
Fターム[3D232CC16]の内容
走行状態に応じる操向制御 (73,124) | 制御目的 (7,801) | 操舵性・安定性の向上 (4,043) | ステア特性の改善 (350)
Fターム[3D232CC16]の下位に属するFターム
アンダーステア傾向の防止 (129)
オーバーステア傾向の防止 (139)
Fターム[3D232CC16]に分類される特許
1 - 20 / 82
インホイールシステムを用いた車両制御方法
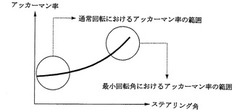
【課題】 車両の旋回安定性を確保しながらも、回転半径を最小化させることのできるインホイールシステムを用いた車両制御方法を提供する。
【解決手段】車両の各ホイールの内部にモータを装着して制御するインホイールシステムを用いた車両制御方法において、車両走行情報を基に車両の旋回モードを判断するステップと、旋回モードに対する車両の現在のアッカーマン率を計算するステップと、現在のアッカーマン率を基に制御命令を生成するステップと、制御命令を用いて各ホイールのモータをそれぞれ制御するステップと、を含むことを特徴とする。
(もっと読む)
インホイールモータを利用した車両制御方法

【課題】車体の安定性を確保するために、ESCシステムではなくインホイールシステムを利用することにより、車両を安定的に制御することができるインホイールモータを利用した車両制御方法を提供する。
【解決手段】操向角、ホイール速度、横加速度、ヨーレートを演算する段階、横加速度と予め設定された横加速度限界値を比較する段階、操向角、ホイール速度に基づいた運転手が要求する要求ヨーレートと車両の実測ヨーレートの差を予め設定されたヨーレートコントロール基準値と比較する段階、要求ヨーレートと実測ヨーレートの差がヨーレートコントロール基準値よりも大きい場合には、要求ヨーレートと実測ヨーレートを比較する段階、要求ヨーレートと実測ヨーレートの差によって最終トルク値を発生させる段階を含むことを特徴とする。
(もっと読む)
車両用操舵装置およびその制御方法
【課題】ステアバイワイヤシステムを有する車両用操舵装置において、旋回制動時等の走行安定性を向上させること。
【解決手段】ステアバイワイヤシステムと、ステアリングラック部材14と車輪とを連結する転舵用リンク部材と、転舵用リンク部材と並行して設置し、車体と車輪とを車両上下方向に揺動可能に連結する懸架用リンク部材と、ステアリングラック部材14を車両前後方向に移動させるラック移動手段27a、27b、27cと、ラック移動手段27a、27b、27cによるステアリングラックの移動に応じて、入力側ステアリング軸と出力側ステアリング軸との連結状態を切り替えるクラッチ27dと、を有し、ラック移動手段27a、27b、27cが、ステアリングラック部材14を、転舵用リンク部材との連結点が懸架用リンク部材に近づく方向に移動させる車両用操舵装置とした。
(もっと読む)
車両のパワーステアリング制御装置
【課題】ドライバが、広い運転領域で操舵輪のグリップ状況を舵力インフォメーションとして舵力で感じとりながら安心して適切な運転を行う。
【解決手段】操舵制御部は、ハンドル角と車速に応じて車両の運動モデルに基づき目標横加速度Gytを算出し、実際の横加速度と目標横加速度Gytとの偏差(横加速度偏差)ΔGyを算出し、操舵速度の絶対値と車速とに応じて現在の操舵状態がドライバが舵力をフィードバックして操舵している状態か否か判定し、ドライバが舵力をフィードバックして操舵している状態と判定し、且つ、横加速度偏差ΔGyが予め設定しておいた設定値CG以上の場合は、車速と操舵トルクを基に設定する基本アシストトルクTbを増加する方向に補正して、この補正した基本アシストトルクTbをアシストトルクTaとしてモータ駆動部に出力する。
(もっと読む)
車両運動制御装置
【課題】より最適な制御対象を選択して車両運動制御を実行することができるようにした車両運動制御装置を提供する。
【解決手段】異なる複数の制御対象を制御してアプリ要求値を実現する車両横方向運動制御を行う場合に、アプリ要求や車両状態およびアベイラビリティ演算部5で演算された各制御対象のアベイラビリティを優先順位決定条件として用い、この優先順位決定条件に基づいて、制御対象の選択タイミングを判定する。すなわち、アプリ要求が出されて最初に制御対象が選択されたのち、制御対象を選択するときの優先順位を決定する条件であるアプリ要求や車両情報もしくは各制御対象のアベイラビリティが変化したときに、それに基づいて選択制御対象を再考させる。これにより、より最適な制御対象を選択して車両横方向運動制御を円滑に行うことが可能となる。
(もっと読む)
操舵力制御装置
【課題】車両姿勢が不安定になる状況下での車両の加速時あるいは発進時において、簡素な構成で適切な操舵補助力を付加でき、ハンドル取られなどの発生しない車両の安定性向上を図れる操舵力制御装置を提供する。
【解決手段】μスプリット路面上での車両発進時あるいは車両加速時において、左前輪または右前輪が空転したときの車両姿勢が不安定になる状況に対し、車両発進時あるいは車両加速時の車輪速センサにより検出した左前輪の車輪速と、車輪速センサにより検出した右前輪の車輪速と、左前輪と右前輪との車輪速差の変化率とをもとに、適切な操舵補助力を付加し、簡素な構成でコストの増加を招くことなく、μスプリット路面上での車両の発進時あるいは加速時におけるハンドル取られなどを回避して車両の安定性向上を図る。
(もっと読む)
車両の走行制御装置
【課題】車両の目標軌跡や実軌跡を求めるための車外情報の取得を要することなく、車両の軌跡が運転者の希望に則し且つ運転者の操舵操作の速さを考慮した目標軌跡に沿って車両が走行するよう車両の走行を制御する。
【解決手段】舵角可変装置又はバイワイヤ式の操舵装置を備えた車両の走行制御装置。車両の軌跡の制御を開始又は更新すべきと判定したときには(S200、300)、その時点に於ける運転者の操舵操作量及び車速に基づいて車両が目標進行方向にて目標到達位置に到達するに必要な目標軌跡に沿って車両を走行させるための操舵輪の目標舵角を演算する。また車両の軌跡の制御を開始又は更新すべきと判定する際の運転者の操舵操作量の変化の流体圧の大きさに応じて目標舵角を補正する(S400)。そして目標舵角に基づいて操舵輪の舵角を制御する(S600)。
(もっと読む)
車両の運動制御装置
【課題】制御可能範囲が拡大され、よりアクティブな制御介入が実現できる車両の制御装置を提供することを目的とする。
【解決手段】操作状態量及び運動状態量に対応した車両の規範姿勢状態量を、所定の外力が作用する状態における車両の運動モデルにもとづき演算する規範姿勢状態量演算手段54と、路面摩擦係数推定値を含む前記車両の実姿勢状態量を推定する実姿勢状態推定部52と、実姿勢状態量(慣性力)および前後力に基づき路面摩擦係数相当値を決定する路面摩擦係数相当値決定部200と、実姿勢状態推定部が推定した前記路面摩擦係数推定値と前記路面摩擦係数相当値決定部200が決定した路面摩擦係数相当値に基づき、実路面摩擦係数を推定する実路面摩擦係数推定部400とを備えることを特徴とする車両の運動制御装置
(もっと読む)
ステアバイワイヤ式操舵装置
【課題】旋回時に内外輪に作用するコーナリング力が略均等になるようにトー角を調整できるステアバイワイヤ式転舵装置を提供する。
【解決手段】転舵用モータ6の回転を転舵軸10に伝える転舵動力伝達機構18と、トー角調整用モータ7の回転でトー角を調整するトー角調整動力伝達機構30とを備える。モータ6,7の失陥時に、各モータ6,7の動力伝達経路を切り換えて転舵可能にする切換機構17と、各モータ6,7に転舵角およびトー角の指令信号をそれぞれ与えるステアリング制御手段とを設ける。ステアリング制御手段は、車速とヨーレイトに応じてトー角調整を連続的に行わせるトー角調整制御部を有する。
(もっと読む)
アンダーステア検出装置及び検出方法
【課題】横Gセンサを用いず、低コストでアンダーステアの検出精度が向上できると共に、アンダーステアの誤検出を確実に防止できるアンダーステア検出装置及び検出方法を提供する。
【解決手段】ヨーレートと規範ヨーレートの値に応じてアンダーステア検出の禁止及びアンダーステア検出禁止の解除を実行するアンダーステア検出禁止判定手段15を備え、アンダーステア検出禁止判定手段は、以下の条件1、条件2のいずれかが成立時にアンダーステア検出の禁止を行い、
条件1:ヨーレートの絶対値が規範ヨーレートの絶対値よりも大きく、かつヨーレートと規範ヨーレートが同符号の場合
条件2:ヨーレートと規範ヨーレートが異符号の場合
ヨーレートの絶対値と規範ヨーレートの絶対値との差分値が予め定めた閾値以下の状態で所定時間継続した場合にアンダーステア検出の禁止解除を行う。
(もっと読む)
車両用操舵制御装置
【課題】トルクステアの影響を軽減し、ドライバの操舵負荷軽減と、安定した操舵状態の実現を可能とする車両用操舵制御装置を得ることを目的とする。
【解決手段】この発明による車両用操舵制御装置は、車輪速信号に基づいて演算したステアリング軸の回転に関連する第一のステアリング軸回転関連値と、ハンドル角信号に基づく第二のステアリング軸回転関連値とを比較し、前記比較の結果に基づいて前記車両に於けるトルクステアの発生の有無を検出するトルクステア検出手段を備え、前記トルクステア検出手段が前記トルクステアの発生を検出したとき、前記トルクステアを抑制するように前記アシストトルクを補正するようにしたことを特徴とする。
(もっと読む)
車両運動制御システム
【課題】ドライバーの違和感を低減して車両の適正な挙動を確保できる車両運動制御システムを提供すること。
【解決手段】この車両運動制御システム1では、車両10の操舵角に基づき推定された将来の横加速度と、将来の道路情報に基づき推定された将来の横加速度とのうち低い方の横加速度が選択される。また、この選択にて車両10の操舵角に基づき推定された将来の横加速度が選択された場合には、現在の車両状態に基づき推定された車両の将来の座標と将来の道路情報とが用いられて車両10が所定のコースから逸脱するか否かが判定される。そして、この判定にて肯定判定が行われた場合には、将来の道路情報に基づき推定された将来の横加速度が用いられて、目標ヨーレートが算出される。
(もっと読む)
車両の運動制御装置
【課題】操舵角制御と制動力制御とを組み合わせて旋回操作時における車両の運動制御を行う運動制御装置において、オーバーステア発生時における車両の挙動を好適に安定化させるとともに、オーバーステアの限界領域でドライバに違和感を及ぼすことを抑制し、また、制動力制御を終える際の制御の収束性を高めることができるようにする。
【解決手段】実旋回制御量が目標旋回制御量となるように操舵輪FL,FRの操舵角を制御する操舵制御ECU20と、実旋回制御量が目標旋回制御量となるように車両制動力を制御する制動及びエンジン制御ECU30と、を備えた車両の運動制御装置であって、制動及びエンジン制御ECUが車両のオーバーステア状態を検知して制動力制御を開始するタイミングを検出したことに基づいて、操舵制御ECUの制御が中止される、ことを特徴とする。
(もっと読む)
モータ制御装置
【課題】回転角センサを用いない新たな制御方式でモータを制御する。
【解決手段】切換制御部40は、モータ3の回転角速度ωに応じて第1モードと第2モードとの間で制御モードを切り換える。第1モードでは、仮想回転座標系であるγδ座標系のγ軸電流Iγでモータが駆動される。γδ座標系は、制御上の回転角である制御角θCに従う座標系である。一方、操舵トルクTがフィードバックされ、指示操舵トルクT*に操舵トルクTを近づけるように、加算角αが生成される。この加算角αが制御角θCの前回値θC(n-1)に加算されることにより、制御角θCの今回値θC(n)が求められる。第2モードでは、検出操舵トルクTに応じて二相指示電流値Idq*が設定されるとともに、誘起電圧推定部27などの働きによってロータの回転角が推定される。この推定により求められた推定回転角θEを用いてモータ3の制御が行われる。
(もっと読む)
運転支援装置及び運転支援方法
【課題】車両の運転者を補助する運転支援の実行中に、車両の運転者が受ける違和感を低減すること。
【解決手段】運転支援装置20は、操作予測部21と、走行軌跡生成部22と、走行機能制御部23とを備える。操作予測部21は、車両の運転者が運転操作をすることを、前記運転者が前記運転操作をする前に予測する。走行軌跡生成部22は、操作予測部21によって予測された運転操作の予測結果を踏まえて、前記運転者が運転する車両が目標とする目標走行軌跡を生成する。走行機能制御部23は、走行軌跡生成部22によって生成された目標走行軌跡と運転者の実際の運転操作とを調停した結果に基づいて、車両の走行機能を制御する。
(もっと読む)
プレビュー情報に基づいて運転支援の態様を変更する車輌
【課題】車輌運転支援装置に内在する作動遅れに相当する車輌走行距離以上に車輌より前方の位置にある走行経路の状況を事前に知ることにより、車輌がその位置に至ったときその走行経路状況により適した運転性能を有するように車輌運転支援の態様を先行制御する。
【解決手段】走行経路に沿って走行中の車輌の現在位置より走行経路に沿った前方の位置にある走行経路状況が第一と第二の状況の間に異なることに対応させて車輌の運転支援制御の態様を第一と第二の異なる態様の間で変更する。
(もっと読む)
電動パワーステアリング装置
【課題】オーバーステア状態の車両を安定させる方向に操向ハンドルを操舵するときに運転者にかかる負担を、効果的に軽減できる電動パワーステアリング装置を提供する。
【解決手段】車両Vがオーバーステア状態にあることをVSAECU30が判定したとき、EPSECU20が転舵輪2R,2Lの転舵角に応じて算出して転舵機構に付与する転舵角に応じた反力のゲインを低下して、オーバーステア状態の車両Vを安定させる方向に操向ハンドル21を操舵する運転者の負担を軽減できることを特徴とする電動パワーステアリング装置1とした。
(もっと読む)
車両接地面摩擦状態推定装置及びその方法
【課題】タイヤの摩擦限界に対する余裕度をより適切に推定する。
【解決手段】車両状態推定装置は、接地面において前記車輪のセルフアライニングトルクと前記車輪のスリップ度との比である入力を設定するためのタイヤスリップ角演算部43、セルフアライニングトルク演算部45及びセルフアライニングトルク−スリップ角比演算部46と、その入力を基に、車輪のグリップ特性を示すグリップ特性パラメータである出力を決めるためのトルク勾配演算部48及びμ勾配演算部49を備える。
(もっと読む)
スタビライザ装置とステアリングギヤ比変更装置とを備えた車両
【課題】アクティブスタビライザ装置とステアリングギヤ比変更装置とを備えた車両の実用性を向上させる。
【解決手段】(A)ある依拠パラメータを基準としたステアリングギヤ比rが標準ギヤ比rB(v)となるように、ステアリングギヤ比変更装置を制御する標準制御(S3)と、(B)スタビライザ装置が有するアクチュエータが駆動されない時に、ステアリングギヤ比rが標準ギヤ比rB(v)とは異なるように規定されたスタビライザ非作動時ギヤ比K・rB(v)となるように、ステアリングギヤ比変更装置を制御するスタビライザ非作動時制御(S4,5)とを選択的に実行可能に構成する。スタビライザ装置が非作動となった場合のロール剛性の低下に起因して、車両のロール剛性配分が変化した場合であっても、スタビライザ非作動時制御によって、操舵に対するヨーレートの変化を抑えることが可能である。
(もっと読む)
舵角比可変制御装置
【課題】旋回走行中にアクセル操作やブレーキ操作を行っても運転者に過大な操舵負担のかからない舵角可変制御装置を提供する。
【解決手段】ステアリングホイールの操舵角θsと前輪を転舵する目標ピニオン角θpとのVGSレシオn(V)を車速Vに応じて可変制御するVGS制御装置10において、補正係数設定部15は、旋回走行中にステアリングホイールを一定角度に保舵する場合における前後加速度Gに応じた補正係数k1と、旋回走行中にステアリングホイールを過渡的に操舵する場合における前後加速度Gに応じた補正係数k2とを設定した上で、補正係数kを設定し、VGSレシオ補正部13は、VGSレシオ設定部11によって設定されたVGSレシオn(V)に補正係数kを乗算することにより、前後加速度Gによるヨーレイト変化が生じないようにする。
(もっと読む)
1 - 20 / 82
[ Back to top ]