
Fターム[3D046BB17]の内容
ブレーキシステム(制動力調整) (22,399) | 目的、効果 (3,539) | 走行時の速度制御 (711)
Fターム[3D046BB17]の下位に属するFターム
Fターム[3D046BB17]に分類される特許
81 - 100 / 311
車両用駆動力制御装置
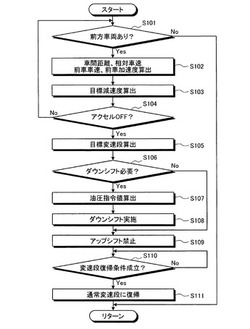
【課題】走行環境を走行するために適切な減速度に基づいて、運転者の減速意図に応答して減速制御を実施する車両用駆動力制御装置であって、減速の応答性に関して、運転者のフィーリングに合う減速制御を行なうことが可能な車両用駆動力制御装置を提供する。
【解決手段】車両の走行環境を検出する手段と、前記走行環境を走行するために適切な前記車両の減速度を設定減速度として求める手段(S101)と、運転者の減速意図を検出する手段(S104)と、前記運転者の減速意図が検出されたときに前記設定減速度に基づいて前記車両の駆動力を制御する手段(S108)とを備え、予め設定された通常時に比べて、前記設定減速度が大きいときには、前記通常時に比べて前記車両に減速度が早く発生するように制御する(S107)。
(もっと読む)
車両用ブレーキ制御装置

【課題】リニア弁を用いて各W/C圧の調圧を行う車両用ブレーキ制御装置において、ドライバのブレーキフィーリングの向上を図る。
【解決手段】ブレーキペダルの操作量に対する目標W/C圧の特性が行きマップと戻りマップというヒステリシスを設けるような形態となるようにする。そして、ブレーキペダルの操作状態に応じて行きマップと戻りマップを選択し、第1〜第4リニア弁に流す電流の電流値を決定する。これにより、ブレーキペダルを少し操作しただけでW/C圧がそれに追従して変化するということを防止でき、ドライバが意図的にブレーキペダルを操作していないときにまでW/C圧が変化してしまうことを防止できる。したがって、ドライバのブレーキフィーリングを向上させることが可能となる。
(もっと読む)
車両用自動ブレーキ制御装置
【課題】玉突き事故の拡大の回避を図るとともに、後方車両の追突により自車の受ける衝撃を低減することができる車両用自動ブレーキ制御装置の提供。
【解決手段】自車Bの前方に前方車両Aが位置し、かつ後方に第1後方車両Cが位置する場合において、第1後方車両Cが、更に後方から走行してきた第2後方車両Dに追突されたときに、第1後方車両Cへの第2後方車両による追突発生又は追突予知信号を受信する車車間通信用送受信アンテナ8と、自車Bの車速を検出する車速センサ2と、自車Bのブレーキ圧を制御するECU6とを備え、ECU6は、第1後方車両Cへの追突発生又は追突予知信号を受信し、かつ、自車Bの車速が基準速度以下である場合に、ブレーキ圧を第1圧力まで上昇させ、自車Bへの追突後、ブレーキ圧低下条件が成立すると、ブレーキ圧を第2圧力に低下させ、ブレーキ圧再上昇条件が成立すると、ブレーキ圧を第1圧力に再上昇させる。
(もっと読む)
車両用走行制御装置
【課題】ドライバの加速操作の意図を反映した適切な加減速制御を行う。
【解決手段】車両コントローラ10は、カーブ路の道路曲率に基づいて、車両がカーブ路を走行する際の目標車速を算出するとともに、算出した目標車速に基づいて、エンジンコントローラ4およびブレーキアクチュエータ5に指示を出して、車両を加減速させる。減速制御の作動中に、ドライバのアクセルペダル操作を検出すると、車両コントローラ10は、アクセルペダル操作が行われた車両位置、および、アクセルペダル操作量に基づいて、目標車速を修正する。
(もっと読む)
過回転防止装置
【課題】ミスシフト時に生じ得る課題を解決することができる過回転防止装置を提供する。
【解決手段】手動多段変速装置24のギアポジションを変更する際に、ギアポジションの変更に起因したパワートレインの過回転を防止する為に、過回転が発生し得るギアポジションにゲートストッパーを延出して当該ギアポジションへの変速を機械的に阻止する過回転防止制御を行う。この過回転防止制御を開始した際に制動装置を作動して車速を制御する車速制御手段を行う。すなわち、エンジンコントロールユニット11は、前記過回転防止制御中にクラッチを切断した際には、車速制御信号16をABSコントロールユニット15に出力してブレーキユニット32を作動し車速をコントロールする。
(もっと読む)
車両の障害物検知装置
【課題】レーダ装置1の位置推定部4bが、曲率半径推定部11aにより推定された、自車両の進行路の曲率半径を入力しかつ該曲率半径に基づいて、検知した障害物の所定時間後の位置を推定するとともに、その推定された曲率半径が、予め設定された所定曲率半径よりも小さいときには、該所定曲率半径に基づいて上記障害物の上記所定時間後の位置を推定する場合に、障害物の所定時間後の位置を正確に推定できるようにする。
【解決手段】上記所定曲率半径を、自車両の最小回転半径と略同じ値(特に5mが好ましい)に設定する。
(もっと読む)
車両の路面接触抑制装置
【課題】車体の路面への接触を抑制することが出来る車両の路面接触抑制装置を提供する。
【解決手段】本発明は、車両の進路上の路面の勾配情報を取得する勾配情報取得手段と、取得した勾配情報から勾配変化位置を検出する変化位置検出手段と、取得した勾配情報から検出された勾配変化位置における角度変化量を検出する変化点角度検出手段と、車両の車速を検出する車速検出手段と、検出された勾配変化位置の角度変化量及び車速に基づいて車両の路面への接触を予測する接触予測手段と、接触が予測された場合、車両の路面への接触を抑制する接触抑制手段と、を備える。
(もっと読む)
車両用駆動力制御装置
【課題】運転者の減速意図が検出されたときに車両の走行環境パラメータに基づいて、減速装置の係合・解放手段による係合または解放によって減速度を発生させる車両用駆動力制御装置において、運転者の減速意図を検出してから、実際に減速度が発生するまでの遅れを抑制することが可能な車両用駆動力制御装置を提供する。
【解決手段】車両の走行環境パラメータに基づいて減速装置を作動させる必要があると判断したときに運転者の減速意図に基づいて前記減速装置を作動させて減速度を発生させる車両用駆動力制御装置において、前記減速装置は、係合・解放手段を有し、前記減速装置が作動したときに前記係合・解放手段の係合または解放によって減速度を発生させるものであり、前記減速装置を作動させる必要があると判断したときに、前記係合・解放手段を、前記減速装置が実質的に作動する直前の待機状態に移行させる動作を行う。
(もっと読む)
車両のクルーズコントロール装置
【課題】先行車ロスト時における減速度に応じて速やかに制動を解除できる車両のクルーズコントロール装置を提供する。
【解決手段】アダプティブクルーズコントローラは、追従する先行車が自車の前方からいなくなる先行車ロスト時を判定する先行車ロスト時判定手段(ステップ3)と、先行車ロスト時における減速度が所定値(1.96m/s2)より高い場合に減速度を所定の低速モードで減少させる低速モード制動解除手段(ステップ7,8,9)と、先行車ロスト時における減速度が所定値(1.96m/s2)以下の場合に減速度を所定の高速モードで減少させる高速モード制動解除手段(ステップ7,9)とを備え、低速モード制動解除手段は高速モード制動解除手段より減速度を減少させる速度が低い領域を持つ構成とする。
(もっと読む)
車両用運転支援装置
【課題】本発明は、燃費向上に寄与する回生ブレーキが作動するようにドライバーのブレーキ操作を誘導することができる車両用運転支援装置の提供を目的とする。
【解決手段】要減速地点の地図情報を記憶する地図DBを備え、車両の現在位置に基づき進行方向に位置する要減速地点の地図情報を地図DBから抽出するナビゲーション装置7と、抽出された要減速地点の地図情報に基づいて、その要減速地点における目標車速を設定し、現在車速から設定された目標車速まで回生ブレーキで減速する場合に必要な減速距離を算出するECU10と、地図情報が抽出された要減速地点からECU10によって算出された減速距離分手前に位置する地点に車両が到達した場合にブレーキ操作の開始をするようにドライバーに案内する案内装置40とを備える、車両用運転支援装置。
(もっと読む)
運転支援装置及び運転支援方法
【課題】車両がカーブを通過する際に車両を自動減速させる運転支援装置の安全性を一層向上させる。
【解決手段】道路のカーブの手前で自車両の速度を自動的に減速させる運転支援装置であって、運転支援ECU10は、自車両が通過すべきカーブの条件に基づいて決定した減速量を、自車両情報、外部環境情報に基づいて自車両の走行安全性が高まるように補正して減速させる。これにより、カーブの条件に加えて、自車両情報や外部環境情報を考慮して減速量を決定して減速するので、自車両がスリップ等するのをより確実に防ぐことができ、走行安全性を高めることができる。
(もっと読む)
車両用運転補助装置
【課題】障害物の属性、及び距離に基づいて適切な制御を行なうことが可能な車両用運転補助装置を提供すること。
【解決手段】自車両周辺を撮像する撮像装置10、レーダー装置20、又は通信機30のいずれかを少なくとも有し、自車両周辺のリスク要素に関する情報を取得する、リスク要素情報取得手段と、リスク要素情報取得手段により検出された情報に基づいて、各リスク要素が有するリスク程度を計算する、リスク程度計算手段82と、リスク程度計算手段により計算された各リスク要素が有するリスク程度に基づいて、自車両内の機器を制御する、制御手段86と、を備えることを特徴とする。
(もっと読む)
脇見運転防止装置
【課題】後退時に適切に脇見運転を判定して運転者への警報を行うことができる脇見運転防止装置を提供すること。
【解決手段】本発明に係る脇見運転防止装置1は、運転者の顔又は視線の方向が所定の範囲内に第一の期間あれば脇見運転であると判定する脇見運転防止装置であって、
前記所定の範囲を車両の前進時と後退時とで異ならせる範囲変更手段3を有することを特徴とする。
(もっと読む)
操舵装置
【課題】運転者によるステアリングホイールの保舵状態を安価な構成で把握すること。
【解決手段】ステアリングホイール11に対して振動を加える少なくとも1つの振動源(加振手段16)と、そのステアリングホイール11の振動状態を検出する振動検出手段44と、この振動検出手段44により検出された振動状態に基づいて運転者によるステアリングホイール11の保舵状態を推定する保舵状態推定手段34と、を備えること。ここで、その振動検出手段44は、ステアリングホイール11の左右均等な位置に夫々少なくとも1つずつ設けることが好ましい。
(もっと読む)
電動パーキングブレーキ制御装置
【課題】路面の摩擦係数に関わらず動的制動時における車両の操縦安定性を確保する電動パーキングブレーキ制御装置を提供する。
【解決手段】パーキングブレーキ10の制動力を変更する電動アクチュエータ20を制御する電動パーキングブレーキ制御装置40,60を、車両の走行状態に基づいて路面の推定摩擦係数を算出する摩擦係数推定部61と、パーキングブレーキ10が解除された状態において、推定摩擦係数に応じてパーキングブレーキ10の目標減速度を設定する目標減速度設定部41bと、パーキングブレーキ10の制動時に、目標減速度に応じて電動アクチュエータ20を制御する制御部41cとを備える構成とする。
(もっと読む)
車両の減速制御装置
【課題】内燃機関への燃料供給の停止が禁止された場合に、制動力の低下を抑制する。
【解決手段】HV_ECUは、回生制御が制限され(S108にてYES)フューエルカットを許可しない場合(S116にNO)にフューエルカットを禁止するステップ(S120)と、フューエルカットを実行する場合のエンジンブレーキEB(1)とフューエルカットを禁止する場合のエンジンブレーキEB(2)とをエンジン回転数NEにより算出するステップ(S124)と、エンジンブレーキEB(1)からエンジンブレーキEB(2)を減算した値を油圧ブレーキBとして算出するステップ(S126)と、制限された回生ブレーキRB(2)とエンジンブレーキEB(2)と油圧ブレーキBとで制動するステップ(S128)とを含むプログラムを実行する。
(もっと読む)
自動運転制御装置
【課題】自動運転からマニュアル操作による運転に変更する際、ステアリング等の各操作手段が突然動きだし、ドライバに精神的な焦燥感を感じさせるようなことのない自動運転制御装置を提供する。
【解決手段】本発明の自動運転制御装置では、自動運転中には、ステアリング15、アクセルペダル18、シフトレバー21、ブレーキペダル24等の各操作手段をニュートラル状態に保持するバイ・ワイヤ技術が用いられる。ドライバが自動運転解除要求を行った後、実運転をドライバが引き継ぐまでの間に、該各操作手段を実際の運転状況にあわせて動作させ始めるが、このとき、該各操作手段を所定位置まで移動させる動作を、時間tdをかけて行わせるように制御する。
(もっと読む)
車両用制動制御装置
【課題】車両用制動制御装置において、ブレーキ効き度合に応じて制動制御の制御量を調整することで車両の走行状態に拘らず適切な制動力の制御を可能とする。
【解決手段】前後加速度センサ61が検出した実減速度Grと、ホイールシリンダ圧センサ44FR,44FL,44RL,44RRが検出したホイールシリンダ圧から算出した推定減速度Geとの偏差に基づいて、油圧ブレーキ13の効き度合を判定し、ブレーキECU14は、車輪速センサ46FR,46FL,46RL,46RRの検出結果に基づいて各駆動輪がロックせずに車両の挙動が安定するように電磁式増圧弁43FR,43FL,43RL,43RR及び電磁式減圧弁45FR,45FL,45RL,45RRの基準開度を設定すると共に、油圧ブレーキ13の効き度合に基づいてこの基準開度を補正する。
(もっと読む)
自動運転制御装置
【課題】自動運転からマニュアル操作による運転に切換えられた後、ドライバの運転操作が適正であるかどうかチェックされた上で自動運転が完全に解除される自動運転制御装置を提供する。
【解決手段】本発明の自動運転制御装置には、ドライバが自動運転解除要求を行った後、実運転をドライバが引き継ぐまでの間に、ドライバが適正な運転操作を行い得るかどうかを判定する自動運転解除可否判定手段が設けられている。この自動運転制御装置は、S163〜S168に示されるように、ドライバによる運転操作と自動運転制御装置が最適と判断する運転操作とを比較して、この比較結果が一定時間、一定値以内であれば、ドライバは適正な運転をすることができると判定する。
(もっと読む)
走行制御システム及び走行制御方法
【課題】ナビゲーション装置が保持する情報を利用して車両の走行支援制御を行う際に、不適切な情報に基づき好ましくない制御がなされることを抑止し、各種走行支援サービスに適した走行支援制御を実現し、安全性,運転性の向上を図る。
【解決手段】ナビゲーション装置は、環境情報に対する信頼度を表す確度情報を求める情報確度算出手段を備え、データベースの車両位置周辺の環境情報を制御装置に送信する際、その環境情報に対する確度情報を付加して制御装置に送信する。制御装置は、ナビゲーション装置から送られる確度情報に基づいて、送られてきた環境情報を走行制御に利用するか否か判定する情報利用判定手段を備え、受信した環境情報の利用が不適切であると判定した場合、ナビゲーション装置から受信した環境情報を利用せずに走行制御を行う。
(もっと読む)
81 - 100 / 311
[ Back to top ]