
Fターム[3D232DA33]の内容
走行状態に応じる操向制御 (73,124) | 制御入力信号 (24,979) | 車両運動状態量 (8,041) | ヨーレイト(ヨー角速度) (1,419)
Fターム[3D232DA33]に分類される特許
1 - 20 / 1,419
車両のパワーステアリング制御装置
ヨー応答ゲインの評価方法
車両用操舵装置
車両姿勢制御装置
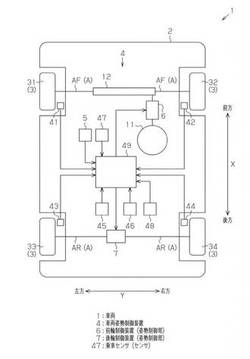
【課題】所定の乗車位置における乗り心地の向上に貢献する車両姿勢制御装置を提供する。
【解決手段】車両姿勢制御装置4は、車両1の姿勢を制御する前輪制御装置6および後輪制御装置7を備える。前輪制御装置6および後輪制御装置7の少なくとも一方は、車両1に乗っている乗員の数である乗員数および車両1に乗っている乗員の位置である乗車位置を検出する乗車センサ47の出力に基づいて車両1の姿勢を制御する。
(もっと読む)
ラック軸力推定方法及び電動パワーステアリング装置

【課題】ステアリングホイールの回転運動をステアリングラック軸及びこれに連結されるタイロッドの直線運動に変換し、操舵輪の転舵を行う電動パワーステアリング装置において、常に精度の良いパワーアシスト制御を行うことのできる電動パワーステアリング装置を提供する。
【解決手段】車両の走行状態を表す物理量に基づいてステアリングラック軸16に作用するラック軸力Fを演算により推定し、ラック軸16と前記タイロッド17Rとの、車体の進行方向に垂直な面内に投影した交差角θを求め、前記交差角θに基づいて、推定された前記ラック軸力Fを補正する。
【効果】車両の走行中、車両が左右に傾いてサスペンションストロークが発生したときにラック軸力を過大に評価することがなくなる。
(もっと読む)
車両姿勢制御装置
【課題】湾曲した道路を車両が走行するときの車両の操縦性の向上に貢献する車両姿勢制御装置を提供する。
【解決手段】車両姿勢制御装置4は、車両1の姿勢を制御する前輪制御装置6および後輪制御装置7と、車両1の目標姿勢を決定する演算装置49とを備え、前輪制御装置6および後輪制御装置7が、車両1の姿勢を、演算装置49により決定された目標姿勢に近づける。演算装置49は、車両1が走行している湾曲した道路の曲率に係る情報、および湾曲した道路の幅方向における車両1の位置に係る情報の少なくとも一方の情報に基づいて、道路の湾曲に沿って曲がる曲線の接線に対して車両1の前後方向に延びる左右中心軸のなす角度を決定する。
(もっと読む)
追従制御装置
【課題】自車両を先行車に適切に追従させる。
【解決手段】追従制御装置(100)は、通信により取得された先行車(20)に係る舵角情報に基づいて、自車両(10)を先行車に追従させる制御である追従制御を実施可能な追従制御装置である。該追従制御装置は、追従制御が実施されておらず、且つ、自車両の直進走行時における(i)先行車に係る舵角情報及び(ii)自車両に係る舵角を、夫々取得する取得手段(15)と、取得された先行車に係る舵角情報と取得された自車両に係る舵角との差分を算出し、該算出された差分を自車両の舵角中点として設定する設定手段(15)と、を備える。
(もっと読む)
車両用操舵装置及び荷役車両
【課題】車両旋回時、特にハンドルの戻し時に運転者の操舵負担を低減することができる車両用操舵装置及び荷役車両を提供する。
【解決手段】操舵部材10の操舵角を検出する操舵角検出部13と、操舵部材10に操舵反力を付与する反力アクチュエータ15と、車体のヨー角を検出するヨー角検出部33と、少なくとも操舵角検出部13によって検出された操舵角の関数として操舵反力を設定し、その設定された操舵反力を実現するように前記反力アクチュエータ15を制御する反力アクチュエータ制御部16とを備え、反力アクチュエータ制御部16は、ヨー角検出部33によって検出された車体のヨー角の変化に基づいて車体の旋回量を観測し、観測された旋回量が基準角以上であれば、前記操舵部材に付与する操舵反力を、通常よりも増大させる。
(もっと読む)
車両の障害物回避装置
【課題】
減速による障害物回避と横移動による障害物回避とを適切に選択できる車両の障害物回避装置を提供すること。
【解決手段】
自車両前方の障害物を認識する障害物認識部11と、自車両が走行している左右両側の車線の車線境界線を認識する車線境界線認識部12と、認識された障害物と認識された車線境界線との間隔Wl,Wrを認識する間隔認識部14と、認識された間隔Wl,Wrが予め設定された自車両の幅Wv以下である方向への横方向への障害物回避を禁止し、間隔Wl,Wrが自車両の幅Wvより大きい方向への横方向への障害物回避を許可し、自車両が認識された車線境界線を跨いで走行しているときには横方向への障害物回避を許可し、横方向への障害物回避が禁止された場合には車両を減速させる回避方向選択部15と、を備えた。
(もっと読む)
インホイールシステムを用いた車両制御方法
【課題】 車両の旋回安定性を確保しながらも、回転半径を最小化させることのできるインホイールシステムを用いた車両制御方法を提供する。
【解決手段】車両の各ホイールの内部にモータを装着して制御するインホイールシステムを用いた車両制御方法において、車両走行情報を基に車両の旋回モードを判断するステップと、旋回モードに対する車両の現在のアッカーマン率を計算するステップと、現在のアッカーマン率を基に制御命令を生成するステップと、制御命令を用いて各ホイールのモータをそれぞれ制御するステップと、を含むことを特徴とする。
(もっと読む)
車両制御システム
【課題】車両の挙動を安定させること。
【解決手段】車両10の旋回状態量に基づいた前輪Wfl,Wfrの転舵角又は前輪Wfl,Wfr及び後輪Wrl,Wrrの夫々の転舵角の制御により車両10の挙動制御を行う車両制御システムにおいて、旋回走行中で且つ前輪Wfl,Wfr及び後輪Wrl,Wrrの夫々の転舵角が制御されており、更に車両10の旋回状態が所定よりも大きい高G旋回領域にある場合に、前記前輪Wfl,Wfr及び後輪Wrl,Wrrの夫々の転舵角の制御における後輪Wrl,Wrrの転舵角制御の介入度合いを減少させる又は当該後輪Wrl,Wrrの転舵角制御を停止させること。
(もっと読む)
車線逸脱防止制御装置
【課題】突発的な外乱が生じた場合であっても車線逸脱を防止できる車線逸脱防止制御装置を提供する。
【解決手段】自車両の走行車線からの逸脱を防止するように操舵機構に操舵力を付与する車線逸脱防止制御装置を、自車両の横速度を検出する横速度検出手段と、走行車線からの逸脱を防止する方向へ目標横位置と自車両の横位置との偏差に応じて該偏差が大きくなる程大きい変化量で増加する操舵力を設定する操舵力設定手段と、横速度の増加に応じて走行車線からの逸脱を防止する方向への操舵力を増加補正する操舵力補正手段と、操舵力補正手段によって補正された操舵力に基づいて操舵機構に操舵力を付与する操舵力制御手段とを備える構成とする。
(もっと読む)
車両制御装置
【課題】制御特性を走行路に適したものとするために周回路などの走行環境を容易に判定できる車両制御装置を提供する。
【解決手段】車両に対する入力とその入力に応じて車両が示す挙動との関係である制御特性を変更できる車両制御装置において、前記車両が走行して得られた走行軌跡を記憶する(ステップS3)とともに記憶されている走行軌跡に基づいて同一走行路を走行していることを判定し(ステップS4)、同一走行路を走行していることの判定が成立した場合には前記制御特性をその走行路に適する特性に設定する(ステップS5)ように構成されている。
(もっと読む)
車両用前後輪転舵制御装置
【課題】ステアリング操作による前後輪自動追従制御時、ステア角とヨーレートの比例関係を保つことで、ドライバーに与える操作違和感を軽減すること。
【解決手段】車両用前後輪転舵制御装置は、前輪11,11及び後輪12,12がステアリング操作とは独立して転舵可能である4WS車1において、軌跡演算機21及び後輪舵角演算機22と、前輪舵角演算機23と、を備える。軌跡演算機21及び後輪舵角演算機22は、4WS車1の進行方向側に設定した車両前部定点αの軌跡を、4WS車1の進行方向とは反対側に設定した車両後部定点βがトレースするように、後輪転舵角ψを制御する。前輪舵角演算機23は、ステアリング操作による操舵角Θに基づく前輪転舵角(k1Θ)を、前後輪転舵角差を減じるように、後輪転舵角ψに応じて補正制御する。
(もっと読む)
制御装置およびフォークリフト
【課題】装置構成の大型化およびコスト増加を抑えつつ、意図しない旋回を防止できるようにする。
【解決手段】検出ヨーレートが想定ヨーレートの所定範囲外となるような場合に(s160)、検出ヨーレートの作用による本体2の旋回を相殺する方向へ駆動輪53を操舵させるべく操舵トルクを付与しているため(s180)、これにより検出ヨーレートが想定ヨーレートに近い値となる結果、意図しない旋回を防止することができる。このとき、検出ヨーレートを、実際のステアリング51の操作に応じたヨーレートである想定ヨーレートと所定範囲以内に近似させることにより、効果的に意図しない旋回が防止される。
(もっと読む)
車両用姿勢制御装置
【課題】ペダルの踏み込み量、ハンドル操舵量などを考慮して車両の姿勢制御を行うことにより、ドライバの意図するとおりの旋回走行をアシストすることができる車両用姿勢制御装置を提供する。
【解決手段】操舵角δと車速vとに基づいて、車両旋回時の目標横すべり角βsを算出する目標横すべり角演算部151と、操舵角速度δ′、アクセルペダルの踏み込み量A、アクセルペダルの踏み込み速度A′、フットブレーキペダルの踏み込み量Bの中から選択される少なくとも1つに対応して算出される横すべり角補正量Δβを用いて、前記目標横すべり角演算部151によって算出された目標横すべり角βsを補正する目標横すべり角補正部152と、前記目標横すべり角補正部152によって補正された目標横すべり角β*を用いて車両の姿勢制御を行う。
(もっと読む)
車両の走行制御装置
【課題】車両を目標走行ラインに沿って走行させるため操舵輪の舵角が目標舵角になるよう舵角可変装置を制御する方法を提供する。
【解決手段】操舵輪の舵角δが目標舵角δtになるよう舵角可変装置を制御することにより車両を目標走行ラインに沿って走行させる車両の走行制御装置に於いて、操舵輪の目標舵角に対する実舵角の追従性悪化の指標値δerrが基準値δcよりも大きいときには、車両の目標状態量γtは目標舵角に基づく車両の目標状態量に設定され、これにより舵角の追従性悪化に起因する車両の走行ラインの目標走行ラインからのずれが車両の目標状態量に基づく走行運動の制御によって低減される。
(もっと読む)
車両の走行制御方法及び走行制御装置
【課題】衝突回避制御に対し運転者が違和感を感じることを防止する。
【解決手段】車両制御コントローラ12が、運転者による車両1の操舵に対応する衝突回避軌道を選択し、選択した衝突回避軌道に基づいて走行するように車両1を制御する。これにより、衝突回避制御によって運転者が行っている車両操作、換言すれば運転者の反応が妨げられ、衝突回避制御に対し運転者が違和感を感じることを防止できる。
(もっと読む)
走行制御装置および車両
【課題】車両の進行先の影響を考慮しつつ、運転者に安心感を与えながら物体の衝突回避を行うことができる走行制御装置および車両を提供すること。
【解決手段】車両1の進路方向における仮想バンパー領域71を広く設定する。これにより、車両1の進行先にある物体80との衝突回避を確実に行うことができる。一方、車両1の進行方向とは異なる方向においては、仮想バンパー領域71が車両1の進行方向と比して相対的に狭く設定されるので、車両1の進行方向とは関係のない場所にある物体との衝突回避動作を抑制できる。よって、車両1の進行先の影響を考慮しつつ、運転者に安心感を与えながら物体80の衝突回避を行うことができる。
(もっと読む)
車両用走行制御装置
【課題】車線追従制御中、運転者が車線中央寄りに向かうことを目的として操舵操作の介入を行った場合に、運転者の操舵操作の負担を軽減することができる車両用走行制御装置を提供する。
【解決手段】車線追従制御手段(目標横位置設定部)は、運転者の車線中央lmへの復帰意図があると判定されると目標横位置Y*を車線中央lmに設定し、車線中央復帰意図判定手段(車線中央復帰意図判定部)は、運転者の操舵方向が車線の外側から中央lm側へ向かう方向であり、かつ、検出される操舵状態量(操舵トルクT)が第1の閾値よりも大きい第2の閾値(閾値T2)を越えたとき、または、検出される車両運動状態量(ヨーレートψ'、車速V)から推定される自車両MCの予想軌跡Sにおける所定の前方到達点(予想到達点)SPが車線中央lmを越えたとき、運転者の車線中央lmへの復帰意図があると判定する。
(もっと読む)
1 - 20 / 1,419
[ Back to top ]