
Fターム[3D046BB17]の内容
ブレーキシステム(制動力調整) (22,399) | 目的、効果 (3,539) | 走行時の速度制御 (711)
Fターム[3D046BB17]の下位に属するFターム
Fターム[3D046BB17]に分類される特許
101 - 120 / 311
エンジン制御装置及びエンジン制御方法
【課題】エンジン制御においてアイドル条件が成立しても車速の調整を容易にし、かつ無駄なエネルギーの消費を減少させる。
【解決手段】本発明のエンジン制御装置においては、渋滞などの影響で車両がアイドリング状態でクリープ走行しているような場合でも、基本的にエンジン回転数に基づく回転数制御ではなくオートクルーズ制御が行われる。このため、車両が低速域で走行している場合にも車速の微調整が容易になる。その結果、基本的にブレーキ制御を伴わないか或いはブレーキ制御が抑制され、車両の低速走行時における無駄なエネルギーの消費を減少させることができる。
(もっと読む)
車両の制御装置

【課題】例えばトンネル内において火災が発生した場合には、トンネル内が高温になるため、車両がトンネル内に進入すると危険である。
【解決手段】受信装置7の制御信号T3に基づいて、車両8の装置6を制御する信号T13,T23,T33を出力させることができ、前記信号T13,T23,T33の出力が、車両8の目標となる速度に応じて基準値設定手段83に設定され、基準値設定手段83から読み込まれる基準値tと車速検出手段81によつて車両の走行速度を検出した車速信号T4とを比較手段82によつて比較し、車両8の速度が目標となる速度よりも大きいときになされると共に、車両8の速度が目標となる速度よりも小さいときは、前記信号T13,T23,T33を出力させることなく、前記信号T13,T23,T33を出力させる制御を終了する。
(もっと読む)
自動運転制御装置、及びそれを搭載した車両
【課題】周囲の車両の位置や走行状態などを自車両において自動的に検知し、その結果に基づいて自車両を自動的に制御する自動運転制御装置の提供。
【解決手段】周囲の車両の情報を受信する車車間通信部11と、車車間通信部11で受信した周囲の車両の情報に基づいて自車両の走行速度を演算するボイド演算部23と、ボイド演算部23で演算した走行速度に基づいて自車両の走行を制御する車両走行制御部20とを備えることにより、周囲の車両の情報に基づいて自車両がどのような走行速度で走行するのが一番安全で効率的かを自動的に演算し、その結果に基づいて自車両の走行が制御されるため、自車両を周囲の車両の情報に合わせて自立的に適正に走行させることが可能になる。
(もっと読む)
作業車両
【課題】緊急時には、機械的なガタに影響を受けることなく、迅速かつ確実に機体を停止作動させることができるようにする。
【解決手段】左右の走行装置5を増減速駆動する走行変速装置14と、左右の走行装置5を少なくとも減速駆動する操向変速装置15とを備えると共に、走行変速装置14及び操向変速装置15を、それぞれ静油圧式無段変速装置24、25を用いて構成した走行機体1であって、走行変速装置14の斜板コントロールバルブ37を操作する主変速レバー43と、操向変速装置15の斜板コントロールバルブ36を操作するステアリングホイール7と、各斜板コントロールバルブ36、37が作動させるサーボシリンダ38、39を直接的に中立位置に戻すことによって機体を停止させる緊急停止手段とを備える。
(もっと読む)
車両用運転操作補助装置および車両用運転操作補助装置を備えた車両
【課題】運転者の運転意図に反した挙動を示すことのない車両用運転操作補助装置を提供する。
【解決手段】車両用運転操作補助装置は、自車両と前方障害物との車間時間および余裕時間に基づいて自車両のリスクポテンシャルを算出する。リスクポテンシャルが大きいほど、自車両に発生する駆動力を低下するとともに、アクセルペダルを操作するときに発生する操作反力を増大させる。アクセルペダル操作パターンから運転者の運転意図を検出し、加速意図が小さいほど、制駆動力制御における駆動力の低下量が大きくなるように補正する。
(もっと読む)
車両制御装置及び方法
【課題】自車両の減速後の予想走行状態等に応じて適切に減速手段を決定することにより、運転者に違和感を与えることなく自車両を減速させる制御を行うことが可能な車両制御装置及び方法を提供する。
【解決手段】道路情報及び現在車速に基づいて、自車両が減速する必要がある場合に、減速目標点及び目標車速を決定し、現在車速及び目標車速と、減速目標点までの距離とに基づいて、エンジンブレーキにより適切な減速を行うための変速機構の変速比を決定し、決定された変速比で目標車速まで減速したときの自車両の走行状態量が、エンジンブレーキが作用する走行状態量の下限値を基準として定めた所定の状態閾値以上である場合に、エンジンブレーキを用いた減速制御を行うことを決定する。
(もっと読む)
制御ブースタ
【課題】ブレーキペダルからの入力とは別にコントローラによって自動制御可能な制御ブースタにおいて、自動制御時におけるブレーキペダルへの入力の有無を判定する。
【解決手段】ブレーキペダル30によって入力ロッド16を操作し、制御バルブ15によって変圧室4B、5Bに大気(正圧)を導入し、定圧室4A、5A(負圧)との間に生じる差圧によってサーボ力を発生させる。また、コントローラ39によってソレノイド23に通電して自動ブレーキ装置22を作動させて、制御バルブ15を操作することによって制動力を制御する。ピン29と長穴34との係合によって入力ロッド16とブレーキペダル30とを相対変位可能とし、ペダル変位センサ35及びロッド変位センサ36によって、ブレーキペダル30と入力ロッド16との相対変位を検出し、この相対変位に基づいて、自動ブレーキ装置22の作動時におけるブレーキペダル30への入力の有無を判定する。
(もっと読む)
車両制御装置
【課題】自車両が車間距離制御中又は定速走行制御中の周辺車両交通の円滑さを向上させる車両制御装置を提供すること。
【解決手段】車両に搭載され、車間距離制御及び定速走行制御を行う車両制御装置が、車間距離制御中又は定速走行中に自車両後方から自車両を追い越そうとしている車両が検出されたとき、自車両の車速を抑制する。本車両制御装置は、自車両後方に検出された後続車両が自車両と同一の車線から隣接車線へ車線変更し、且つ、当該後続車両の車速が自車両の車速より大きく、且つ、自車両と当該後続車両との車間時間が所定値以下となったとき、当該後続車両を上記自車両を追い越そうとしている車両であると判断する。
(もっと読む)
車両の追従走行制御装置
【課題】 制御を簡素化するとともに、走行制御が定速走行制御と追従走行制御との間で切り替わることによる違和感を低減することができる車両の運転支援装置を提供する。
【解決手段】 走行制御ユニット5は、ステレオ画像認識装置4で先行車を検出していないとき、ドライバによる設定車速で定速走行する仮想的な先行車(ダミー先行車)を設定するとともに当該ダミー先行車に係る各種情報(ダミー先行車情報)を演算し、ダミー先行車情報に基づいてダミー先行車に対する追従走行制御を行うことで結果的に定速走行制御を実現する。これにより、単一の走行制御(追従走行制御)によって定速走行制御と追従走行制御とを実現することができ、制御を簡素化するとともに、走行制御が定速走行制御と追従走行制御との間で切り替わることによる違和感を低減することができる。
(もっと読む)
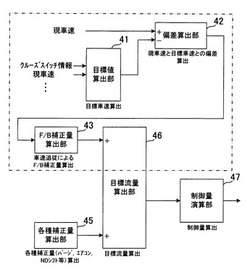
車両用制動制御装置
【課題】車両用制動制御装置において、回生制動力を考慮して油圧制動力を設定することで高精度な制動力制御を可能とする。
【解決手段】乗員が操作するブレーキペダル27のペダルストロークSpに基づいて目標制動力Ptを設定し、この目標制動力Pを車両の走行状態に応じて目標回生制動力Pmtと目標油圧制動力Pbtに分配し、目標回生制動力Pmtに基づいて電気モータ12を制御して回生ブレーキを作動すると共に、目標油圧制動力Pbtに基づいて油圧制御部25を制御して油圧ブレーキ24を作動するように構成し、車両の減速度Grから回生制動力Pmrを除いた油圧ブレーキ減速度と油圧制動力Pbrとの偏差に基づいて油圧ブレーキ24の効き度合Erを判定し、ブレーキ効き度合Erに基づいてブレーキ効き補正値kを設定し、目標油圧制動力Pbtを補正する。
(もっと読む)
制御装置及び車両
【課題】車両の状況に応じた適切な制動力を付与できる制御装置、及びそのような制御装置を備えた車両を提供すること。
【解決手段】本発明の制御装置及び車両によれば、制動状況判断手段によって車両を制動すべき状況である判断された場合に、該状況に応じた制動力を得るために必要とされる舵角の値が、制御トー角取得手段により取得される。そして、アクチュエータ作動手段により、少なくとも1輪の車輪が、取得された舵角でトーイン又はトーアウトされるように、アクチュエータが作動される。よって、車両の状況(例えば、降坂路の傾斜勾配や、カーブの曲率半径や、前方を走行する車両との相対的位置関係など)に応じて適切な制動力を付与することができる。
(もっと読む)
車両の走行制御装置
【課題】自車両を先行車両に追従走行させる追従走行制御中に、先行車両が頻繁に加減速を繰り返しても、それに追従して自車両が頻繁に加減速を繰り返すことを防止する。
【解決手段】追従走行制御(車間距離制御)中に、先行車両の所定時間当たりの加減速回数が判定値以上であるか否かで、先行車両が頻繁に加減速を繰り返しているか否かを判定し、先行車両が頻繁に加減速を繰り返していると判定された場合は、実車間距離が「目標車間距離−α」から「目標車間距離+β」までの範囲に設定された不感帯内であれば、定速追従制御に切り換えて車両の車速を一定車速に維持するように自車両を制御する。これにより、先行車両が頻繁に加減速を繰り返しても、それに追従して自車両が頻繁に加減速を繰り返すことを防止する。その後、実車間距離が不感帯から外れたときに、通常の車間距離制御に戻して実車間距離を目標車間距離に維持するように自車両を制御する。
(もっと読む)
車両用運転操作補助装置および車両用運転操作補助装置を備えた車両
【課題】アクセルペダル反力発生装置の故障時にも運転者に違和感を与えることのない車両用運転操作補助装置を提供する。
【解決手段】車両用運転操作補助装置は、自車両の前方障害物に対するリスクポテンシャルを算出し、リスクポテンシャルが大きいほど、自車両に発生する駆動力を低下するとともに、アクセルペダルを操作するときに発生する操作反力を増大させる。アクセルペダルにリスクポテンシャルに応じた反力を付加する反力発生装置の故障が検出されると、アクセルペダルを踏み込んでもエンジントルクが増大しないようにエンジントルク特性を補正する。
(もっと読む)
車両用減速制御装置
【課題】アクセル操作状態に応じて制動力を付与する場合において、好適な付加制動量を決定できる車両用減速制御装置を提供する。
【解決手段】アクセル戻し時のアクセル初期開度に応じて、さらには、アクセル戻しスピードに応じて、エンジンブレーキ制動量を変化させる。つまり、アクセル初期開度が大きいほど、もしくは、アクセル戻しスピードが大きいほど、エンジンブレーキ制動力を大きな値とする。これにより、ドライバの制動意思に対応した適切な付加制動量を求めることが可能となる。
(もっと読む)
走行制御装置
【課題】ナビゲーションシステムのマップマッチングにより、自車両の前方直前にカーブ
入口を検出したときでも、減速制御を行うことができる。
【解決手段】走行制御装置は、ナビゲーションシステムにおけるマップマッチングによって、地図上の自車両走行位置が、自車両が走行していると予測される道路上に移動したことを検出するマップマッチング検出部35と、マップマッチング検出部35が前記自車両走行位置の前記道路上への移動を検出した場合、前記移動後の自車両走行位置が、前方のカーブに対して減速制御を行う位置か否かを判定する位置判定部36と、位置判定部36が減速制御を行う位置であると判定した場合、前記前方のカーブとの位置関係に基づいて、減速制御手段(ブレーキ液圧指令部34等)による減速度を増加させる減速制御補正部37とを備える。
(もっと読む)
車間距離制御装置
【課題】自車両と先行車両との車間距離を制御する際に乗員が自車両の走行挙動に違和感を感じてしまうことを防止する。
【解決手段】走行制御部25は、先行車両と自車両との間の実車間距離を目標車間距離に収束させる際に、運転者の加速意志が運転意志検出部23により検出された場合には、加速意志が検出されない場合に比べて、オーバーシュート量が増加するように収束特性を変更し、運転者の減速意志が運転意志検出部23により検出された場合には、減速意志が検出されない場合に比べて、オーバーシュート量が減少するように収束特性を変更する。
(もっと読む)
車両用制動制御装置
【課題】自動ブレーキ中に運転者によりブレーキペダルが操作されたときの減速度変化を緩やかにする車両用制動制御装置を提供すること。
【解決手段】車両において、所定の条件が満たされたときに運転者によるブレーキペダル操作によらず自動ブレーキを掛ける車両用制動制御装置が、自動ブレーキ中に運転者によりブレーキペダルが操作されたとき、自動ブレーキ制御が発生させようとするブレーキ圧と運転者によるブレーキペダル操作に比例したブレーキ圧の所定割合とを足し合わせた第一のブレーキ圧と、運転者によるブレーキペダル操作に比例した第二のブレーキ圧とを大小比較し、ブレーキ圧の大きさを第一のブレーキ圧及び第二のブレーキ圧のうち大きい方の値に制御する。
(もっと読む)
車両用自動制動装置
【課題】例えばエンジンブレーキが生じているときに摩擦ブレーキによる自動制動制御が行われた場合にも、滑らかなブレーキフィーリングを確保する。
【解決手段】車輪WL,WLに対し駆動トルクを付与するトルク付与手段TAと、これらの車輪に生ずるトルクを抑制するトルク抑制手段TRと、運転者によるブレーキペダルBPの操作に応じて各車輪に対し制動トルクを付与する摩擦ブレーキ手段FBと、ブレーキペダル操作とは独立して摩擦ブレーキ手段を自動的に駆動して制動トルクを付与する自動ブレーキ制御手段ABを備える。この自動ブレーキ制御手段による制動トルクの付与開始後、摩擦ブレーキ手段による制動トルクの付与が開始したときには、トルク抑制制御手段CLにて、抑制トルクを所定値に保持するように制御する。
(もっと読む)
運転支援装置
【課題】円滑かつ操作性に優れるとともに、安全性の高い運転操作支援を実現する運転支援装置を提供する。
【解決手段】車両20を目標位置Pまで自動的に速度制御しながら移動させる運転操作支援を実行するとともに運転操作支援を予め設定した条件に基づき解除する運転支援装置において、車両20の移動速度を自動制御する速度制御手段13と、車両20が目標位置Pに達したときに車両20を自動停止させる停止手段15とを備え、速度制御手段13は、車両20の移動速度を目標速度に一致させる速度制御モード13aと、目標位置Pに停止させるため車両20の移動速度を漸次減速させる停止制御モード13bとを有するとともに、目標速度が段階的に複数設定され、車両20の乗員の操作に基づき当該目標速度を変更する目標速度変更手段13cを備えた。
(もっと読む)
走行制御装置
【課題】減速走行制御において、適切な目標減速度の設定による、追突や不必要に強い制動力による危機感や不安感の解消を図る。
【解決手段】減速度設定部63は、目標減速度αa'を、車速Vaに応じた所定の目標車間距離lを確保すること、自車速Vaを先行車速Vfまで落とすこと、および、自車と先行車とは、仮にともに現在の減速度を維持したとき同時に停止することを条件として満たすように構成された関係式から導く。この関係式は、自車の速度Va、車間距離L、目標車間距離l、先行車の速度Vfおよび先行車の減速度αfと、自車の減速度αa'との間の対応関係を示す。制動指示部65は、この目標減速度αa'に基づいて、ブレーキ駆動部3b、スロットルバルブ1aに対して指示を送り、これによって減速を制御する。
(もっと読む)
101 - 120 / 311
[ Back to top ]