
Fターム[3D232CC30]の内容
走行状態に応じる操向制御 (73,124) | 制御目的 (7,801) | 安全性、信頼性 (2,661) | 検出精度の向上(センサ自体の精度の向上を含む) (158)
Fターム[3D232CC30]に分類される特許
1 - 20 / 158
ラック軸力推定方法及び電動パワーステアリング装置
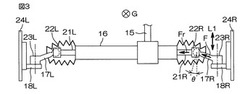
【課題】ステアリングホイールの回転運動をステアリングラック軸及びこれに連結されるタイロッドの直線運動に変換し、操舵輪の転舵を行う電動パワーステアリング装置において、常に精度の良いパワーアシスト制御を行うことのできる電動パワーステアリング装置を提供する。
【解決手段】車両の走行状態を表す物理量に基づいてステアリングラック軸16に作用するラック軸力Fを演算により推定し、ラック軸16と前記タイロッド17Rとの、車体の進行方向に垂直な面内に投影した交差角θを求め、前記交差角θに基づいて、推定された前記ラック軸力Fを補正する。
【効果】車両の走行中、車両が左右に傾いてサスペンションストロークが発生したときにラック軸力を過大に評価することがなくなる。
(もっと読む)
油圧パワーステアリング装置

【課題】操舵補助装置に供給される作動油の量を正確に制御することに貢献する油圧パワーステアリング装置を提供する。
【解決手段】油圧パワーステアリング装置1は、パワーシリンダー20と、パワーシリンダー20に供給される作動油の流れを制御するロータリーバルブ70(以下、「バルブ70」)と、バルブ70を駆動する電動モーター50と、電動ポンプ24とバルブ70とを接続するポンプ吐出油路92と、パワーシリンダー20とバルブ70とを接続する各供給油路93,94と、電動モーター50を制御する制御部30とを有する。油圧パワーステアリング装置1は、シャフト42の回転角度を検出する回転角センサ60を有し、バルブ70は、電動モーター50のシャフト42と一体的に回転する弁体と、各油路92〜94と接続される空間を内部に有するハウジングとを有し、制御部30は、電動モーター50の制御に回転角センサ60の出力を反映する。
(もっと読む)
車両用操舵装置
【課題】操舵部材のロック状態が解除された直後から、精度の高いロータ回転角を演算することができる車両用操舵装置を提供する。
【解決手段】EPSモータ制御部33の動作モードには、通常モードと強制回転モードとがある。通常モードは、ステアリングロック装置4によってステアリングホイール1の回転がロックされていない通常運転状態においてEPSモータ7を駆動制御するモードである。一方、強制回転モードは、イグニッションキーがオンされた直後において、ステアリングロック装置4によってステアリングホイール1の回転がロックされている状態で、EPSモータ7を強制的に回転駆動するモードである。EPSモータ7が強制回転モードで回転駆動されているときに、回転角演算部34は、各磁気センサ21,22が感知している磁極を特定する。
(もっと読む)
電動パワーステアリング装置の制御装置
【課題】電動モータの抵抗の推定精度が低下することを抑制することのできる電動パワーステアリング装置の制御装置を提供する。
【解決手段】電動パワーステアリング装置の電子制御装置30は、測定電流Imaおよび測定電圧Vmaを用いて第1抵抗値Raを算出する第1抵抗算出部61と、この第1抵抗算出部61とは異なる手段により第2抵抗値Rbを算出する第2抵抗算出部62とを有する。そして第2抵抗値Rbよりも小さい第1抵抗値Raを演算抵抗値として確定する。
(もっと読む)
操舵反力生成装置、車両及び操舵反力生成方法
【課題】基準ラック軸力をより高精度に推定すること。
【解決手段】基準ラック軸力演算部15Bの車体持ち上げエネルギ演算部15aは、操舵角に基づき、転舵されることにより発生する車体1Aの上下方向の変位による車体持ち上げエネルギを算出し、タイヤ摩擦エネルギ演算部15bは、操舵角に基づき、転舵によってそれら転舵輪と走行路面との間に発生する摩擦によるねじりトルクを算出し、セルフアライニングエネルギ演算部15cは、操舵角及び車速に基づき、セルフアライニングトルクを算出し、加算部15dは、車体持ち上げエネルギ、ねじりトルク、セルフアライニングトルクを加算して総エネルギ量を求め、ラック軸力演算部15eは総エネルギ量とラックストローク量とに基づき基準ラック軸力を推定する。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】高い静粛性を確保しつつ、より安定的にレゾルバレス制御を実行することのできるモータ制御装置を提供すること。
【解決手段】F/B制御部47は、F/Bゲイン可変制御部80が演算するフィードバックゲインを用いて、トルク偏差Δτに基づくトルクフィードバック制御を実行することにより第1変化成分dθτを演算する。また、F/Bゲイン可変制御部80は、第1変化成分dθτを加算角θaとする「第1の演算モード」、及び第1変化成分dθτを推定モータ回転角速度ωm_eにより補正した値を加算角θaとする「第2の演算モード」の各演算モードに応じて、二種類の異なるフィードバックゲインK1,K2を演算する。そして、第1の演算モードに用いるフィードバックゲインK1は、第2の演算モードに用いるフィードバックゲインK2との比較において、より応答性が高くなるように設定される。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】演算用モータ抵抗値の算出精度を向上させることができるモータ制御装置及び電動パワーステアリング装置を提供する。
【解決手段】モータ12を制御するECU11は、モータ12に流れる電流検出値Ieを検出する電流値検出部31と、モータ12に印加される端子間電圧Vtを取得する入力電圧設定部37と、電流検出値Ie及び端子間電圧Vtに対してフィルタ処理を施すフィルタ部40と、モータ12で発生する誘起電圧Eを算出する誘起電圧推定部43と、デューティ比微分値ΔDを算出する変化量算出部41と、フィルタ後電圧値Vtfをフィルタ後電流値Iefで除算してモータ12の今回の抵抗算出値Re(n)を求める抵抗算出部72と、誘起電圧Eが基準値以下であると共に、デューティ比微分値ΔDが基準変化量以下である場合に、今回の抵抗算出値Re(n)に基づき今回の演算用モータ抵抗値R(n)を設定する抵抗設定部73と、を備える。
(もっと読む)
モータ制御装置およびこれを備える電動パワーステアリング装置
【課題】算出するモータの抵抗値と実際のモータの抵抗値との差をより短い期間で小さくすることのできるモータ制御装置、およびこれを備える電動パワーステアリング装置を提供する。
【解決手段】この電動パワーステアリング装置は、ステアリングの操舵状態が保舵状態のとき、過去に算出したモータ抵抗値Rmに応じて算出されるフィルタ値Rfを用いたフィルタ処理により、モータ抵抗値Rmを算出する。また、前回の保舵状態において算出したフィルタ値Rfである前回フィルタ値Rfoldを今回の保舵状態において算出されるモータ抵抗値Rmに反映する補正係数Gを、回転状態のときの電流積算値に基づいて変更する。
(もっと読む)
電動パワーステアリング制御装置
【課題】路面反力トルクを正しく推定することができる電動パワーステアリング装置を提供する。
【解決手段】ドライバがハンドルに入力するトルクであるハンドルトルク、モータに生じるトルクであるモータトルク、路面反力トルクに応じてそれぞれ検出値が変化する3つのセンサ(トルクセンサ4、回転角速度センサ13、モータ電流センサ14)と、これら3つのセンサの検出値が入力され、これらの検出値に基づいて路面反力トルク推定値Tl_estを出力する路面反力推定器101とを備える。この路面反力推定器101として、推定する値の入力に対しては入力値と略等しい出力値を出力する応答性を備えるとともに、推定する値以外の入力に対しては略ゼロを出力する分離性を備える推定器であって、推定する値が路面反力トルクとされた推定器を用いる。
(もっと読む)
車両用制御装置
【課題】この発明は、車輪速から操舵角を推定することができ、舵角検出手段を搭載していない車両でも操舵角を推定して、操舵角情報を必要とする全ての制御を実行することが可能な車両用制御装置を実現することを目的とする。
【解決手段】この発明は、左車輪速を検出する左車輪速検出手段と、右車輪速を検出する右車輪速検出手段と、左車輪速と右車輪速とから左右輪回転差を算出する左右輪差算出手段と、左車輪速と右車輪速とから車速を算出する車速算出手段と、左右輪回転差と車速とに基づいて推定操舵角を演算する推定操舵角演算手段と、推定操舵角を更新するかどうかを判定する推定操舵角更新判定手段とを備えた推定操舵角計算手段を設けることを特徴とする。
(もっと読む)
回転角およびトルクのセンサ
【解決手段】 回転角およびトルクのセンサは、シャフト部分(1、2)と共に回転しないように接続されている2つの歯車(4、5)を備え、これら2つの歯車は、歯車(6、7)と噛合する。一方の歯車(7)には、単極磁石または多極磁石(12、13)が取着されている。他方の歯車(6)には、極の数に合った複数の磁束誘導部(17、18)が取着されており、L字形状を持つ。磁束誘導部(17、18)の一方の足部は、多極磁石(12、13)の方向を向き、他方の足部は、歯車(6)に平行に延伸し、一方の足部は歯車(6)の一方の側にあり、他方の足部は歯車(6)の他方の側にあり、これらの足部の間には、歯車(6)内に配されている第2のセンサ(16)が配されている。 (もっと読む)
電動パワーステアリング装置
【課題】ステアリングホイールの中点を正確に設定することで、その中点からの操舵量に応じた制御の適正化を図ることができる電動パワーステアリング装置を提供する。
【解決手段】変量検出部は、ヨーレートセンサを含む複数の変量検出部の検出値の絶対値が所定の範囲内にあり、かつ、ヨーレートセンサの検出値の今回値の絶対値が前回値の絶対値より小さいということを学習条件とする。そして、上記学習条件を満たすときに、その時点の検出操舵量を設定中点とする。
(もっと読む)
電動パワーステアリング装置
【課題】ステアリングホイールの中点を正確に設定することで、その中点からの操舵量に応じた制御の適正化を図ることができる電動パワーステアリング装置を提供する。
【解決手段】変量検出部は、複数種類の変量をそれぞれ検出する複数種類の変量検出手段を備え、制御部は、それぞれの検出値の絶対値が所定の範囲内にあり、かつ、それぞれの検出値の今回値の絶対値が前回値の絶対値より小さいことを学習条件とする。そして、上記学習条件を満たすときに、その時点の検出操舵量を設定中点とする。
(もっと読む)
電動パワーステアリング装置
【課題】電動モータの回転角速度に基づいて精確に電動モータを制御することのできる電動パワーステアリング装置を提供する。
【解決手段】この電動パワーステアリング装置は、モータ方程式に基づいて電動モータの回転角速度を算出する。そして、電動モータの運動状態に基づいてモータ方程式の近似式を算出し、この近似式に基づいてモータ方程式の逆起電圧定数を更新する。電動モータのトルクが付与される駆動体の動作に応じて信号を出力するセンサと、センサの出力信号に基づいて電動モータの回転角速度の演算値を算出する演算器とを備え、電動モータの電流の測定値が所定範囲内のとき、電動モータの電圧の測定値および前記回転角速度の演算値を記憶し、記憶した電圧の測定値の数または回転角速度の演算値の数が所定数以上のとき、近似式を算出する。
(もっと読む)
車両の位置姿勢測定装置
【課題】車両の位置姿勢を精度良く測定する車両の位置姿勢測定装置を提供する。
【解決手段】前輪を操舵する車両の位置および姿勢を検出するための車両の位置姿勢測定装置であって、ステアリング角(θ)を検出するステアリング角検出手段(1)と、車両の前後左右四輪の車輪速(PFl,PFr,PRl,PRr)を検出する車輪速検出手段(2−5)と、前記ステアリング角検出手段からの出力に基づいて実舵角(δFl,δFr)を演算する実舵角演算手段(6)と、前記実舵角と前記車輪速に基づきリアトレッドおよび後輪車輪半径のそれぞれの推定値(T†R,r†Rl,r†Rr)を演算するトレッド・車輪半径推定手段(7)と、前記推定値と後輪の前記車輪速に基づき車両の位置(x,y)および姿勢(γ)を演算する車両位置姿勢演算手段(8)と、を備え、任意の慣性座標系に対する車両の位置および姿勢を測定する。
(もっと読む)
電動パワーステアリング装置
【課題】電動モータの電気的抵抗が精度良く推定することが可能となる電動パワーステアリング装置を提供する。
【解決手段】電動パワーステアリング装置は、電動モータ20の電気的抵抗の推定値に基づいて同電動モータ20の回転速度を算出する。そして、舵角センサ54の出力が舵角一定条件を満たすとき、かつ、電動モータ20の誘起電圧が誘起電圧一定条件を満たすとき、電動モータ20の電気的抵抗の推定値を推定して更新する。
(もっと読む)
電動パワーステアリング装置
【課題】操舵系にアシスト力を付与するモータについて、その抵抗値を精確に算出することのできる電動パワーステアリング装置を提供する。
【解決手段】この電動パワーステアリング装置は、電流値Imおよび電圧値Vmに基づいて外乱オブザーバにより推定誘起電圧EXaを算出する。そして、推定誘起電圧EXaが所定範囲内にあるとき電流値Imおよび電圧値Vmに基づいて抵抗値を算出する。さらに、最後に取得した電圧値Vmよりも前に取得した電圧値Vm(過去電圧値)および最後に取得した電流値Imよりも前に取得した電流値Im(過去電流値)に基づいて外乱オブザーバの演算式を補正する。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】トルク変動の発生を抑えつつ、加算角に含まれるモータ回転角速度の推定誤差を補正して、安定的にレゾルバレス制御を実行することのできるモータ制御装置を提供すること。
【解決手段】加算角調整演算部は、トルク偏差Δτに基づき第1変化成分が演算される方向に応じて、推定モータ回転角速度(ωm_e)に対応する第1の閾値dθlim1、及び当該第1の閾値dθlim1よりも推定モータ回転角速度(ωm_e)から離れた値を有した第2の閾値dθlim2を設定する。そして、これら二つの閾値(dθlim1,dθlim2)により規定される制限範囲内に加算角θaを制限する。更に、加算角調整演算部は、制御角と実回転角との乖離を示す負荷角を推定する。そして、その負荷角が安定領域外にある場合には、上記第1の閾値dθlim1を、推定モータ回転角速度(ωm_e)から、その想定される推定誤差の最大値に対応する所定値N2離れた値に変更する。
(もっと読む)
電動パワーステアリング装置および設定方法
【課題】トルク計などの計測器を用いることなく、装置全体での製造ばらつきなどを考慮して左右の操舵特性をバランスさせることができる技術を提供する。
【解決手段】同軸的に配置された2つの回転軸の相対回転角度に応じた電気信号を出力する相対角度検出装置と、2つの回転軸のいずれか一方の回転軸に駆動力を付与する電動モータと、相対角度検出装置からの出力値と記憶領域に記憶された補正値とに基づいて操舵トルクを検出するトルク検出部と、補正値を設定する中立補正値設定部と、を備え、中立補正値設定部は、電動モータが右方向に予め定められた所定回転速度で回転したときの相対角度検出装置からの出力値である右側出力値と、電動モータが左方向に所定回転速度で回転したときの相対角度検出装置からの出力値である左側出力値とに基づいて補正値を設定する。
(もっと読む)
角度検出装置、操舵装置、作業車両、および角度検出方法
【課題】角検出精度を向上させることができる角度検出装置および角度検出方法の提供。
【解決手段】互いに位相差を有するsin信号およびcos信号を出力する角度センサと、sin、cos信号の信号変化率に基づいて、sin、cos信号の一方を選択して角度検出に用いる制御部と、を備え、制御部は、第1、第2信号の一方の信号変化率(電圧勾配)が他方の信号変化率(電圧勾配)よりも小さくなる場合に、選択される信号を前記一方から前記他方へと切り替える。このように2つの信号を選択的に用いることで、変曲点に近く分解能が悪い領域の信号値が角度検出に用いられることが回避されるので、角検出精度を向上させることができる。信号変化率の大小は、sin、cos信号の電圧に基づいて判断することができる。
(もっと読む)
1 - 20 / 158
[ Back to top ]