
Fターム[3D046BB17]の内容
ブレーキシステム(制動力調整) (22,399) | 目的、効果 (3,539) | 走行時の速度制御 (711)
Fターム[3D046BB17]の下位に属するFターム
Fターム[3D046BB17]に分類される特許
21 - 40 / 311
運転支援装置
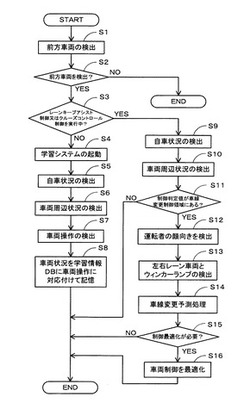
【課題】過去の運転者の車両操作と対応付けて記憶された車両状況から今後の運転者が行う車両操作を予測することにより、現在の状況に応じた適切な走行を行わせることを可能とした運転支援装置を提供する。
【解決手段】自車両の前方を走行する前方車両が検出された場合に、学習システムを起動させて自車状況と自車両の周囲状況を前方レーダ装置3や各種センサ等によって検出し(S5、S6)、運転者の車両操作と対応付けて累積的に学習情報DB8に記憶させる(S8)とともに、一方で、その学習結果と現在の車両状況とから運転者が今後に車線変更の運転操作を行うか否かを予測し(S14)、車線変更の運転操作を行うと予測された場合にはレーンキープアシスト制御やクルーズコントロール制御等の車線変更を妨げる制御を抑制する(S16)ように構成する。
(もっと読む)
車両の走行制御装置

【課題】簡単な制御で実現でき、また、停止間際での不要な減速度変化を抑制し、ドライバに対して不自然な感覚を与えることなく安定した停止を行う。
【解決手段】走行制御ユニット5は、先行車が略停止状態と推定される場合には、先行車の直後の第1の領域と、この第1の領域の後方に第2の領域とを設定する。そして、自車両1が第2の領域の更に後方の領域を走行している場合には、先行車後方のDstopの位置で停止する減速度G3を演算出力し、自車両1が第2の領域を走行している場合には、車両がクリープ現象で走行するクリープ車速V2よりも低車速の場合に限り、一定の減速度KG2を出力し、自車両1が第1の領域を走行している場合には、車両がクリープ現象で走行するクリープ車速V1よりも低車速の場合に限り、上述の一定の減速度KG2よりも大きな一定の減速度KG1を出力する。
(もっと読む)
自動制動制御装置
【課題】制動が開始されるタイミングをユーザが認識することができる自動制動制御装置を提供する。
【解決手段】車両の位置21が自動制動開始位置32より500mの位置になると、自動制動開始位置の拡大地図30aが分割画面として表示される。拡大地図30aには、自車位置マーク21とともに自動制動開始位置までの距離を示したインジケータ31aと、自動制動開始位置を示す自動制動開始位置マーク32とが表示される。インジケータ31aでは、車両の位置と自動制動開始位置との間の距離がバーの長さで表示され、自動制動開始位置に近づくにしたがってバーの長さは短くなる。車両の位置が自動制動開始位置より20mの位置になると、拡大地図30aに比べて縮尺率の大きい自動制動開始位置の拡大地図30bが分割画面として表示される。拡大地図30bには、拡大地図30aと同様に、自車位置マーク21とともにインジケータ31bと自動制動開始位置マーク32とが表示される。
(もっと読む)
自動制動制御装置
【課題】自動制動により車両は減速するのか、または運転者の操作で車両を減速しなければならないかを容易に認識できる自動制動制御装置を提供する。
【解決手段】車両が進行すると推定される経路を進行推定経路24aとして表示する。この進行推定経路24aを車両が進行するものとして自動制動制御が実行される。進行推定経路24aは道路種別に基づいて推定される。たとえば、道路22cは細街路であるのに対し道路22bは国道であるので、進行推定経路24aは分岐点23aを通過した後、道路22bを通過する。進行推定経路24aは、車両の現在地から500m先まで推定されるので、進行推定経路24aは、500m先で途切れる。
(もっと読む)
車両制御装置
【課題】アクセル操作とブレーキ操作を1つのペダルで兼用する車両制御装置において、従来よりも車速制御をしやすくすること。
【解決手段】ペダル40の踏み込み量によって車速を制御する速度制御部100を設ける。この速度制御部100は、ペダル40が速度制御踏み込み範囲内で踏み込まれたときは車速を減速させ、速度制御踏み込み範囲内でペダル40が戻されたときは車速を加速させる。また、ペダル40が速度制御踏み込み範囲よりも深い制動範囲まで踏み込まれたときは、その踏み込み量に応じた制動力で車両を制動させる。ペダル40の踏み込み量の大小によって車速を制御することができるので、速度制御がしやすくなる。しかも、速度制御踏み込み範囲を超えてさらに深い範囲まで十分に踏み込むことにより急ブレーキをかけることも可能となる。
(もっと読む)
緊急状態検出装置
【構成】 緊急状態検出装置10は、コンピュータ12および加速度センサ14を含み、たとえば自動車のブレーキ装置110に用いられる。自動車のブレーキ装置110では、コンピュータ12は、自動車120の運転者の足に取り付けられる加速度センサ14の出力に基づいて、走行中の自動車120における緊急状態を検出する。また、コンピュータ12は、緊急状態を検出したとき、ブレーキアクチュエータ16に対して信号を送り、自動車120を強制的に減速させる。
【効果】 通常時と緊急時とでは明確に異なる運転者の足の動作そのものを検出し、その検出結果に基づいて緊急状態を検出するので、走行中の自動車における緊急状態を正確に検出できる。
(もっと読む)
ベルト式無段変速機搭載車両の制御装置
【課題】車両の停止直前に油圧不足を防止することで変速比を十分にロー側へ戻す。
【解決手段】本発明は、ベルト式無段変速機搭載車両において、車両が停止する直前、セカンダリプーリへの供給圧を増大させることでベルト式無段変速機構の変速比を最もロー側へ移行させ、ロー戻し手段によってセカンダリプーリへの供給圧を増大させるとき、フォワードクラッチのクラッチ容量を低下させてフォワードクラッチを解放する(S21)。
(もっと読む)
自動車の走行制御システム、および、車両制御装置
【課題】車両制御のために、地物を早い時期に高精度で認識すること。
【解決手段】車両制御装置100は、車両10の周辺の地物を認識して道路環境の情報を取得する第1の道路環境情報取得手段と、前記第1の道路環境情報取得手段で認識した地物とは異なる地物を認識して道路環境の情報を取得する第2の道路環境情報取得手段と、前記第1の道路環境情報取得手段により取得した第1の道路環境情報と前記第2の道路環境情報取得手段により取得した第2の道路環境情報に応じて自車前方の道路環境を認識する道路環境認識手段と、を有することを特徴とする。
(もっと読む)
プリクラッシュシステム
【課題】本発明は、想定される衝撃に対して効果的に備えることができるプリクラッシュシステムを提供する。
【解決手段】プリクラッシュシステム10は、自動車20に衝撃が入力される可能性がある状況のとき運転者Hが行う耐ショック姿勢に起因して自動車に作用する荷重を検出する耐ショック姿勢検出用センサ11〜14と、耐ショック姿勢検出用センサ11〜14によって検出された検出値に基づいて運転者Hが耐ショック姿勢であるか否かの判断をするとともに、乗員が耐ショック姿勢であると判断すると自動車20に搭載された安全装置24,25を作動させるコントローラ15と、を備える。
(もっと読む)
車両用運転支援装置
【課題】必要なときだけ確実に運転支援を行う。
【解決手段】車両の現在位置、車両前方のカーブ情報および現在の車両状態に基づいて車両前方カーブ通過時の車両状態を推定する(1a)とともに、記憶されている過去のカーブ通過時の車両状態に基づいて運転者のカーブ通過時の許容車両状態を推定し(1b)、車両前方カーブ通過時の推定車両状態と運転者のカーブ通過時の許容車両状態とに基づいてカーブにおける運転支援を行うか否かを判定する(1c、1d)。
(もっと読む)
駐車支援機能付き車両
【課題】車両の駐車時に、車両本体が周辺の障害物にぶつかったり、駐車スペースからはみ出してしまったりすることをなくす。
【解決手段】スマートキー20に車両本体を前後左右へ移動させるためのキースイッチ21〜24を設ける。このキースイッチ21〜24の操作により車両本体を駐車スペース内に移動させてゆく際、車両本体の周辺を4台の撮影用カメラ16〜19により撮影し、所定距離以内に障害物がないかどうか、駐車スペースの境界を示す白線からはみ出していないかどうかを自動的に確認し、障害物や駐車スペースからのはみ出しがあった場合、電磁ブレーキ26〜29を動作させて車両本体を停止させる。
(もっと読む)
車両用走行制御装置
【課題】トライバの好みに応じた横加速度に設定する。
【解決手段】前方道路のカーブ状態と横加速度設定値とに基づいて前方道路のカーブにおける目標車速を演算し、この目標車速に基づいて目標減速度を演算して車両の減速制御を行う車両用走行制御装置において、横加速度設定値を切り換える横加速度切り換え手段を設け、横加速度設定値を横加速度切り換え手段により切り換えられた値に変更する。
(もっと読む)
運転者状態推定装置及び運転支援装置
【課題】生体情報が正常に測定できない場合であっても、生体情報に基づいた運転者の状態の推定を行う。
【解決手段】ドライバの生体情報を計測し、正常に生体情報が計測できている場合には、計測した生体情報からドライバの状態(正常状態、覚醒度低下等)を推定する。一方、推定したドライバの状態に対応して、正常に生体情報を計測した際の運転状況(車両情報と環境情報)を蓄積することで、生体情報に基づくドライバ状態を運転状況から推定するドライバモデルを構築しておく。ドライバの生体情報の検出が正常である場合には、計測した生体情報に基づいて現在のドライバの状態を推定し、正常でない場合には、ドライバモデルを使用して現在の運転状況からドライバの状態を推定する。
(もっと読む)
車両の運転支援制御装置および方法
【課題】カメラ等を用いた前方認識装置2の出力情報に基く運転支援を、前方の道路形状により見通しが悪くても、安全に実行できる車両の運転支援装置を実現すること。
【解決手段】ナビゲーション装置1と、車両周辺の状況を撮影し特定の対象物までの距離と相対速度を算出できるカメラ等を用いた前方認識装置2と、車両走行状態を取得する車両に搭載されているセンサ群とを備え、前記ナビ装置1または前記カメラ等を用いた前方認識装置2から得られた走行環境情報によって、前記カメラ等を用いた前方認識装置の出力情報を基にした運転支援制御を継続するか中断するかを判定する。もし、それらセンサ群の情報により視認性が悪いと判断した場合は前記前方認識装置の出力情報を基にした運転支援制御を中断する。
(もっと読む)
異常検出装置
【課題】走行状態制御装置にて算出された制御要求トルクに基づいて構成要素制御装置に制御目標トルクを指令するように構成された統合制御装置の異常を、より正確に検出できる異常検出装置を提供することを目的とする。
【解決手段】エンジンECU20の演算処理部22には、仮想データが記憶されたメモリ22aが設けられており、演算処理部22は、車両のイグニッションスイッチがオフであると判断すると、メモリ22aに記憶された仮想データを、各目的別ECUからの要求駆動トルクに代えてマネージャECU10に2回送信する。そして、マネージャECU10が、夫々の仮想データに基づいて目標駆動トルクを設定すると、設定された2つの目標駆動トルクが一致するか否かを判断し、一致しない場合にマネージャECU10の異常を判定する。
(もっと読む)
運転支援装置
【課題】運転者が車両を一時停止させるか否かを精度よく判別することができ、適切な運転支援を提供することが可能な運転支援装置を提供する。
【解決手段】本発明の一実施形態に係る運転支援装置1は、一時停止位置の手前における運転者の運転操作を支援する支援手段34,22と、一時停止位置に対する運転者の注視行動を検出する注視行動検出手段20,16とを備え、支援手段34,22は、注視行動検出手段20,16により検出される車両減速中における注視行動の有無に応じて、運転操作の支援仕様を切り替える。
(もっと読む)
車両の制動力制御装置
【課題】 種々の車両の前後方向の加減速度制御の要求に基づいて、車両の駆動系装置及び制動系装置の作動を統合的に制御しようとする場合に有利に用いられる車両用の制動力制御装置を提供すること。
【解決手段】 車両の制動力制御装置100は、車両全体に於いて発生されるべき要求制駆動力を取得する手段100,200と、駆動系装置に於いて発生可能な制駆動力を取得する手段100,210と、制動系装置の作動を制御する手段100,220とを含み、駆動系装置に於いて発生可能な制駆動力に応じて制動系装置を作動させることを特徴とする。
(もっと読む)
車両の走行制御装置
【課題】先行車両と自車両との車間距離の変化の度合いに応じて適切な自車両の加減速度を設定して乗員が違和感を感じないようにすることを課題とする。
【解決手段】自車両前方の先行車両と自車両との車間距離が目標車間距離を維持するように自車両の走行状態を制御する制御ユニット40は、先行車両と自車両との車間距離と目標車間距離との偏差に基いて自車両の基本加減速度を設定し、先行車両と自車両との車間距離の変化の度合いを検出し、基本加減速度を車間距離の変化の度合いに基いて補正することにより自車両の最終加減速度を設定し、そして、その最終加減速度で自車両の走行状態を制御する。
(もっと読む)
車両用走行制御装置
【課題】本発明は、車両用走行制御装置に係り、車両運転者の脇見時にも車両の安全走行を確保することにある。
【解決手段】車両運転者によりメインスイッチがオン操作された場合(ステップ100の肯定判定時)に、自車両を走行車線に沿って走行させる車線維持制御の実行を許可する(ステップ102)。また、顔向きカメラによる撮像画像を処理することにより運転者が顔を車両正面方向に向けない脇見状態の有無を判別する。そして、メインスイッチがオン操作されていない状況において、車両運転者が脇見状態にあると判別される場合(ステップ104の否定判定時)にも、車線維持制御の実行を許可する(ステップ102)。
(もっと読む)
車両用走行制御装置
【課題】本発明は、車両用走行制御装置に係り、車両運転者の脇見時にも車両の安全走行を確保することにある。
【解決手段】車両運転者によりクルーズコントロールスイッチがオン操作された場合に、自車両を先行車両に追従して走行させる車間制御の実行を許可する。また、顔向きカメラによる撮像画像を処理することにより運転者が顔を車両正面方向に向けない脇見状態の有無を判別する。そして、クルーズコントロールスイッチがオン操作されていない状況において、車両運転者が脇見状態にあると判別される場合にも、車間制御の実行を許可する。
(もっと読む)
21 - 40 / 311
[ Back to top ]