
Fターム[3D046JJ02]の内容
ブレーキシステム(制動力調整) (22,399) | 制御方法 (1,512) | 基準値設定 (589) | 変更 (226)
Fターム[3D046JJ02]に分類される特許
1 - 20 / 226
車両の走行安全装置
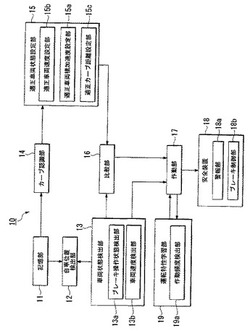
【課題】運転者の運転特性に応じて安全装置の作動し易さ、し難さを変更する。
【解決手段】道路データに基づき自車両の進行方向に存在するカーブ形状を認識するカーブ認識部14と、認識したカーブの形状に基づき該カーブを適正に通過可能な適正車両状態を設定する適正車両状態設定部15と、車両状態検出部13が検出した車両状態と適正車両状態設定部15が設定した適正車両状態とを比較する比較部16と、自車両の車両状態が適正車両状態にないときに自車両の安全装置18を作動させる作動部17と、カーブに対する作動部17の作動頻度を算出する作動頻度算出部19aと、作動部17の作動頻度に基づいて運転者の運転特性を学習する運転特性学習部19と、を備え、作動部17は学習した運転者の運転特性に基づいて安全装置18の作動内容を変更する。
(もっと読む)
車両の運動制御装置

【課題】車両の運動制御装置において、電動モータの回転数を低下させてもホイールシリンダに対する増圧応答性を適切に得る。
【解決手段】車両の運動制御装置は、モータ制御手段(306,314)が電動モータ33の回転数を低下させる場合、弁制御手段(ステップ312,314)が、マスタシリンダとホイールシリンダとの間に介在する液圧制御対象の増圧弁を駆動してホイールシリンダ側に流出される単位時間あたりのブレーキ液の流量を増大させる。
(もっと読む)
車両用トラクション制御装置
【課題】左右の駆動輪のスリップが交互に大きくなるスリップのハンチングを防止することが可能な車両用トラクション制御装置を提供する。
【解決手段】ディファレンシャル15を介して駆動力が伝達される左右の後輪12L、12Rを有する車両10に適用され、スキッドコントロールコンピュータ30が左右の後輪12L、12Rのうち加速スリップが大きい後輪に対して制動力を付加するトラクション制御装置において、スキッドコントロールコンピュータ30は、左右の後輪12L、12Rの両方がスリップしている場合、加速スリップが大きい後輪に対して付加する制動力を制限する。
(もっと読む)
ブレーキアシスト装置
【課題】ブレーキ操作時に制動力が増大するようにブレーキ操作をアシストする、ブレーキアシスト装置に関し、簡素且つ安価な構成で個々のドライバに応じた閾値を設定できるようにする。
【解決手段】ドライバのブレーキ操作状態に基づいて制動力を増大させるブレーキアシスト装置において、ブレーキアシスト装置を作動させるか否かの作動閾値を設定又は変更する閾値設定手段7を備え、閾値設定手段7は、ドライバの体重又は姿勢に基づいて作動閾値を設定又は変更するように構成する。
(もっと読む)
電動パーキングブレーキ制御装置、電動パーキングブレーキ装置、及び、電動パーキングブレーキ制御装置の制御方法
【課題】目標張力の低下を防止すると共に、ケーブルを巻き上げるアクチュエータの小型化等の省力化が可能な電動パーキングブレーキ制御装置等を提供すること。
【解決手段】車輪の駐車ブレーキユニット35R、35Lにそれぞれ接続されたケーブル34R、34Lを巻き上げる電動PKBアクチュエータ30と、車輪のサービスブレーキによる制動圧を制御するブレーキアクチュエータ10と、を制御する電動パーキングブレーキ制御装置9において、所定の目標張力になるまでケーブルを巻き上げた後、目標張力未満に張力が低下した場合、ブレーキアクチュエータ10を制御して制動圧を所定値まで増圧する増圧制御手段9aと、増圧制御手段により増圧した後、電動PKBアクチュエータ30を制御して目標張力よりも大きい張力になるまでケーブルを巻き上げる張力増大制御手段9bと、を有することを特徴とする。
(もっと読む)
ブレーキペダル反力発生装置
【課題】良好なブレーキフィーリングを安定して実現することのできるブレーキペダル反力発生装置を提供する。
【解決手段】ブレーキペダル反力発生装置において、可変絞り機構100は、マスタシリンダからの作動液の供給流量が所定の流量を超えたときに、ストロークシミュレータ69との間の流路面積を変化させる機能をもつ。可変絞り機構100は、作動液を通すための貫通路106が形成された可動子104を有し、当該貫通路106中に絞り部分が形成される。可動子104はケース体102の内部に摺動可能に設けられ、ケース体102に形成された連通口112の一部をふさぐことで、流路面積を変化させる。
(もっと読む)
車両用電動パーキングブレーキ装置及び車両用電動パーキングブレーキ装置の異常検出方法
【課題】ケーブル切れ異常を適切に検出する車両用電動パーキングブレーキ装置及びその異常検出方法を提供すること。
【解決手段】車両に搭載された、電動式のパーキングブレーキ装置が、自車両現在位置の坂路勾配に応じた目標制動力を算出する算出手段と、この目標制動力を生じさせるケーブル張力をパーキングブレーキケーブルに発生させる張力発生手段と、自車両が移動しているか否かを判定する判定手段と、パーキングブレーキケーブルの異常を検出するケーブル異常検出手段とを備える。張力発生手段は、目標制動力を生じさせる第一のケーブル張力を発生させたときに、自車両が移動している場合、上記第一のケーブル張力の2倍の張力である第二のケーブル張力を発生させる。ケーブル異常検出手段は、張力発生手段が上記第二のケーブル張力を発生させたときに、自車両が移動していない場合、パーキングブレーキケーブルに異常が発生していると判断する。
(もっと読む)
ブレーキ装置
【課題】液圧式ブレーキがフェードした場合であっても適切な制動力を得ることができ、乗用車等の小型車にも適用が容易なブレーキ装置を提供する。
【解決手段】ブレーキ装置を、ブレーキフルードの圧力に応じた制動力を発生する液圧式ブレーキ80と、電動アクチュエータ20によって駆動される電動式ブレーキ10と、液圧式ブレーキ80のフェード状態を検出するフェード状態検出手段40と、液圧式ブレーキ80のフェード状態が生じた場合に、フェード状態による液圧式ブレーキ80の制動力低下量に応じた制動力で電動式ブレーキを制動させる電動式ブレーキ制御手段40とを備える構成とする。
(もっと読む)
車両用安全装置
【課題】車両の進行方向、左右方向へのドライバーの身体のふらつきが抑制され、ドライバーのステアリング操作性が向上する。
【解決手段】衝突前車両制御手段104がシートベルト制御信号を、ブレーキ制御信号よりも早いタイミングで生成する車両用安全装置にあって、ブレーキ制御信号により、自車両が減速制御されている間に、ステアリング操作量が所定値以上となった場合、衝突前車両制御手段104は、ブレーキ制御信号の生成を解除するが、シートベルト制御信号の生成を解除しないようにした。
(もっと読む)
車両の障害物認識装置
【課題】自車両前方の障害物を検知する障害物検知手段(レーダ装置1)を備えた車両の障害物認識装置において、ヨーレートセンサ13の検出値と自車両Wの車速を検出する車速検出手段(車速センサ12)により検出された車速とに基づいて自車両Wの進行路を推定する場合に、自車両Wの走行状況に応じて、その推定を出来る限り正確に行えるようにする。
【解決手段】車速検出手段により検出された車速に応じて、ヨーレートセンサ13の検出値を補正する。具体的には、車速検出手段により検出された車速が所定車速以上であるときには、該所定車速よりも小さいときに比べて、ローパスフィルタのカットオフ周波数を低くする。
(もっと読む)
電動車両
【課題】電動車両の降坂走行時において、降坂走行に引き続く平坦路走行あるいは登坂走行で十分な動力性能が発揮できるように考慮した電動発電機の回生発電制御を行なう。
【解決手段】回生制御部110は、回生制動時のモータジェネレータのトルク指令値Tqcom(一般的には負値)を設定する。制動協調制御部150は、運転者のブレーキ踏力BKに基づき車両全体で必要とされるトータル制動力(パワー)を算出するとともに、このトータル制動力の出力についての油圧ブレーキ90およびモータジェネレータ間での分担を制御する。MG−ECU50は、トルク指令値Tqcomに従った回生トルクが発生されるようにモータジェネレータを駆動制御する。回生制御部110は、同一のブレーキ操作に対して、降坂路走行時には平坦路走行時よりも回生トルクの絶対値が小さくなるように制限する。
(もっと読む)
ブレーキ装置
【課題】誤操作や誤動作による悪影響を低減できるブレーキ装置を提供すること。
【解決手段】ブレーキ装置10に緊急ブレーキスイッチ20を設け、緊急ブレーキスイッチ20を操作してから設定時間の経過後に、緊急ブレーキスイッチ20によるブレーキ力を低下させる。これにより、緊急制動時以外の制動時に緊急ブレーキスイッチ20を操作するような誤操作をした場合でも、設定時間の経過後にはブレーキ力は低下するので、車両1が不必要に減速し続けることを抑制することができる。また、車両1の制動時以外に緊急ブレーキスイッチ20を誤って操作し、制動時以外に車両1を制動する、つまり、ブレーキ装置10が誤動作により制動をする場合でも、設定時間の経過後にはブレーキ力は低下するので、車両1が不必要に減速し続けることを抑制することができる。これらの結果、誤操作や誤動作による悪影響を低減することができる。
(もっと読む)
周辺監視装置および周辺監視方法
【課題】外部の状況を鑑みて不要な情報提供や動作制御を抑制・禁止する周辺監視装置および周辺監視方法を提供すること。
【解決手段】カメラ31が撮影し、前処理部11による処理が施された入力画像から歩行者認識部18が歩行者を認識するとともに、特定環境検知部19が信号前停止、横断歩道前停止、歩道状態、道路種別、走行車線など歩行者を認識してもその歩行者との衝突が発生する可能性が低く、情報提供や車両制御の必要性が小さい特定の状況を検知する。そして特定の状況を検知した場合には、運転者に対する報知や車両動作の制御を禁止・抑制する。
(もっと読む)
制動力制御装置、制動力制御方法
【課題】ドラムイン型のパーキングブレーキ装置が制動状態の場合に車両が動いても、ブレーキシューの耐久性が確保される制動力制御装置、制動力制御方法を提供することを目的とする。
【解決手段】ブレーキペダル11の踏み込み操作に応じて制動力が増減するサービスブレーキ30の制動力制御装置10において、サービスブレーキ30の制動力を低減するアクチュエータ15と、パーキングブレーキ20が制動状態の場合、パーキングブレーキ11が制動状態でない場合に制動力が低下する速度よりも遅い制動力低下速度でアクチュエータ15を制御する制御手段21aと、を有することを特徴とする。
(もっと読む)
車両制御装置
【課題】走行中におけるパーキングブレーキの制動時に車両の操縦安定性を確保できる車両制御装置を提供する。
【解決手段】車両制御装置を、車両の挙動に応じて車両の一部の車輪を制動してヨーモーメントを発生させるヨーモーメント制御手段100と、ヨーモーメント制御手段100の作動スタンバイ状態と非作動状態とを選択する選択手段170と、走行中におけるパーキングブレーキ装置10の制動を検出する動的制動検出手段110とを備え、ヨーモーメント制御手段100は、非作動状態での走行中におけるパーキングブレーキ装置10の制動の検出に応じて、非作動状態から作動スタンバイ状態へ変更する構成とする。
(もっと読む)
車両の制御装置、制御方法およびその制御方法をコンピュータで実現されるプログラムならびにそのプログラムを記録した記録媒体
【課題】コストの上昇を抑制しつつ、車両の状態に応じて制動時に回生制動により発生する騒音を抑制する。
【解決手段】HV_ECUは、EVスイッチがオンであるか(S100にてYES)、または、EVスイッチがオフであっても(S100にてNO)、位置情報および時刻情報が予め定められた条件を満足すると(S102にてYESかつS104にてYES)、SOCが予め定められた値Aよりも大きいと(S106にてYES)、回生制動カット指令を実行するステップ(S108)と、EVスイッチがオフであって(S100にてNO)、位置情報および時刻情報のうちのいずれかが予め定められた条件を満足しないと(S102にてNOまたはS104にてNO)、回生制動カット解除を実行するステップ(S110)とを含む、プログラムを実行する。
(もっと読む)
自動車用回生制動故障時の回生制動量補正方法
【課題】 故障時の制動量を反映して回生制動量を車両状態によって増減することができ、バッテリー充電戦略に有利であり、燃費向上を可能とする自動車用回生制動故障時の回生制動量補正方法を提供する。
【解決手段】
本発明は、自動車用回生制動故障時の回生制動量補正方法において、回生制動の進入可否を判断する段階と、前記段階で回生制動が進入状態であると判断された場合、走行制御器(以下、HCU)と電子式ブレーキシステム(以下、EBS)が回生制動制御量を記憶する段階と、HCU及びEBSが回生制動関連の故障時に故障診断用制動量を計算する段階と、HCU及びEBSが回生制動関連の故障直前に計算された正常的な回生制御量と故障診断用制動量の差を学習して記憶する段階と、故障診断用制動量に制動学習値(正常と故障の差の値)を補正して回生制御する段階と、HCU及びEBSが各々別々に回生制動制御する段階と、を含むことを特徴とする。
(もっと読む)
車両の走行制御装置
【課題】簡単な制御で実現でき、また、停止間際での不要な減速度変化を抑制し、ドライバに対して不自然な感覚を与えることなく安定した停止を行う。
【解決手段】走行制御ユニット5は、先行車が略停止状態と推定される場合には、先行車の直後の第1の領域と、この第1の領域の後方に第2の領域とを設定する。そして、自車両1が第2の領域の更に後方の領域を走行している場合には、先行車後方のDstopの位置で停止する減速度G3を演算出力し、自車両1が第2の領域を走行している場合には、車両がクリープ現象で走行するクリープ車速V2よりも低車速の場合に限り、一定の減速度KG2を出力し、自車両1が第1の領域を走行している場合には、車両がクリープ現象で走行するクリープ車速V1よりも低車速の場合に限り、上述の一定の減速度KG2よりも大きな一定の減速度KG1を出力する。
(もっと読む)
運転支援装置
【課題】過去の運転者の車両操作と対応付けて記憶された車両状況から今後の運転者が行う車両操作を予測することにより、現在の状況に応じた適切な走行を行わせることを可能とした運転支援装置を提供する。
【解決手段】自車両の前方を走行する前方車両が検出された場合に、学習システムを起動させて自車状況と自車両の周囲状況を前方レーダ装置3や各種センサ等によって検出し(S5、S6)、運転者の車両操作と対応付けて累積的に学習情報DB8に記憶させる(S8)とともに、一方で、その学習結果と現在の車両状況とから運転者が今後に車線変更の運転操作を行うか否かを予測し(S14)、車線変更の運転操作を行うと予測された場合にはレーンキープアシスト制御やクルーズコントロール制御等の車線変更を妨げる制御を抑制する(S16)ように構成する。
(もっと読む)
車両挙動制御装置
【課題】ヨーレートセンサのゼロ点補正の誤差に起因した不適切な挙動制御を防止する車両挙動制御装置を提供する。
【解決手段】本発明の車両挙動制御装置Cでは、挙動制御の開始しきい値Thを設定するにあたって、停止中ゼロ点補正出力YR0Sと走行中ゼロ点補正出力YR0Mとの差が第1の所定値Aを超え、且つ、所定時間Tht内における停止中ゼロ点補正出力YR0Sの演算回数と走行中ゼロ点補正出力YR0Mの演算回数との差が第2の所定値Thctを超える場合に、挙動制御の開始しきい値Thを高く設定する。
(もっと読む)
1 - 20 / 226
[ Back to top ]