
Fターム[3D232DA39]の内容
走行状態に応じる操向制御 (73,124) | 制御入力信号 (24,979) | 車両運動状態量 (8,041) | 車体横滑り角、角速度、角加速度 (165)
Fターム[3D232DA39]に分類される特許
1 - 20 / 165
車両姿勢制御装置
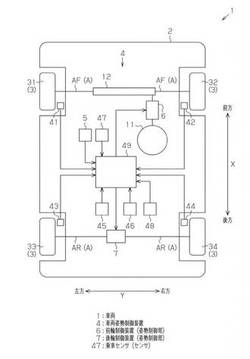
【課題】所定の乗車位置における乗り心地の向上に貢献する車両姿勢制御装置を提供する。
【解決手段】車両姿勢制御装置4は、車両1の姿勢を制御する前輪制御装置6および後輪制御装置7を備える。前輪制御装置6および後輪制御装置7の少なくとも一方は、車両1に乗っている乗員の数である乗員数および車両1に乗っている乗員の位置である乗車位置を検出する乗車センサ47の出力に基づいて車両1の姿勢を制御する。
(もっと読む)
車両姿勢制御装置

【課題】湾曲した道路を車両が走行するときの車両の操縦性の向上に貢献する車両姿勢制御装置を提供する。
【解決手段】車両姿勢制御装置4は、車両1の姿勢を制御する前輪制御装置6および後輪制御装置7と、車両1の目標姿勢を決定する演算装置49とを備え、前輪制御装置6および後輪制御装置7が、車両1の姿勢を、演算装置49により決定された目標姿勢に近づける。演算装置49は、車両1が走行している湾曲した道路の曲率に係る情報、および湾曲した道路の幅方向における車両1の位置に係る情報の少なくとも一方の情報に基づいて、道路の湾曲に沿って曲がる曲線の接線に対して車両1の前後方向に延びる左右中心軸のなす角度を決定する。
(もっと読む)
車両制御システム
【課題】車両の挙動を安定させること。
【解決手段】車両10の旋回状態量に基づいた前輪Wfl,Wfrの転舵角又は前輪Wfl,Wfr及び後輪Wrl,Wrrの夫々の転舵角の制御により車両10の挙動制御を行う車両制御システムにおいて、旋回走行中で且つ前輪Wfl,Wfr及び後輪Wrl,Wrrの夫々の転舵角が制御されており、更に車両10の旋回状態が所定よりも大きい高G旋回領域にある場合に、前記前輪Wfl,Wfr及び後輪Wrl,Wrrの夫々の転舵角の制御における後輪Wrl,Wrrの転舵角制御の介入度合いを減少させる又は当該後輪Wrl,Wrrの転舵角制御を停止させること。
(もっと読む)
車両用姿勢制御装置
【課題】ペダルの踏み込み量、ハンドル操舵量などを考慮して車両の姿勢制御を行うことにより、ドライバの意図するとおりの旋回走行をアシストすることができる車両用姿勢制御装置を提供する。
【解決手段】操舵角δと車速vとに基づいて、車両旋回時の目標横すべり角βsを算出する目標横すべり角演算部151と、操舵角速度δ′、アクセルペダルの踏み込み量A、アクセルペダルの踏み込み速度A′、フットブレーキペダルの踏み込み量Bの中から選択される少なくとも1つに対応して算出される横すべり角補正量Δβを用いて、前記目標横すべり角演算部151によって算出された目標横すべり角βsを補正する目標横すべり角補正部152と、前記目標横すべり角補正部152によって補正された目標横すべり角β*を用いて車両の姿勢制御を行う。
(もっと読む)
電動パワーステアリング装置
【課題】車輪回転速度が設計的に持つ誤差に起因するセルフアライニングトルクの誤推定による制御異常出力を防止することができる電動パワーステアリング装置を提供する。
【解決手段】操舵トルク検出手段で検出した操舵トルクに基づいて第1のトルク指令値を演算する第1のトルク指令値演算手段31と、車輪回転速度に基づいて第2のトルク指令値を演算する第2のトルク指令値演算手段32と、操舵トルクの異常を検出したときに、第1のトルク指令値に代えて第2のトルク指令値をモータ制御手段に出力する異常時切換手段34と備えている。第2のトルク指令値演算手段32は、車輪回転速度に基づいて推定したセルフアライニングトルク推定値に不感帯を設定し、不感帯反映後のセルフアライニングトルクに基づいて第2のトルク指令値を演算する。
(もっと読む)
車両の走行制御装置
【課題】車両の旋回走行時に、転舵機構を駆動するアクチュエータ系に失陥が生じる場合であっても、適切な走行制御を維持する。
【解決手段】走行制御装置は、前輪FL、FR及び後輪RL、RRの舵角を制御可能な転舵機構15、18を有する車両10の装置であって、転舵機構を駆動させる第1転舵手段400、500、600及び第2転舵手段300、310、320、330と、第1及び第2転舵手段が転舵機構を駆動させる際の動作の態様を制御する制御手段100と、第1転舵手段において失陥が生じたことを検出する検出手段410、510、610とを備え、制御手段は、第1転舵手段に失陥が生じた場合、車両の運動状態に対応する状態量が、第2転舵手段の動作により適用可能な範囲内で設定する目標状態量となるように、第2転舵手段を動作させる。
(もっと読む)
車両制御装置
【課題】 特定の制御デバイスに可動範囲を超えて負荷が集中することがないよう、制御量を適切に設定する。
【解決手段】 本発明の車両制御装置(1)は、車両(10)の挙動を制御する複数のアクチュエータ(300、400、500、800)と、車両の目標運動状態に対応する目標状態量を設定し、車両の運動状態に対応する状態量が目標状態量となるようにアクチュエータの夫々の制御量を算出する制御量算出手段(100)と、複数のアクチュエータの夫々について重み係数を設定する係数設定手段(100)と、複数のアクチュエータの夫々の制御量に対して重み係数を適用した値に基づく評価関数を算出する評価関数算出手段(100)と、評価関数が所定の条件を満たす制御量を複数のアクチュエータの夫々の最適制御量として用いて、複数のアクチュエータを動作させるアクチュエータ制御手段(100)とを備える。
(もっと読む)
車両挙動制御装置
【課題】複数の車両挙動制御装置のうち一の装置が故障した場合に、車両挙動の乱れを抑制しつつ他の装置へ切り替える。
【解決手段】車両挙動制御装置は、車両(10)の複数の車両挙動制御手段(400、500、600、800)から2以上を選択して車両の挙動を制御する挙動制御実行手段(100)と、選択された車両挙動制御手段のうち少なくとも一つの車両挙動制御手段が故障したか否かを判定する判定手段(100)と、故障したと判定された場合、故障したと判定された車両挙動制御手段と切り替え可能な予備挙動制御手段を選択する選択手段(100)と、予備挙動制御手段を用いた場合に、選択された車両挙動制御手段に係る制御量の変化量を演算する演算手段(100)と、演算された変化量に基づいて、故障したと判定された車両挙動制御手段と切り替えるべき予備挙動制御手段を決定する決定手段(100)と、を備える。
(もっと読む)
車両の横方向運動制御装置
【課題】 横方向運動制御中にドライバの操舵意図の有無を精度良く判断する。
【解決手段】 横方向運動制御装置は、車両のドライバの操舵意図の有無を判断する操舵意図判断部を備え、操舵意図判断部により操舵意図が有ると判断されたときに、制御対象制御部による制御対象の制御を停止する。また、操舵意図判断部は、車両のドライバによる操舵操作量を取得する操舵状態量取得部と、目標値に基づいて操舵操作量の閾値を設定する閾値設定部と、を備える。操舵意図判断部は、操舵操作量取得部により取得された操舵操作量の大きさと閾値設定部により設定された閾値とを比較することにより、操舵意図の有無を判断する。
(もっと読む)
車両運動制御システム
【課題】アプリケーションからの制御目標値に応じて制御プラットフォームが制御対象を最適制御する構造において、意図しない車両挙動が生じることを防止する。
【解決手段】制御目標値・アベイラビリティ比較部8にて、アベイラビリティ演算部5から伝えられるアベイラビリティ情報と制御要求部2などから伝えられる制御目標値とを比較し、その比較結果に基づいて車両横方向運動制御を実行するか否かを決める。これにより、アプリケーション1〜nや制御プラットフォームでのソフト的な異常による演算の誤りや、制御対象の制御に用いられるACT16〜19の異常、車両状態(例えば、路面μ)の急激な変化により、大きな車両の異常挙動を引き起こすことを防止できる。
(もっと読む)
車両用操舵装置
【課題】カウンターステア操作を行っている運転者の操舵フィーリングを向上させる。
【解決手段】車両用操舵装置は、車両に搭載され、操舵ハンドルに付与すべき目標操舵反力を操舵角及び車速に基づいて設定し、目標操舵反力を付与する反力制御を行う車両用操舵装置であって、車両がカウンターステア状態である場合には、目標操舵反力を補正する補正手段とを備える。補正手段は、操舵角に応じて目標操舵反力を規定する目標操舵反力マップにおいて、目標操舵反力Sが基準値(例えばゼロ)となる基準操舵角MA1を、特定手段によって特定された車体スリップ角θsに一致するように変更することにより、目標操舵反力を補正する。
(もっと読む)
車両の運動制御装置
【課題】車両の運動状態が変化して実車挙動観測装置による推定運動状態量の推定演算が中断したときの推定運動状態量の誤差を小さくできる車両の運動制御装置を提供することを課題とする。
【解決手段】実車挙動観測装置302が推定重心すべり角βactを推定する推定演算の代替値となる定常値を算出する定常値算出部302aを備える。そして、実車の運動状態が変化して、実車挙動観測装置302の推定重心すべり角βactの推定演算に不連続点が発生したとき、実車挙動観測装置302は、定常値算出部302aが算出する定常値を代替値とする推定演算によって、推定重心すべり角βactを推定する。
(もっと読む)
車両の制御装置
【課題】ヨーレートの発生を抑制しつつ車両を目標とする運動状態に維持する。
【解決手段】前輪(FL、FR)又は後輪(RL、RR)の舵角を、該舵角の変化を促すドライバ操作から独立して変化させることが可能な舵角可変手段(400)と、前記前輪及び後輪の各々について左右制駆動力差を生じさせることが可能な制駆動力可変手段(300、600)とを備えた車両(10)を制御する装置(100)は、平行移動を実現するための、該平行移動を規定する複数の第1状態量の目標値を設定する第1設定手段と、予め設定された前記複数の第1状態量と前記舵角及び前記左右制駆動力差に夫々相関する複数の第2状態量との相対関係を規定する車両運動モデル、並びに前記設定された複数の第1状態量の目標値に基づいて、前記平行移動を実現するための前記複数の第2状態量の目標値を設定する第2設定手段とを具備する。
(もっと読む)
車両用制御装置
【課題】燃費の悪化や車輪の偏摩耗が生じることを防ぐと共に、車両の走行安定性を向上させることのできる車両用制御装置を提供すること。
【解決手段】車両用制御装置100は、スリップ角に対するセルフアライニングトルクを角度で微分した角度微分値が所定の第1閾値以下であるかを判断し、角度微分値が第1閾値以下であると判断される場合に車輪のキャンバ角を調整する第1キャンバ角調整手段を備えているので、横力が飽和してグリップ力の限界に近付くことを予測し、車輪のグリップ力が限界を超える前にキャンバスラストを発生させて、著しいアンダーステア傾向、オーバーステア傾向やスピンなどの発生を未然に防止することができる。これにより、車両の走行安定性を向上させることができると共に、長時間に亘ってキャンバ角が付与されることによる燃費の悪化や車輪の偏摩耗が生じることを防止できる。
(もっと読む)
車両のヨーモーメント制御装置
【課題】 駆動力配分装置および横滑り防止装置を備えた車両において、両者の協調制御を的確に行って車両の安定性能の向上および制御応答性の向上を図る。
【解決手段】 駆動ヨーモーメントm8が最大駆動ヨーモーメントm10以下の場合には、協調制御部M11が駆動力配分装置Drに駆動ヨーモーメントm8を発生させるので、車両減速度を発生する横滑り防止装置VSAの作動を最小限に抑えて運転者の違和感を小さくすることができ、しかも駆動ヨーモーメントm8は立ち上がりが早いために、利き出しが滑らかであるだけでなく制御応答性が高められる。駆動ヨーモーメントm8が最大駆動ヨーモーメントm10を超えた場合には、協調制御部M11が駆動力配分装置Drに最大駆動ヨーモーメントm10を発生させるとともに、駆動ヨーモーメントm8に対する不足分を横滑り防止装置VSAに発生させるので、駆動力配分装置Drでは賄いきれない駆動モーメントm8を横滑り防止装置VSAで補って車両を安定化することができる。
(もっと読む)
車輪の制動力推定装置、及び、該装置を備えた車両の運動制御装置
【課題】
摩擦部材の摩擦係数に変動があっても、適正に各車輪の制動力を推定できる車輪の制動力推定装置を提供する。また、該装置によって推定された制動力に基づいて、車両の運動を安定化する車両の運動制御装置を提供する。
【解決手段】
車輪の制動力推定装置は、車両の各車輪に制動力を発生させる制動手段の摩擦部材の押付量を取得する押付量取得手段と、前記車両の前後加速度を取得する前後加速度取得手段と、前記前後加速度に基づいて前記車両に作用する減速力を演算し、該減速力及び前記押付量に基づいて前記制動力を推定する。前記推定手段は、前記車両の全ての車輪の前記押付量の総和に対する前記車両の1つの車輪の前記押付量の比率を、前記減速力に乗じることにより前記制動力を推定する。さらに、前記推定制動力に基づいて、制動制御及び操舵制御のうち少なくとも一方を実行して前記車両の運動を安定化する。
(もっと読む)
アーティキュレート車両における小旋回制御装置
【課題】車両オペレータの操作体による単純な小旋回用ブレーキ操作によって左右いずれか一方の車輪ブレーキを自動的に選択しつつ、制動力は車両オペレータの手動感覚で任意に調整できるアーティキュレート車両における小旋回制御装置を提供する。
【解決手段】メインブレーキマスタシリンダ51とは別に設置した小旋回ブレーキマスタシリンダ56からハンドブレーキレバー58の操作量に応じて発生し左右の車輪ブレーキ37,38または39,40に制動力として作用する制動圧の供給を、旋回内側に対応する左小旋回制御弁62または右小旋回制御弁64のいずれか一方により制御する。左小旋回制御弁62または右小旋回制御弁64のいずれか一方は、アーティキュレート角センサからの信号によりコントローラが自動的に選択して弁開状態に制御する。車両オペレータは、制動力を実感しながら車体の安定性を保持できるように微妙な調整を行なうことができる。
(もっと読む)
車両の挙動制御装置
【課題】車体スリップ角及びその微分値並びにその2階微分値に基づいて算出されるスピン状態量を制御量として車両のスピン挙動を抑制する挙動制御装置に於いて、急操舵時に制御による運転者のフィーリングの悪化を抑制すること。
【解決手段】本発明の装置は、車両の左右方向のうちの一方の方向に操舵が実行されて車体スリップ角の2階微分値の大きさが所定値を超えた後に所定値を下回るまで制御量に於ける車体スリップ角の2階微分値の寄与が低減されることを特徴とする。
(もっと読む)
車両物理量推定装置
【課題】スリップ角を精度よく推定することができる車両物理量推定装置を提供する。
【解決手段】車両物理量推定装置1は、車両物理量を推定するECU5と、車両Xのヨー角θを検出する車載カメラ4と、を備えている。この車両物理量推定装置1では、ECU5の車両物理量オブザーバ5aで推定したヨー角推定値θ^と車載カメラ4で検出したヨー角θとからオフセット誤差αが算出される。そして、このオフセット誤差αでもって、車両物理量オブザーバ5aで推定されたスリップ角推定値β^が補正される。つまり、スリップ角推定値β^が、検出したヨー角θ及び推定したヨー角推定値θ^に基づいて補正されることとなる。
(もっと読む)
車両用運転支援装置及び車両用運転支援方法
【課題】運転者の運転操作に応じて適切に運転支援を行うことができる車両用運転支援装置及び車両用運転支援方法を提供する。
【解決手段】運転者の運転操作と自車両の走行環境とを検出し、検出した運転操作が自車両の走行環境に応じた運転目的(前方物体との接触回避など)を達成不可能な運転操作であるとき、当該運転目的を達成するための運転操作支援力を発生するべく、操作支援アクチュエータを駆動制御する。ここでは、操舵および制動の少なくとも一方により運転操作支援を行う。
(もっと読む)
1 - 20 / 165
[ Back to top ]