
Fターム[3D046BB17]の内容
ブレーキシステム(制動力調整) (22,399) | 目的、効果 (3,539) | 走行時の速度制御 (711)
Fターム[3D046BB17]の下位に属するFターム
Fターム[3D046BB17]に分類される特許
301 - 311 / 311
ブレーキ制御装置
【課題】 必要以上の燃料消費を抑えつつ、障害物や急坂を乗り越えた際の空走距離を短縮したブレーキ制御装置を提供する。
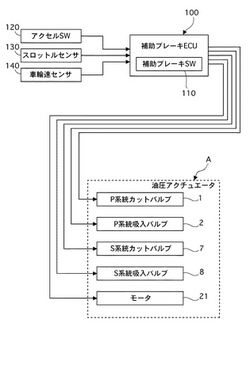
【解決手段】 ホイルシリンダ内の液圧を自動的に増圧・減圧できるブレーキアクチュエータを備えたブレーキ制御装置において、アクセルのオン・オフを検出するアクセルスイッチと、前記アクセルのオフ状態に対応した前記アクセルスイッチの信号に応じて前記ホイルシリンダ内の液圧を増圧し、前記アクセルのオン状態に対応した信号に応じて前記ホイルシリンダ内の液圧を減圧する補助ブレーキ手段と、前記補助ブレーキ手段の実行・解除を行う補助ブレーキ選択手段とを備えることとした。
(もっと読む)
車両の道路適応走行制御装置

【課題】 自車両の進行方向の道路状況を的確に把握し、適切な走行支援を行う。
【解決手段】 道路形状認識部26は、地図データ記憶部14に格納された地図データと、外界監視装置11の検知結果とに基づき、自車両の進行方向の道路形状を認識する。道路状況推定部27は、道路形状認識部26にて認識した道路形状を走行する他車両に対して、対象物走行情報抽出部21にて抽出された走行情報や道路状態および対象物走行軌跡算出部22にて算出された走行軌跡に基づき、自車両が走行予定の道路の道路状況を推定する。走行情報比較部30は、道路状況推定部27にて推定した道路状況を適正に通過可能な適正車両状態(適正速度VS)と自車両の走行状態(現在速度VP)とを比較し、走行支援判定部31は、自車両の走行状態が適正車両状態になるように制動装置16および警報装置17を作動させる。
(もっと読む)
車両の減速制御装置
【課題】ブレーキを用いた車両の減速制御技術において、ブレーキの利用による効果が十分に得られる車両の減速制御装置を提供する。
【解決手段】ブレーキ200による制動と、変速機10を相対的に低速用の変速段又は変速比に変速する変速動作とにより減速制御を行う車両の減速制御装置であって、路面の滑り易さが所定値よりも大きくないとき(ステップSA10−N)には、路面の滑り易さが前記所定値よりも大きいとき(ステップSA10−Y)に比べて、前記ブレーキによる制動力に占める前記ブレーキにより後輪に加えられる制動力の割合が大きくされる。前記ブレーキによる制動力に占める前記ブレーキにより後輪に加えられる制動力の割合が大きい場合には、前記ブレーキにより前輪に加えられる制動力がゼロである場合が含まれることが可能である。
(もっと読む)
4輪駆動車の制御装置
【課題】電動パーキングブレーキによって減速を行う際に問題となる、最大制動力の低さと、車両の不安定化を有効に防止する。
【解決手段】電動パーキングブレーキ制御部24は、ブレーキ制御部22から車両挙動を修正させる信号が入力されると、電動パーキングブレーキ30が作動している場合には電動パーキングブレーキ30の作動を解除し、また、主ブレーキ系統異常によるブレーキ制御量が入力されたると、そのブレーキ制御量を発生させるべく電動モータ29rl、29rrを駆動させる。更に、ACCシステム25から電動パーキングブレーキ30のブレーキ制御量が入力された場合には、そのブレーキ制御量を発生させるべく電動モータ29rl、29rrを駆動させる。そして、前後駆動力配分制御部18は、電動パーキングブレーキ30が作動している際には前軸と後軸とを直結させる。
(もっと読む)
車線逸脱防止装置
【課題】運転者に違和感を与えることなく、車線逸脱防止制御を行える。
【解決手段】方向指示スイッチ20がオフ状態の場合、操舵介入の有無判定(ステップS11)、過去の方向指示スイッチ20の操作の有無判定(ステップS12)、過去の戻し操舵操作の有無判定(ステップS13)及び隣接車線の有無を判定(ステップS14)する。これにより、逸脱傾向があり、かつ直近に方向指示スイッチ20が操作されており、かつ戻し操舵操作されている場合、ヨーモーメントを小さくして車線逸脱防止制御を行う。
(もっと読む)
車両連結装置
【課題】前後に並ぶ自走車両を所定の間隔に保持可能な車両連結装置を提供する。
【解決手段】隊列先頭の自走車両7の後端に接続した外筒2にボールスクリュー3を枢支し、このボールスクリュー3に螺合したナット5を、後続の自走車両9の前部に接続した内筒4に固着し、ボールスクリュー3の回転を拘束し得るディスクブレーキ6、及び前後の自走車両7,9の間隔が変動したときに、車速を調整するコントローラ14を装備している。
すなわち、ディスクブレーキ6によりボールスクリュー3の回転を拘束してナット5の移動を抑え、自走車両7,9の間隔を固定する。
あるいは、コントローラ14により車速を調整して自走車両7,9の間隔の変動を直ちに止める。
(もっと読む)
車両の長手方向の移動を制御する方法
本発明は、特に長手方向移動制御システムを用いて、車両(3)の長手方向の移動を制御する方法に関する。閾値速度を超える車速については、前方走行車両(8)が検出されない場合は、車速はより高い選択された設定速度に調整され、前方走行車両(8)が検出された場合は、この前方走行車両(8)からの距離が調整される。車両が閾値速度未満の速度で走行している場合は、前方走行車両(8)が検出された場合にのみ、車両(3)の長手方向の移動が制御される。この結果、車間距離制御システムが、比較的大きい速度範囲に渡って実施され得る。  (もっと読む)
(もっと読む)
追従間隔制御を改良する方法
【課題】
追従間隔制御の快適性と安全性を向上させること。
【解決手段】
車両の追従間隔制御システムを改良する方法では、追従間隔制御の制動圧要件に車両の電子式制動制御システムのシステム制御が比較的にゆっくりな速度で行われるので、最高圧力増加率或いは減少率は超過しない。代用として、制動圧積分によりあらかじめ制動制御の計画が行なわれる。  (もっと読む)
(もっと読む)
間隔警告システムを有する自動車内の疲労警告装置
運転者の疲労状態を検出するための運転者センサ技術(20)と間隔警告システムとを有しており,その間隔警告システムは環境センサ技術を有し,かつ,前を走行する車両に対する警告間隔を下回った場合に警告信号を出力し,および/または車両の駆動システムおよび/またはブレーキシステム(14,16)へ制御介入を行うように形成されている,自動車内の疲労警告装置は,間隔警告システムが調節装置(22)を有しており,その調節装置は,検出された疲労状態(E)に従って警告間隔を変化させるように形成されていることを特徴としている。 (もっと読む)
車間距離制御装置
【課題】先行車に対する車間距離制御を行う車間距離制御装置において、先行車の発進に追従して発進した際に不必要な自動減速が行われるのを防止してスムーズな発進を可能にする。
【解決手段】所定時間判定手段M9が、セットスイッチ17あるいはリジュームスイッチ18が操作されて自車が車間距離制御を開始してから所定時間内にあると判定し、かつ接近状態判定手段M8が、先行車との車間距離が車頭時間および自車の車速に基づいて設定した目標車間距離未満であると判定すると、目標車間距離設定手段M4が前記目標車間距離を車間距離検出手段M2で検出した実際の車間距離に変更するので、自車が先行車に続いて発進して車間距離制御を開始した直後に、目標車間距離と実際の車間距離との差が大きいために自動減速が行われるのを防止し、発進後のスムーズな加速を可能にしてドライバーの違和感を解消することができる。
(もっと読む)
車両制御装置、プログラム及び方法
【課題】運転者のブレーキタイミングの特性や車両を取り巻く状況に柔軟に対応することができる車両制御を提供する。
【解決手段】車両制御装置は、自車両の外部の画像を撮影する撮影手段と、他車両の接近を検出するためのテンプレートを記憶するテンプレート記憶手段を有する。テンプレートは、運転者のブレーキ操作に基づいて適宜更新される。車両制御装置は、撮影した画像とテンプレートとを比較して、前方を走行する車両が相当接近してきたために、自車両の減速や停止が必要であるか否かの判断を行う認識処理手段をさらに有している。認識処理手段によって減速や停止が必要と判断され、かつ、運転者によってアクセルペダルを戻したりブレーキペダルを踏むなどの衝突回避の操作が行われなかった場合は、動作指示手段によって自車両に衝突回避操作を実行させる。
(もっと読む)
301 - 311 / 311
[ Back to top ]