
Fターム[3D046HH45]の内容
ブレーキシステム(制動力調整) (22,399) | 検出対象及び検出手段 (8,844) | 路面状態 (350)
Fターム[3D046HH45]の下位に属するFターム
Fターム[3D046HH45]に分類される特許
1 - 20 / 57
車両用走行支援装置及び車両用走行支援方法
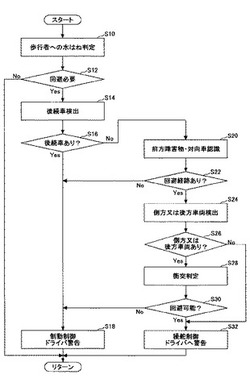
【課題】本発明は、自車両の周辺車両に応じた適切な走行支援を行うことができる、車両用走行支援装置及び車両用走行支援方法の提供を目的とする。
【解決手段】自車両の進行方向に水溜りが検出された場合において、自車両の後続車両が検出されるときには、後続車両を減速させるため、自車両を制動制御する。自車両の進行方向に水溜りが検出された場合において、自車両の後続車両が検出されないときには、前方の障害物や対向車を回避する経路があって、側方又は後方の周辺車両に衝突するおそれがない場合には、自車両を操舵制御し、回避経路がなく又は周辺車両に衝突するおそれがある場合には、自車両を制動制御する。
(もっと読む)
車両状態判定装置

【課題】タイヤがグリップ状態にあるときに、ロール角加速度に基づいて車両のロール状態を判定することにより、特別なセンサ等を設けることなく、適切にロール状態を判定する車両状態判定装置を提供することを目的とする。
【解決手段】本発明は、タイヤ91a、91bによる路面のグリップ状態を判定するグリップ判定手段10と、
車両100のロール角加速度を算出するロール角加速度算出手段20と、
操舵角を検出する操舵角検出手段30とを備え、
前記グリップ判定手段によりグリップ状態にあると判定されたときに、前記ロール角加速度算出手段により推定されたロール角加速度と、前記操舵角検出手段により検出された操舵角とに基づいて、ロール状態判定を行うことを特徴とする。
(もっと読む)
車両用駆動力制御装置
【課題】検出対象の位置検出精度の問題で良好な駆動力制御が妨げられることを抑制することが可能な車両用駆動力制御装置を提供する。
【解決手段】車両の先方の環境を検出し、前記環境に適した駆動力制御を行う車両用駆動力制御装置であって、道路上又は道路周辺の印の情報を予め記憶する記憶手段と、前記印を検出する手段と、前記検出された印に基づいて車両と前記環境との距離情報を求める手段(S40)と、前記距離情報に基づいて、駆動力制御を行う(S70)。
(もっと読む)
車両用駆動力制御装置
【課題】車両前方の道路環境に対応して、車両に減速度を作用させる車両用駆動力制御装置であって、運転者の減速意図が検出された地点に近いところで減速制御が開始されることが可能な車両用駆動力制御装置を提供する。
【解決手段】車両前方の道路環境を検出する手段と、前記道路環境に対して予め設定された特定領域内に車両がいるか否かを判断する手段(S005)と、運転者による減速意図が検出されたときに前記道路環境に対して適切な車両走行状態となるための減速度を作用させる手段と、運転者が前記減速意図を示したときの車両位置が前記特定領域の外である場合に、前記特定領域を拡大する手段(S008)とを備えている。
(もっと読む)
自動制動制御装置
【課題】自動制動により車両は減速するのか、または運転者の操作で車両を減速しなければならないかを容易に認識できる自動制動制御装置を提供する。
【解決手段】車両が進行すると推定される経路を進行推定経路24aとして表示する。この進行推定経路24aを車両が進行するものとして自動制動制御が実行される。進行推定経路24aは道路種別に基づいて推定される。たとえば、道路22cは細街路であるのに対し道路22bは国道であるので、進行推定経路24aは分岐点23aを通過した後、道路22bを通過する。進行推定経路24aは、車両の現在地から500m先まで推定されるので、進行推定経路24aは、500m先で途切れる。
(もっと読む)
車両用走行制御装置
【課題】トライバの好みに応じた横加速度に設定する。
【解決手段】前方道路のカーブ状態と横加速度設定値とに基づいて前方道路のカーブにおける目標車速を演算し、この目標車速に基づいて目標減速度を演算して車両の減速制御を行う車両用走行制御装置において、横加速度設定値を切り換える横加速度切り換え手段を設け、横加速度設定値を横加速度切り換え手段により切り換えられた値に変更する。
(もっと読む)
車両用運転支援装置
【課題】必要なときだけ確実に運転支援を行う。
【解決手段】車両の現在位置、車両前方のカーブ情報および現在の車両状態に基づいて車両前方カーブ通過時の車両状態を推定する(1a)とともに、記憶されている過去のカーブ通過時の車両状態に基づいて運転者のカーブ通過時の許容車両状態を推定し(1b)、車両前方カーブ通過時の推定車両状態と運転者のカーブ通過時の許容車両状態とに基づいてカーブにおける運転支援を行うか否かを判定する(1c、1d)。
(もっと読む)
ドライバー運転特性学習装置と車両の走行安全装置
【課題】カーブに対する減速特性と一時停止に対する減速特性とを区別して学習する。
【解決手段】自車両の車両状態を検出する車両状態検出部51と、車両状態検出部51の出力に基づき自車両が走行した道路を認識する道路認識部52と、車両状態検出部51の出力に基づき、道路認識部52により認識された道路に対するドライバーの減速特性を学習する減速特性学習部54と、を備えたドライバー運転特性学習装置50において、道路認識部52により認識された道路の属性が少なくとも屈曲部もしくは一時停止部であるか否か判定する道路属性判定部53を備え、減速特性学習部54は、道路属性判定部53により前記道路の属性が屈曲部もしくは一時停止部と判定された場合には該判定された道路の属性に対応してドライバーの減速特性を学習する。
(もっと読む)
車両の運転支援制御装置および方法
【課題】カメラ等を用いた前方認識装置2の出力情報に基く運転支援を、前方の道路形状により見通しが悪くても、安全に実行できる車両の運転支援装置を実現すること。
【解決手段】ナビゲーション装置1と、車両周辺の状況を撮影し特定の対象物までの距離と相対速度を算出できるカメラ等を用いた前方認識装置2と、車両走行状態を取得する車両に搭載されているセンサ群とを備え、前記ナビ装置1または前記カメラ等を用いた前方認識装置2から得られた走行環境情報によって、前記カメラ等を用いた前方認識装置の出力情報を基にした運転支援制御を継続するか中断するかを判定する。もし、それらセンサ群の情報により視認性が悪いと判断した場合は前記前方認識装置の出力情報を基にした運転支援制御を中断する。
(もっと読む)
車線逸脱防止装置
【課題】運転者の意思に適合させた車線逸脱防止制御を行う。
【解決手段】車線逸脱防止装置は、車両の旋回方向と、旋回路の旋回方向との一致及び不一致を判定するとともに(ステップS3)、旋回路の外側及び内側のうちのどれに対して車両が逸脱傾向を示しているのかを判定し(ステップS4)、それら判定結果に基づいて、車線逸脱防止制御の制御内容を変更する(ステップS5)。
(もっと読む)
ドライブシャフトの軸トルク・路面タイヤ間作用力測定装置
【課題】 ドライブシャフトに作用する軸トルクの正確な測定が可能で、ドライブシャフトの軽量化に貢献できると共に、路面−タイヤ間の作用力を推定できる軸トルク・路面タイヤ間作用力測定装置を提供する。
【解決手段】 この軸トルク・路面タイヤ間作用力測定装置は、軸トルク演算手段6、制動力演算手段9、および、路面とタイヤ間の作用力を推定する作用力演算手段10を備える。ドライブシャフトの両端の等速ジョイントの外輪に、それぞれ第1および第2のセンサーターゲット1,2を取付ける。これら各センサーターゲット1,2に対向して、回転パルス信号を出力する第1および第2のセンサ3,4を設ける。前記軸トルク演算手段6は、両センサ3,4により検出した回転パルス信号から、ドライブシャフト11に生じたねじれに対応する回転パルス信号の位相差を演算処理して軸トルクを求める。前記作用力演算手段10は、ブレーキの制動力、および軸トルク演算手段6で求めた軸トルクから、路面とタイヤ間の作用力を推定する。
(もっと読む)
車両の走行安全装置
【課題】安全装置の作動許容範囲を拡大する。
【解決手段】自車両の車両状態を検出する車両状態検出部13と、記憶部11の道路データに基づき自車両の進行方向に存在するカーブの形状を認識するカーブ認識部14と、認識したカーブの形状に基づき該カーブを適正に通過可能な適正車両状態を設定する適正車両状態設定部16と、自車両の車両状態と適正車両状態とを比較する比較部17と、自車両の旋回状態を検知する旋回状態検知手段と、自車両の車両状態が適正車両状態にないときに自車両に設けられた安全装置20の作動を許容し、自車両が旋回状態であることが検知された場合に安全装置20の作動を行わない作動部18と、を備える車両の走行安全装置10であって、自車両がカーブ進入初期状態であるか否かを判定するカーブ進入初期状態判定部15を備え、作動部18は自車両がカーブ進入初期状態である場合には安全装置20の作動を許容する。
(もっと読む)
車両走行制御システム
【課題】ナビゲーションシステムの持つ地図情報と地図情報以外から得られる情報(例えば、カメラなどの撮像装置による白線認識)の両者を有効に利用して安定性の高い速度制御を行う。
【解決手段】地図情報に応じて第1の目標速度を演算し、地図情報以外から得られる道路形状(例えば、カメラにより検出される白線認識結果)に応じて第2の目標速度を演算し、第1の目標速度と前記第2の目標速度を比較して、より低い目標速度を選択して自車の速度を制御する。
(もっと読む)
車両用走行装置
【課題】車両の最適な走行経路を設定すること。
【解決手段】車両用走行装置10は、車両に搭載され、車両が進行する路面状態を検出する路面状態検出手段1、2と、目標とする目標位置までの走行経路を設定する経路設定手段3と、車両の特性を記憶する車両特性記憶手段4と、を備えている。経路設定手段3は、路面状態検出手段1、2により検出された路面状態と、車両特性記憶手段4により記憶された車両の特性と、に基づいて、走行経路S1、S2を設定する。
(もっと読む)
サスペンション制御装置
【課題】アクチュエータのストロークを保持しながら輪荷重を増加させることで急制動時の制動性能向上を長時間にわたって確保できるサスペンション制御装置を提供する。
【解決手段】車両2の制動状態が急制動である場合、制動制御信号27と通常制御信号26とを加算して得た補正通常制御信号28を油圧シリンダ13に出力し推力を発生させる。制動制御信号27が含まれる補正通常制御信号28に基づく油圧シリンダ13の伸縮制御により、推力の発生時には輪荷重が増減される。油圧シリンダ13の伸び制御により輪荷重が増加され、制動性能が向上し制動距離が短縮される。油圧シリンダ13の縮み制御により、油圧シリンダ13の伸びきりが抑制され、その分、ストロークが確保され、ひいては長時間にわたり制動性能を向上できる。
(もっと読む)
路面状況検出装置
【課題】走行中に路面状況(路面の乾湿)を的確に検出することができる路面状況検出装置を提供する。
【解決手段】車速センサ15は、車速を検出し、制御部11は、車速センサ15によって検出された車速が所定速度を越えると制御部11は各部を動作させる。カメラ12は、湿潤路面において水しぶきが発生する車輪の後方を撮影して画像データを生成する。画像解析部13は、カメラ12によって生成された画像データを周波数解析し、水しぶきに特徴的な所定の周波数成分を積算して積算値を算出する。判定部14は、画像解析部13によって算出された積算値が所定値より大きいか否かを判定し、積算値が所定値より大きい場合に、湿潤路面であることを示す信号を出力する。
(もっと読む)
交差点交通管制システム
【課題】より一層円滑な交差点交通流を実現させる交差点交通管制システムを提供すること。
【解決手段】交差点に進入する車両に対して優先度を設定し、この設定された優先度に応じて交差点を通過するように交差点に進入する車両の速度を制御する交差点交通管制システムにおいて、当該交差点を含む所定領域内に障害物が存在するとき、A)当該交差点に進入する車両のうち上記障害物が存在する道路へ進行しようとしている車両の交差点通過優先度を下げることによって、又は、B)当該交差点に進入する車両による上記障害物が存在する道路への進行を禁止することによって、当該交差点に進入しようとする車両に対して上記障害物が存在する道路への進行を制限する。
(もっと読む)
路面状態推定装置及び方法
【課題】精度よく路面の状態を推定することができる路面状態推定装置及び方法を提供する。
【解決手段】路面状態推定装置は、路面に接触する回転体の各種物理量を計測する計測段11と、計測段11で計測したデータから回転体の回転に同期した信号を抽出する適応デジタルフィルタを有し、計測段11で計測したデータと適応デジタルフィルタで抽出した回転に同期した信号とから、抽出した残りの信号を求める抽出段21と、抽出段21で抽出した残りの信号により路面の状態を推定する推定段41とを具える。
(もっと読む)
車両制御装置、方法及びコンピュータ読み取り可能な記録媒体
【課題】車両制御にあたり利便性を向上させることが可能な車両制御装置、方法及びその方法をコンピュータに実行させるためのプログラムを記録したコンピュータ読み取り可能な記録媒体を提供する。
【解決手段】車両制御装置1は、自車両が走行車線を逸脱しようとしていると判断した場合、自車両の方向及び速度の少なくとも一方を制御して、自車両の走行車線外で自車両が走行可能な領域に自車両を停止させる。このため、例えば運転者自らが路肩に進入しようとしている場合などには、自車両が車線に戻るように制御されることなく、路肩等に停止させられることとなる。従って、車両制御にあたり利便性を向上させることができる。
(もっと読む)
車両の走行安全装置
【課題】道路データの修正に要する演算量が過剰に増大することを抑制しつつ、道路形状の認識精度を向上させる。
【解決手段】不作動判定部22は、道路形状推定部17により推定された推定カーブに対して安全装置21が作動せず、かつ推定カーブの進入前または走行中に運転者の減速操作により所定値以上の減速度が発生した場合、あるいは、道路形状推定部17により推定された推定カーブに対して安全装置21が作動せず、かつ自車両の車両状態が推定カーブを適正に通過可能な適正車両状態にないときに、作動部20が不作動であると判定する。データ修正部26は、不作動判定部22により不作動であると判定された推定カーブに対して、作動部20が作動しやすくなるように、この推定カーブに対応する認識カーブ形状の検出に用いられる記憶部11の道路データを変更、あるいは記憶部11に新規の道路データを追加する。
(もっと読む)
1 - 20 / 57
[ Back to top ]