
Fターム[3D046HH05]の内容
ブレーキシステム(制動力調整) (22,399) | 検出対象及び検出手段 (8,844) | アクセルペダル操作 (607)
Fターム[3D046HH05]に分類される特許
1 - 20 / 607
踏み間違えるとアクセルペダルがブレーキペダルなる。
【課題】急な上り坂等も、走行可能である、停車時、又低速で、アクセルペダルを強く踏み込むと、エンジンが停止し、ブレーキが掛かる。
【解決手段】アクセルペダルが、B点通過後、低速になっても走行可能である、運転者がパニックを起こし、アクセルペダルを、ブレーキペダルと間違えて強く踏み込むと、エンジンを停止し、ブレーキを掛ける。
(もっと読む)
電動車両の停止制御方法

【課題】廉価なホールICを用いて、しかも、誤差成分の影響を最小にして高精度に電動車両の停止制御を行うようにする。
【解決手段】電動車両100は、操作レバー82と、車軸102と、操作レバー82からの操作指示に基づいて回転制御されるモータ10と、モータ10の回転力を車軸に伝達する伝達機構106と、モータ10の回転を制動するための電磁ブレーキ108と、モータ10の回転に伴って生成される一連のパルス信号に基づいてモータ10の回転速度を検出する速度検出回路50を有する。そして、操作レバー82からの操作指示がモータ10の回転停止を示し、且つ、モータ10の回転が電子制御ユニット104によって減速制御される時点から、速度検出回路50からのパルス信号の2回の立ち下がりを経過した時点を、モータ10の回転を電磁ブレーキ108によって停止させる契機の基準時点とする。
(もっと読む)
駐車支援装置
【課題】駐車支援中に車両の操舵遅れ等が発生した場合の目標走行軌跡の修正可能な範囲を大きくすること。
【解決手段】設定された目標駐車位置に設定された目標駐車方向で車両が駐車されるような目標走行軌跡を算出し、該算出した目標走行軌跡に基づいて、駐車状態に至るまでの操舵を支援する駐車支援装置において、走行距離に対する車両の旋回曲率の変化率に関して、実現可能な最大旋回曲率変化率に対して所定の余裕分を設けた上限旋回曲率変化率を設定し、前記設定した上限旋回曲率変化率を超えないような曲率変化率範囲で成立する前記目標走行軌跡を算出することを特徴とする。
(もっと読む)
制動力制御装置及びブレーキペダル操作形態推定装置及びブレーキペダル装置
【課題】より適切な制動制御を実行させること
【解決手段】車輌の目標車輌制動制御値を算出する目標車輌制動制御値算出手段1aと、その目標車輌制動制御値に基づいて制御対象の車輪10FL,10FR,10RL,10RRの目標車輪制動制御値を算出する目標車輪制動制御値算出手段1bと、その目標車輪制動制御値を該当する車輪に対して発生させるよう制動装置(ブレーキアクチュエータ45)の駆動制御を行う制動装置制御手段1cと、ブレーキペダル20のペダル踏面上の押圧力を検知する押圧力検知手段(感圧素子23A1,23A2)と、その検知結果に基づいてペダル踏面の押圧分布を算出する押圧分布算出手段1fと、そのペダル踏面の押圧分布の変移に基づいてブレーキペダル20の操作形態を推定するペダル操作形態推定手段1dと、この推定された操作形態に応じて目標車輌制動制御値を補正する目標車輌制動制御値補正手段1eと、を備えること。
(もっと読む)
車両の運動制御装置
【課題】車両の運動制御装置において、電動モータの回転数を低下させてもホイールシリンダに対する増圧応答性を適切に得る。
【解決手段】車両の運動制御装置は、モータ制御手段(306,314)が電動モータ33の回転数を低下させる場合、弁制御手段(ステップ312,314)が、マスタシリンダとホイールシリンダとの間に介在する液圧制御対象の増圧弁を駆動してホイールシリンダ側に流出される単位時間あたりのブレーキ液の流量を増大させる。
(もっと読む)
電動パーキングブレーキ制御装置、電動パーキングブレーキ装置、及び、電動パーキングブレーキ制御装置の制御方法
【課題】目標張力の低下を防止すると共に、ケーブルを巻き上げるアクチュエータの小型化等の省力化が可能な電動パーキングブレーキ制御装置等を提供すること。
【解決手段】車輪の駐車ブレーキユニット35R、35Lにそれぞれ接続されたケーブル34R、34Lを巻き上げる電動PKBアクチュエータ30と、車輪のサービスブレーキによる制動圧を制御するブレーキアクチュエータ10と、を制御する電動パーキングブレーキ制御装置9において、所定の目標張力になるまでケーブルを巻き上げた後、目標張力未満に張力が低下した場合、ブレーキアクチュエータ10を制御して制動圧を所定値まで増圧する増圧制御手段9aと、増圧制御手段により増圧した後、電動PKBアクチュエータ30を制御して目標張力よりも大きい張力になるまでケーブルを巻き上げる張力増大制御手段9bと、を有することを特徴とする。
(もっと読む)
四輪駆動車の制御装置
【課題】四輪駆動を維持したまま、四輪駆動車の副駆動輪への駆動力伝達系の自励振動の発生防止又は抑制を図ることができる四輪駆動車の制御装置の提供。
【解決手段】エンジンの駆動力を車輪に伝達する駆動力伝達系の自励振動を制御する四輪駆動車の制御装置であって、自励振動の発生又は発生の予兆を検知する自励振動検知手段1と、自励振動検知手段1によって自励振動の発生又は発生の予兆が検知された場合に、ブレーキペダル操作と独立に、四輪駆動車の主駆動輪及び/又は副駆動輪に所定の制動力を作用させる制動力制御手段2とを備える。
(もっと読む)
駆動トルク伝達システム
【課題】デファレンシャル装置において、アクチュエータの電気的な作動制御に対応する機械的な進展を図ることを可能とする。
【解決手段】エンジン11からの駆動トルクを前輪17,19に分配して伝達可能なフロント・デファレンシャル装置3と、分配アクチュエータにより動作して分配を調整するトルク配分調整機構5と、分配アクチュエータの作動を制御するコントローラ7とを備えた駆動トルク伝達システム1であって、差動歯車機構9は、駆動トルクの入力を受けるデフ・ケース21と、デフ・ケース21と共に公転可能に支持され且つ自転可能な円筒状のピニオン・ギヤ23と、ピニオン・ギヤ23にそれぞれ噛み合い配置され相対回転可能な一対のフェース・ギヤ25,27とからなることを特徴とする。
(もっと読む)
車両およびその制御方法
【課題】電動機による制動力と油圧ブレーキなどの制動力を付与する装置による制動力とを置き換える際に生じ得る異音の発生を抑制すると共に低車速時における乗り心地を良好に保持する。
【解決手段】車速Vが閾値Vref未満に至った以降に、途中でレート値を変更してモータの回生トルクの油圧ブレーキによる制動力への置き換えが行なわれるようモータトルクTm2と油圧ブレーキによるブレーキトルクTbとを置き換える。これにより、車速Vが閾値Vrefより若干小さな車速でモータから大きな回生トルクを出力する状態に生じ得るモータからの異音の発生を抑制することができ、制動力の置き換えをスムーズに行なうことにより低車速時における乗り心地を良好に保持することができる。
(もっと読む)
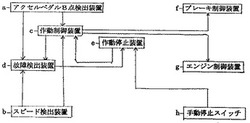
自動車の運転におけるアクセルペタルの踏み間違いによる緊急自動停止装置。
【課題】従来、自動車の運転において、アクセルペタルとブレーキペタルの操作は、右足で別々に操作し通常の運転では問題ないが、突作の場合アクセルペタルをブレーキペタルと間違え、そのまま、急激に踏込んでしまう場合、事故になるケースがあり、その場合にのみ自動制動が働き、急停車するようにした。
【解決手段】アクセルペタルの動きを2個のセンサ、速度センサ3、近接センサ4で異常な動きをキャッチし、その信号により、モータを駆動し、自動制御でブレーキ操作するようにした。
(もっと読む)
車両の制御装置、制御方法、その方法を実現するプログラムおよびそのプログラムを記録した記録媒体
【課題】運転者による加速要求の度合いに基づいてブレーキホールド制御が解除される車両において、無駄なエネルギ消費を削減するとともに、ブレーキホールド制御解除時の車両の急発進を抑制する。
【解決手段】ECUは、ブレーキホールド制御中であると(S100にてYES)、運転者による加速要求の制御上の度合いとして駆動力の出力制御に用いられる制御アクセル開度を0に設定するステップ(S102)と、運転者による加速要求の実際の度合いである実アクセル開度が予め定められた開度A(0)より大きいと(S106にてYES)、運転者による加速要求があると判断するステップ(S112)と、ブレーキホールド制御の解除指令を出力するステップ(S114)と、制御アクセル開度を実アクセル開度に徐々に収束させるステップ(S200)とを含む、プログラムを実行する。
(もっと読む)
車両の制御装置、制御方法、その方法を実現するプログラムおよびそのプログラムを記録した記録媒体
【課題】パーキングロック機構を備えた車両において、車両の停止状態を維持しつつパーキングロック機構によるパーキングロック頻度を向上させる。
【解決手段】ECUは、シフトポジションがPポジションに操作され(S102にてYES)、パーキングロック条件が成立すると(S104にてYES)、パーキングロック制御を実行するステップ(S106)と、パーキングロック制御前にファイナルギヤ機構が前進方向に回転していたか否かを判断するステップ(S108)と、前進方向に回転していたと判断されると(S108にてYES)、モータジェネレータを後進方向に回転させるステップ(S110)と、後進方向に回転していたと判断されると(S108にてNO)、モータジェネレータを前進方向に回転させるステップ(S112)とを含む、プログラムを実行する。
(もっと読む)
ブレーキ装置
【課題】 電動制動力発生手段の故障を速やかにかつ確実に判定する。
【解決手段】 運転者がアクセルペダルを踏んでブレーキペダル12を踏まない状態でスレーブシリンダ23がブレーキ液圧を発生していないときに、スレーブシリンダ23の電動モータ52を制動力発生方向と逆方向に回転させるように電流を供給し、電動モータ52の回転が検出されない場合に故障が発生したと判定するので、スレーブシリンダ23が非作動中であっても、わざわざスレーブシリンダ23を作動させることなく故障判定を行うことができる。またスレーブシリンダ23が実際に作動する前に故障判定を行えるので、故障が判定された場合にバックアップを速やかに行うことができ、しかも故障判定の実行中にスレーブシリンダ23が制動力を発生して故障判定が不能になる事態を未然に防止することができる。
(もっと読む)
車両およびその制御方法
【課題】運転者が車両の起動中にシフト操作を行った場合であっても、車両の起動後に再度のシフト操作をすることなく違和感なく発進できるようにすること。
【解決手段】ハイブリッド自動車20の起動中に運転者によりシフト操作が行われたときは、そのシフトポジションSPをCPU72に記憶する。そして、起動が完了したときに、走行するシフトポジションSPがRAM76に記憶されており、ブレーキポジションBPが0%でなく且つアクセル開度Accが0%であるとはいえないとき、RAM76に記憶されたシフトポジションSPとアクセル開度Accと車速Vとに基づいて設定された要求トルクTr*が出力されるようエンジンECU24やモータECU40に指令を出力すると共に、所定の初期値から時間と共に徐々に小さな値に設定される制動トルクが作用するようにブレーキ96a〜96dを制御するようブレーキECU94に指令を出力する。
(もっと読む)
車両の制御装置、制御方法、その方法を実現するプログラムおよびそのプログラムを記録した記録媒体
【課題】ブレーキペダルが操作されていなくてもブレーキ力が保持される場合がある車両において、クリープトルクを適切に抑制することにより無駄なエネルギ消費を削減する。
【解決手段】ECUは、クリープトルク反映率を設定するステップ(S108)と、ブレーキがオンされ(S110にてYES)、停車中であると(S112にてYES)、クリープトルク反映率を0に更新するステップ(S114)と、ブレーキがオフされていても(S110にてNO)、ブレーキ油圧が油圧値P(0)より大きいと(S118にてYES)、ブレーキホールド制御中であると判断して(S120)、ブレーキ油圧をパラメータとするマップに基づいて、クリープトルク反映率を低減して更新するステップ(S124)とを含む、プログラムを実行する。
(もっと読む)
ブレーキ装置
【課題】誤操作や誤動作による悪影響を低減できるブレーキ装置を提供すること。
【解決手段】ブレーキ装置10に緊急ブレーキスイッチ20を設け、緊急ブレーキスイッチ20を操作してから設定時間の経過後に、緊急ブレーキスイッチ20によるブレーキ力を低下させる。これにより、緊急制動時以外の制動時に緊急ブレーキスイッチ20を操作するような誤操作をした場合でも、設定時間の経過後にはブレーキ力は低下するので、車両1が不必要に減速し続けることを抑制することができる。また、車両1の制動時以外に緊急ブレーキスイッチ20を誤って操作し、制動時以外に車両1を制動する、つまり、ブレーキ装置10が誤動作により制動をする場合でも、設定時間の経過後にはブレーキ力は低下するので、車両1が不必要に減速し続けることを抑制することができる。これらの結果、誤操作や誤動作による悪影響を低減することができる。
(もっと読む)
車両およびその制御方法
【課題】駆動系の起動処理を実行するために運転者が煩雑な操作を行なわなければならなくなるのを抑制する。
【解決手段】パワースイッチからプッシュ信号が入力されてから所定時間tlat1が経過する前にシフトポジションが走行ポジションにシフト操作されたときには、シフト操作されないときの所定時間tlat1よりも長い所定時間tlat2が経過するまで起動指示フラグFに値1を設定し続ける即ち起動指示を行ない続ける。これにより、シフトポジションが走行ポジションにシフト操作された後に再び非走行ポジションにシフト操作されたときに起動処理実行条件が成立する可能性を高くすることができる。この結果、起動処理を実行するために運転者が煩雑な操作を行なわなければならなくなるのを抑制することができる。
(もっと読む)
車両用駆動力制御装置
【課題】車両前方の道路環境に対応して、車両に減速度を作用させる車両用駆動力制御装置であって、運転者の減速意図が検出された地点に近いところで減速制御が開始されることが可能な車両用駆動力制御装置を提供する。
【解決手段】車両前方の道路環境を検出する手段と、前記道路環境に対して予め設定された特定領域内に車両がいるか否かを判断する手段(S005)と、運転者による減速意図が検出されたときに前記道路環境に対して適切な車両走行状態となるための減速度を作用させる手段と、運転者が前記減速意図を示したときの車両位置が前記特定領域の外である場合に、前記特定領域を拡大する手段(S008)とを備えている。
(もっと読む)
制動力制御装置、制動力制御方法
【課題】ドラムイン型のパーキングブレーキ装置が制動状態の場合に車両が動いても、ブレーキシューの耐久性が確保される制動力制御装置、制動力制御方法を提供することを目的とする。
【解決手段】ブレーキペダル11の踏み込み操作に応じて制動力が増減するサービスブレーキ30の制動力制御装置10において、サービスブレーキ30の制動力を低減するアクチュエータ15と、パーキングブレーキ20が制動状態の場合、パーキングブレーキ11が制動状態でない場合に制動力が低下する速度よりも遅い制動力低下速度でアクチュエータ15を制御する制御手段21aと、を有することを特徴とする。
(もっと読む)
車両制御装置
【課題】回転半径短縮制御が作動した場合に車輪速センサの異常判定における誤判定を抑制する車両制御装置を提供することを課題とする。
【解決手段】車両の旋回性能を向上させるために左右輪の駆動力差により旋回制御を行う車両制御装置1において、旋回制御がされるときは車輪速センサ10,11,12,13の異常判定において異常と判定され難くする(例えば、旋回制御がされるときは左右輪の駆動力差が大きいほど車輪速センサの異常判定閾値を異常と判定され難くなる値に変更する、旋回制御がされるときは車輪速センサの異常判定を停止する)ことを特徴とする。
(もっと読む)
1 - 20 / 607
[ Back to top ]