
Fターム[3D052AA02]の内容
非転向輪、付随車の操向、その他の操向 (4,525) | 目的、効果 (593) | 旋回性の改善 (154)
Fターム[3D052AA02]の下位に属するFターム
旋回半径を変えるもの (64)
Fターム[3D052AA02]に分類される特許
1 - 20 / 90
作業車両
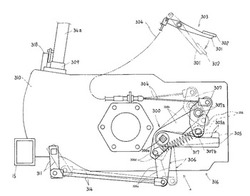
【課題】旋回に連動して切状態となる旋回内側のサイドクラッチの切状態の解除操作機構をコンパクトに構成し、広い取付スペースを必要としない作業車両を提供する。
【解決手段】走行車体に走行装置を設け、走行装置への駆動力を入切する切替伝動装置300を入切操作する操作部材305を設け、走行車体を操向操作する操舵部材を旋回操作すると切替伝動装置300を操作部材305を介して切操作する旋回連動機構Aを設けた作業車両において、旋回連動機構Aと操作部材305の間に旋回連動状態を解除する解除操作部材307を設けると共に、この解除操作部材307を旋回連動状態と連動解除状態に切り替える解除切替部材303を設けて構成する。
(もっと読む)
クローラ式車両

【課題】路面状況等に拘らず、作業者が意図する方向に向けて走行させることが可能な高所作業車を提供する。
【解決手段】高所作業車は、クローラ装置の走行作動を操作するための操作レバー51と、操作レバーの傾倒方向および傾倒量を検出するX軸検出器およびY軸検出器と、クローラ装置の走行作動を制御するコントロールユニットとを備え、操作レバーの中立位置から前方への傾倒操作領域が、低速前進領域F1および高速前進領域F2からなり、コントロールユニットは、操作レバーが高速前進領域F2にある状態から右方に傾倒操作されたときには、左クローラ装置を操作レバーの前後への傾倒量に対応した回転速度で正転させ、右クローラ装置を、左クローラ装置の回転速度よりも所定出力だけ低く設定された回転速度を操作レバーの右方への傾倒量に対応させて低下させて設定された低下回転速度で、左クローラ装置と同一方向に回転させる。
(もっと読む)
作業車
【課題】走行状態指令手段の指令情報に基づいて、定格領域を越えるような出力制限領域にて制御指令用速度及び制御指令用駆動トルクが指令された場合であっても、操作者が意図した旋回走行が行うことが可能となる作業車を提供する。
【解決手段】左右の走行装置を夫々独立に走行駆動する一対の電動モータ11R,11Lの作動を制御する制御手段23が、各電動モータ11R,11Lについて求めた目標速度と各電動モータ11R,11Lの回転速度とに基づいて求めた制御指令用速度及び制御指令用駆動トルクが出力制限領域にあるときは、走行状態指令手段にて指令されている車体の旋回状態に対応する速度差を維持し、且つ、定格領域に戻るように、制御指令用速度及び制御指令用駆動トルクを補正する。
(もっと読む)
作業車両
【課題】作業者に負担を掛けないで、ブレーキペダルの連結と非連結を容易に切り替え可能であり、作業条件に合わせた操作が行える作業車両の提供である。
【解決手段】エンジンと前輪と後輪と苗植付部と左右のサイドクラッチと左右のサイドブレーキと左右のサイドクラッチ及び左右のサイドブレーキを操作可能な左右のブレーキペダル130と副変速レバーと副変速レバーセンサとを設けた走行車両に、左右のブレーキペダル130を連結又は非連結に切り替える切替装置140と、副変速レバーが高速時に切替装置140を作動して左右のブレーキペダル130を連結させる制御装置とを設ける。高速の直進走行時には、左右のブレーキペダル130が連結するため、停止操作が容易に行える。一方、低速時には、左右のブレーキペダル130が連結しないため、作業条件に合わせた操作が行える。
(もっと読む)
作業車両
【課題】単一のブレーキぺダルを備えた作業車両において、路上走行を安全にしながら、圃場作業時にはエンジンの回転数、ステアリングハンドルの操作位置状態から自動的に旋回走行する装置を提供する。
【解決手段】アクセルレバーにより回転数を調節できるエンジンと、該エンジンの回転数を検出するエンジン回転数センサと、ステアリングハンドルの操作状態を検出するハンドル切れ角センサとを設け、前記エンジン回転数センサが所定の作業回転数を検出し、前記ハンドル切れ角センサが最大切れ角に対して所定比率以上のハンドル切れ角を検出すると、前記ステアリングハンドルの切り側の左右ブレーキアクチュエータ24L、24Rを作動し左右ブレーキ作動手段の左右ブレーキ作動部の一方をだけを作動し片ブレーキ作動状態で旋回走行させるコントローラを設けたことを特徴とする作業車両の構成とする。
(もっと読む)
走行車両
【課題】 本発明の課題は、8条植えなどの多条植え用であっても適切な位置で苗の植え付けができる旋回連動制御装置を備えた乗用型作業機などの走行車両を提供することである。
【解決手段】 走行車両において、ステアリング機構に連動して旋回内側の走行推進体の駆動力を断つか制動する旋回連動機構と、走行推進体の伝動軸回転数検出手段と、走行車体の旋回時に、伝動軸回転数検出手段の検出による左右の走行推進体の回転数に基づき、旋回内側の走行推進体の回転数が旋回外側の走行推進体の回転数よりも小さい該旋回外側の走行推進体の回転数の所定値以下になれば、旋回内側の走行推進体を駆動することにより、旋回内側の走行推進体を駆動する状態と旋回内側の走行推進体の駆動力を旋回連動機構により断つか制動する状態を繰り返す断続的制御を実行する制御装置を備えた。
(もっと読む)
作業車
【課題】左右の走行車輪を一対の電動モータにて夫々独立に走行駆動し且つ夫々独立で左右の走行車輪に対する変速操作を行うようにしながらも、走行安定性を向上することが可能な作業車を提供する。
【解決手段】直進並びに旋回走行を現出可能な状態で左右の走行車輪2,2を夫々独立に走行駆動する一対の電動モータ11R,11Lと、夫々独立で左右の走行車輪2,2に対する変速操作を行う左右一対の変速操作具12R,12Lと、作動を制御する制御手段23とが備えられ、制御手段23が、変速操作具12R,12Lの操作位置が左右で異なるときは、各電動モータ11R,11Lの夫々に対する目標速度を、それらの速度差が各変速操作具12R,12Lの操作位置の差に対応する速度差よりも設定量だけ小さくなる状態で設定して各電動モータ11R,11Lの作動を制御する。
(もっと読む)
作業車両の制御装置および制御プログラム
【課題】操作ストロークを増減させて微調整を行う場合にもオペレータの感覚通りの制御量(速度比)が得られるようにする。
【解決手段】第1のラインL11上の点から操作ストロークが増加して速度比が減少する方向に操作レバー装置が操作された場合には、第1のラインL11に従って速度比を演算する。第2のラインL12上の点から操作ストロークが減少して速度比が増加する方向に操作レバー装置が操作された場合には、第2のラインL12に従って速度比を演算する。第1のラインL11上の点から操作ストロークが減少して速度比が増加する方向に操作レバー装置21が操作された場合あるいは第2のラインL12上の点から操作ストロークが増加して速度比が減少する方向に操作レバー装置が操作された場合には、第3のラインL131、L132、L133、L134に従って速度比を演算する。
(もっと読む)
乗用車両
【課題】車両の走行中に操舵した際の車両姿勢をより安定化することができる乗用車両を提供する。
【解決手段】フレーム部材11に対して回動自在に連結され左右方向に並設された対の支持部材31と、該両支持部材31に配設された対の後輪33とを備え、電気的駆動手段により走行駆動される乗用車両において、フレーム部材11に対する両支持部材31の回動角度をそれぞれ変化させて両後輪33の進行方向における位置を変化させる対の車輪位置駆動手段30とを備え、ハンドル12の操舵時に両車輪位置駆動手段30の片側のみを駆動して、両後輪33の進行方向における位置を互いに異なるように変化させる。
(もっと読む)
乗用車両
【課題】狭い場所で車両を回転させることができる乗用車両を提供する。
【解決手段】左右方向に並設されてフレーム部材11に配設された対の後輪33と、該後輪33に対し前側に配置されてフレーム部材11に設けられた前輪25とを備え、電気的駆動手段により走行駆動される乗用車両において、前輪25を路面から持ち上げる従動輪持ち上げ手段40を備え、両後輪33の回転速度を個別に変化させる。
(もっと読む)
車両の走行制御システム
【課題】走行車両を軌道に沿って走行させる走行制御システムを提供する。
【解決手段】走行車両200は、走行方向と直交する方向の両側において同軸上に配置された左右一対の車輪210、210を有し、これら車輪210、210にトルク指令を与えることで走行する。摩擦路面には、軌道Lから離れるに従って摩擦が小さくなるように摩擦係数の分布が設定されている。走行車両200は、左右の車輪210、210に対し同じトルク指令値を与えながら走行する。
(もっと読む)
作業機
【課題】 本発明は、機体の小回り旋回性を維持しながら、各種の状況に応じて適切に圃場が荒れるのを抑えることを課題とする。
【解決手段】 操向手段の操作を検出する旋回角度センサ(193)と、ステアリング機構により前輪が直進状態から操舵状態へ操向されるのに連動して操向内側のサイドクラッチを断続的に入/切し、前輪が操舵状態から直進状態へ戻るのに連動して操向内側のサイドクラッチを常時入状態にする旋回連動機構と、耕盤の深さを検出する耕盤深さセンサ(48)を設け、耕盤が深いことを耕盤深さセンサ(48)により検出すると、旋回連動機構により断続的に入/切する周期における入状態の割合を大きく変更する制御装置(163)を備えた作業機とした。
(もっと読む)
作業車両
【課題】左右一対のクローラ式走行装置に動力を変速伝動する一対の変速装置を作動させる各作動アームの相対的な操作位置調整を容易に行えるようにする。
【解決手段】左右一対の変速装置の作動アーム32A,32Bと走行操作具とを機械的に連結するリンク機構36A,36Bを一対の変速装置毎に各別に設け、各リンク機構36A,36Bが一対の連結ロッド44A,44B,46A,46B及び該一対の連結ロッド44A,44B,46A,46Bを連結する連結リンク47A,47Bを備え、一対の連結ロッド44A,44B,46A,46Bを作動アーム32A,32B側と走行操作具23側とにそれぞれ連結するとともに、該一対の連結ロッド44A,44B,46A,46Bの少なくとも一方を長さ調整可能に構成した作業車両において、前記2つの連結リンク47A,47Bを共通の支点軸49によって支持する。
(もっと読む)
乗用型対地作業車両
【課題】乗用型対地作業車両において、車両が傾斜面上を走行する場合でも、運転者が意図する方向への走行を可能とし、さらに、ヨーレートの検出値と目標値との偏差に基づく制御作用時の車両の挙動特性を自由に設定しやすくすることである。
【解決手段】乗用型対地作業車両である芝刈車両10は、コントローラ48と、車両のヨーレートを検出するヨーレートセンサ60とを備える。コントローラ48は、運転者により入力される加速指示及び旋回指示に基づいて左右車輪用電動モータ22,24それぞれの2の目標回転速度指令値を算出し、目標ヨーレートとヨーレート検出値との偏差に基づいて、車輪用電動モータ22,24にそれぞれ関係する2の補正係数を取得し、2の目標回転速度指令値のそれぞれを2の補正係数により補正して、車輪用電動モータ22,24の駆動を制御する。
(もっと読む)
走行伝動装置の制御装置
【課題】旋回中に左右の走行装置の速度差を変更した際の違和感を低減するための走行伝動装置の制御装置を提供する。
【解決手段】制御部は、人為的に操作される操向操作部材が第1操作位置から第2操作位置に切換操作される際に、切換操作の操作量に応じてクラッチによる動力の伝達量を漸増させてクラッチを入り状態とする。また、制御部は、操向操作部材が第2操作位置から第3操作位置に操作される際には、操作量の増加に伴いクラッチによる動力の伝達量を漸減させクラッチを切り状態とするとともに、制動手段による制動力を漸増させる。ただし、制御部は、操向操作部材の切換操作の操作速度が所定速度以上であった場合には、クラッチが伝動状態となるまで動力の伝達量を漸増させた後、動力の伝達量を漸減させるとともに制動手段による制動力を漸増させる。
(もっと読む)
作業車両
【課題】本発明の課題は、旋回外側の後輪がスリップするようなときのみ旋回内側の後輪を駆動して走行不能に陥らないようにし、悪条件化でも旋回がスムースに行えるようにする。
【解決手段】制御部(163)に左右の後輪の回転数を検出する後輪回転センサ(205)を設け、断続的入り切り制御機能(B1)は、後輪回転センサにより検出された旋回外側の後輪の回転数に基づいて旋回内側の後輪の設定回転数を所定の演算式にて演算して設定するが、演算式は設定回転数を前記旋回外側の後輪の回転数よりも小さい値に設定する。設定回転数よりも検出される旋回内側の後輪の回転数が大きいときは旋回内側のサドクラッチを切りにし、設定回転数よりも検出される旋回内側の後輪の回転数が小さいときは旋回内側のサイドクラッチを入にする構成とする。
(もっと読む)
駐車支援装置および駐車支援方法
【課題】少なくとも2つの操舵可能輪と相互に独立に駆動される少なくとも2つの駆動輪とを有する車両において、狭い駐車スペースへも僅かな操車の手間で駐車を行えるようにする。
【解決手段】縦列駐車の駐車スペース3への入庫過程を容易にするために、車両1は相互に独立に駆動される少なくとも2つの駆動輪11を有する。駆動機構として例えばハブモータ13が用いられる。駆動輪11は、ここでは、対向する2つの車輪すなわち1個の軸の両側の車輪であって、カーブ走行の際に一方が内円を走行し他方が外円を走行する。車両1のカーブ走行および操車走行を容易にするために、車両1はさらに少なくとも2つの操舵可能輪を有している。この実施例では、操舵可能輪は操舵可能軸15に取り付けられた車輪である。操舵可能軸15により操舵可能輪17の方向を相応に変更することにより、車輪を運動させ、操舵過程ないし車両の旋回走行が開始される。
(もっと読む)
乗用溝切り機
【課題】駆動装置による圃場での安定走行を実現すると共に、圃場だけでなく舗装路のような道路でも乗用が可能となる画期的な乗用溝切り機を提供すること。
【解決手段】操舵する前輪1と、駆動輪となる後輪2とを乗用部3に設け、少なくとも後輪2を右後輪2Rと左後輪2Lとを有する複数輪に構成すると共に、この右後輪2Rと左後輪2Lとを、駆動装置8により回転駆動される回転駆動軸と連結して駆動するように構成し、この回転駆動軸と前記右後輪2R若しくは左後輪2Lとを連結する連結部10に、この回転駆動軸の回転を伝達する駆動連結状態と回転が伝達されないで回転自在となるフリー連結状態とに切り替える駆動・フリー切り替え機構11を設ける。
(もっと読む)
車両
【課題】簡易な操作により、超信地旋回を行うことが可能な車両を提供する。
【解決手段】2つの前輪(左前輪21及び右前輪31)と、前記前輪にそれぞれ連結され、前記前輪を操舵する操舵用アクチュエータ(左前輪操舵モータ23及び右前輪操舵モータ33)と、前記操舵用アクチュエータの動作を指示するステアリングホイール62と、ステアリングホイール62の回動角θに基づいて定められる旋回中心Z周りを旋回することが可能な前記前輪の操舵角(δFL及びδFR)をそれぞれ算出し、前記前輪の操舵角が算出された操舵角となるように前記操舵用アクチュエータを動作させるコントローラ100と、を具備した。
(もっと読む)
作業車両
【課題】旋回内側後輪のスリップが発生する圃場状況にあっても、円滑な旋回走行を確保するとともに、作業部の下降および再稼動の位置ずれを抑えて作業精度を確保することができる作業車両を提供する。
【解決手段】作業車両は、前輪10の操舵開始により、旋回内側後輪の回転距離のカウント開始、作業部4の停止、旋回内側後輪11のサイドクラッチ切、同後輪11の回転距離nに基づく設定値N2対応の作業部4の再稼動までの一連の旋回連動制御をする制御装置163を備えて構成され、この旋回連動制御は、内側サイドクラッチの断続動作によって旋回内側の後輪11に外側と同速の走行動力を間欠的に伝動する内側間欠伝動制御に切替え可能に構成し、この内側間欠伝動制御への切替えと対応して設定値N2を小さくする補正を行うようにしたものである。
(もっと読む)
1 - 20 / 90
[ Back to top ]