車両との目標車間距離の設定を行う目標車間距離設定手段7bと、車間距離Lと、相対速度Vrと、目標車間距離S1と、に基づいて自車両の目標加減速度を設定する目標加減速度設定手段7dと、目標加減速度設定手段7dにより設定された目標加減速度Gに基づいて、自車両の加減速度を制御する加減速度制御手段7eと、を備えている。目標加減速度設定手段7dにより設定される目標加減速度Gが収束傾向にあり、且つ前記車間距離検出手段9により検出された車間距離Lが、解除車間距離設定手段7fにより設定された解除車間距離S3以上のとき、加減速度制御手段7eは加減速度の制御を終了する。
(もっと読む)
先行車検出装置
【課題】車線逸脱防止制御の作動後に推定される車線と実際の車線との誤差を小さくする。
【解決手段】先行車検出装置は、ヨーレートの変化が緩やかになるようなフィルタ処理が施されたヨーレートに基づいて、自車両が走行する車線を推定し、推定した車線内で、先行車を検出する。車両の走行中に、自車両が自車線から逸脱しないように、車両を制御する車線逸脱防止制御が行われると、ヨーレートの変化がさらに緩やかになるように、フィルタ処理の特性を高くする。これにより、フィルタ特性を変更する前の推定車線11に比べて、フィルタ特性変更後の推定車線12と、実際の車線との誤差が小さくなる。
(もっと読む)
先行車検出装置
【課題】検出している先行車が切り替わった後に、車線逸脱防止制御が作動する場合に、自車線上の先行車を迅速に検出し直す。
【解決手段】先行車検出装置は、ヨーレートの変化が緩やかになるようなフィルタ処理が施されたヨーレートに基づいて、自車両が走行する車線を推定し、推定した車線内で、先行車を検出する。検出している先行車が切り替わった後に、自車両が自車線から逸脱しないように、車両を制御する車線逸脱防止制御が行われる場合に、ヨーレートの変化が緩やかになる度合が小さくなるように、フィルタ処理の特性を低くする。これにより、フィルタ特性を変更する前の推定車線21に対して、フィルタ特性変更後の推定車線22内で、自車線上の先行車12を迅速に検出し直すことができる。
(もっと読む)
追従走行制御装置および追従走行制御方法
【課題】 ドライバーの意図に応じた適切な追従走行制御を可能とする追従走行制御装置および追従走行制御方法の提供。
【解決手段】 先行車両との車間距離や先行車両との相対速度等に基づいて自車両の目標加減速度を設定する追従走行制御装置では、先行車両の制動灯が点灯したと判断されると(S200のYes)、自車両のドライバーの視点が検出され(S202)、ドライバーが先行車両の制動灯を注視しているか否か判定される(S204,S206)。ドライバーが先行車両の制動灯を注視していると判断され(S206のYes)、かつ、ドライバーがブレーキ操作を行ったと判断された場合(S208のYes)、ドライバーの要求制動力に応じて目標制御量の補正量が算出され(S210)、追従走行時用の加減速度マップが適宜更新される(S218)。
(もっと読む)
先行車追従制御装置
【課題】車両が停止する時でも先行車追従制御を解除しない。
【解決手段】先行車に追従して自動走行する先行車追従制御が行われている状態で、先行車に追従して自車両が停止すると、ブレーキアクチュエータ6によって作動させる油圧ブレーキから、電動パーキングブレーキ9に切り替えて、車両の停止を保持する。この停止保持制御が開始されても、先行車追従制御を継続して行うことにより、先行車に追従して、自車両の停止・発進を自動的に行うことができる。
(もっと読む)
車両のクルーズ走行制御装置
【課題】 ドライバに対しクルーズ設定車速を制限車速以下の安全な車速まで減速することを促すことができる車両のクルーズ走行制御装置を提供すること。
【解決手段】 走行中にスイッチ操作を行うと、スイッチ操作時の車速をクルーズ設定車速とし、原則的にクルーズ設定車速を維持する走行制御を行うクルーズ走行制御手段を備えた車両のクルーズ走行制御装置において、自車が走行する道路の制限車速情報を収集する制限車速情報収集手段を設け、前記クルーズ走行制御手段は、前記クルーズ設定車速が前記制限車速を超過している場合、速度超過情報をドライバに伝達する手段とした。
(もっと読む)
気動車両の駆動方法およびその装置
【課題】上り勾配から下り勾配への切り換えや逆の切り換え時に一定の低速度走行を安定保持できる気動車両の駆動方法およびその装置を提供する。
【解決手段】動力源からの動力がトルクコンバータ4を介して歯車変速機構17に伝達される動力伝達装置を備えた気動車両の駆動方法であって、トルクコンバータ4の入力側にはスリッピングクラッチ3を、出力側には湿式多板ブレーキ18をそれぞれ設けると共に、歯車変速機構17の出力軸40の回転速度に基づいて前記スリッピングクラッチ3と湿式多板ブレーキ18の作動手段を制御する制御手段を設け、気動車両の上り勾配走行時には、湿式多板ブレーキ18により微少な所定値の制動トルクが作用している状態でスリッピングクラッチ3の作動手段を制御し、下り勾配走行時には、スリッピングクラッチ3により微少な所定値の駆動トルクが伝達されている状態で湿式多板ブレーキ18の作動手段を制御する。
(もっと読む)
車両の制御装置
【課題】 ダウンシフトが行なわれなくても、運転者の意図通りに減速する。
【解決手段】 VSC_ECUは、運転者のシフト操作に基づいて変速が行なわれるマニュアルモードが選択され(S100にてYES)、アクセルオフである場合(S102にてYES)、ホイールシリンダの油圧を増大し、車輪のブレーキ力を増大するステップ(S104)を含む、プログラムを実行する。
(もっと読む)
車両走行制御装置および車両走行制御方法
【課題】 自車の前方の進路を減速して走行する必要がある場合、走行速度を適切に減速して走行させる車両走行制御装置および車両走行制御方法を提供する。
【解決手段】 自車の位置を検出する位置検出手段と、前記位置検出手段で検出された前記自車の位置に基づき前記自車の前方の進路上に前記自車の減速走行を必要とする減速要因があるか否かを判定する減速判定手段と、前記減速要因に基づき前記進路上の走行地点における前記自車の推奨速度を取得する推奨速度取得手段と、走行中の前記自車の実速度を取得する実速度取得手段と、前記走行地点における前記実速度と前記推奨速度との大小を比較する速度判定手段と、前記進路上に前記減速要因があり、前記走行地点における前記実速度が前記推奨速度よりも速い場合、ブレーキの操作量に対応して発生するブレーキ力の大きさが増加するようにブレーキ力を制御するブレーキ力制御手段と、を備える。
(もっと読む)
自動車の駆動伝達系を操作するための方法
本発明は、外力によって作動させられる動力分配装置の切換中に自動車を運転するための方法に関する。公知の方法によれば、車両運転者は、動力分配装置の切換が行えるように、その前に、駆動伝達系のクラッチを足で操作して開放しなければならない。したがって、本発明の目的は、自動車の楽な運転を可能にする方法を提供することである。このために、制御装置(16)は、動力分配装置(20)を切換える前に、切換過程に関連する切換部材(23、24、25、26)でトルクを低減する。変速機は、特に自動変速機(15)として構成され、また自動変速機(15)のクラッチ(18)を開放することによって、トルクの低減が達成される。切換が完了すると、クラッチ(18)が閉鎖されて、上述の切換部材(23、24、25、26)のトルクが再び許容される。このようにして、車両運転者は、切換命令を与えることによって動力分配装置(20)の切換を簡単に促すことができる。本発明の方法は自動車で使用される。  (もっと読む)
(もっと読む)
走行制御装置
【課題】 本発明は、ブレーキ作動時の減速度の変化による違和感を低減することをその課題とする。
【解決手段】 本発明による走行制御装置は、所定の対象物との自車の相対関係を保つために必要な第1目標加速度G1(負の値は減速度を表す。)を算出する手段と、第1目標加速度G1を混合比γで、第1目標加速度G1よりも所定量だけ大きい第2目標加速度G2を混合比1−γで足し合わせた最終目標加速度GBR(=γ・G1+(1−γ)・G2)を算出する手段と、第1目標加速度G1が所定の負の閾値Gthrを下回ったときに、最終目標加速度GBRを実現するべく作動し始める制動力発生手段とを備える。最終目標加速度GBRを決定する混合比γは、第1目標加速度G1が閾値Gthrを下回ったときに0付近に設定され、第1目標加速度G1が小さくなるにつれて1に向かって増大される。
(もっと読む)
車両の横転防止装置
【課題】車両の重心高さによらず的確な横転の予知を行い、この予知に基づき要点を防止する車両の横転防止装置を提供することにある。
【解決手段】ステアリングホイールの操舵角速度を検出する操舵角速度検出手段4と、車体5に発生するロールレイトを検出するレイトセンサ6と、エアブレーキ装置を作動させる、またはエンジン出力を低下させて、車両1の横転を防止する安全措置を講じる安全措置実行手段と、前記操舵角速度検出手段で検出された前記ステアリングホイールの操舵角速度を車速センサ7により検出された車速に基づいて、3段階のレベルに設定し、前記操舵角速度が車両1の重心高さによってはロールオーバーになり得る所定角速度以上であるレベル1となる時で且つレイトセンサ6で検出された車体5のロールレイトが横転危険性が判断できる所定値以上である時にエアブレーキ装置8を作動させる。
(もっと読む)
車両の減速制御装置
【課題】運転者が想定した減速度よりも過大な減速度が付与されることにより運転者に違和感を与えることを抑制可能な車両の減速制御装置を提供する。
【解決手段】車両の前方の道路の分岐点に関する情報を入手する手段と、前記分岐点よりも先方の複数の先方道路のうち少なくとも一つの特定の前記先方道路を走行するために減速が開始されるべき場所を求める手段と、運転者の減速意図を検出する手段とを備え、前記減速が開始されるべき場所で運転者の減速意図(A点)が検出され、更に、所定の区間(Pr)、運転者の減速意図が継続していると判断されるときに、前記車両が前記特定の先方道路を走行するために有効な減速度を前記車両に作用させる減速制御が行われる。
(もっと読む)
車両用ブレーキ制御装置
【課題】 各車輪の制動力配分が適切なものとなるようにすることで、低μ路面等において特定車輪が簡単にロック傾向に陥ってしまうことを防止する。
【解決手段】 必要制動トルクが駆動輪駆動トルク未満であるか否かにより、駆動輪となる後輪RL、RRのみに制動力を発生させるか、それとも後輪RL、RRに加えて従動輪となる前輪FL、FRにも制動力を発生させるかを変更する。これにより、平坦路や登坂路のみならず、車両に対して重力に基づく推進力が発生する降坂路についても、クリープ速度が目標速度となるように保ち、かつ、最適な前後制動力配分を達成することが可能となる。そして、このように最適な前後制動力配分を達成することが可能になることで、低μ路面等において従動輪側が簡単にロック傾向に陥ってしまうことを防止できる。
(もっと読む)
自動速度制御装置
【課題】 交通状況に応じた速度制御を行うことにより、使用者の精神的及び経済的な負担を軽減することができる自動速度制御装置を得る。
【解決手段】 車速を検出する速度検出部2と、予め最大設定速度と最小設定速度とを記録している速度記録部4と、速度検出部2の出力信号と最大設定速度または最小設定速度とを比較する速度比較分5と、アクセル開度を検出するアクセル開度検出部6と、使用者の所望したアクセル開度を基準設定アクセル開度として記録しているアクセル開度記録部7と、速度比較部5の出力信号を用いて最小設定速度から最大設定速度の範囲内で巡航するように基準設定アクセル開度に基づいて自動車のアクセル開度を制御する制御10とを備えた。
(もっと読む)
161 - 180 / 311
[ Back to top ]