
Fターム[3D232DA82]の内容
走行状態に応じる操向制御 (73,124) | 制御入力信号 (24,979) | 道路状況 (1,119) | 路面状況(雪道、砂利道、摩擦係数等) (363)
Fターム[3D232DA82]に分類される特許
1 - 20 / 363
車両姿勢制御装置
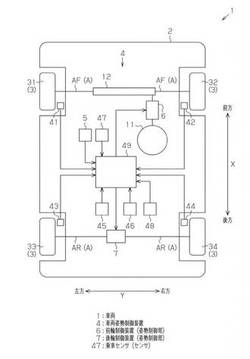
【課題】所定の乗車位置における乗り心地の向上に貢献する車両姿勢制御装置を提供する。
【解決手段】車両姿勢制御装置4は、車両1の姿勢を制御する前輪制御装置6および後輪制御装置7を備える。前輪制御装置6および後輪制御装置7の少なくとも一方は、車両1に乗っている乗員の数である乗員数および車両1に乗っている乗員の位置である乗車位置を検出する乗車センサ47の出力に基づいて車両1の姿勢を制御する。
(もっと読む)
運転支援装置

【課題】修正操舵を抑えつつ車線に沿った安定した走行を可能とする。
【解決手段】ステアリングバイワイヤ方式の操舵装置を備える。運転者が操舵する操作子の操舵量の変化に伴い周期的に付与操舵反力を操作子に入力し、一方向に向けた連続する操舵入力中に発生した上記付与操舵反力の数を検出する。そして、本発明は、検出した付与操舵反力の数に応じて、車線に沿って走行するための走行経路を選択し、選択した走行経路に沿って走行するように転舵輪4の転舵を制御する。
(もっと読む)
車両統合制御装置
【課題】左右輪差動制限機構の作動に伴う操舵トルク変化を精度よく抑制し、運転者のステアリング操作時の違和感を解消し、走破性と安定性とを両立させる。
【解決手段】電子制御式の左右輪差動制限機構81の拘束トルク制御量に比例して拘束トルク比例制御手段201が操舵力制御機構へ出力させる付加トルクと、操舵反力フィードバック制御手段204が操舵力制御機構へ出力させる、演算した操舵系反力を打ち消す方向の付加トルクとの割合を、前記左右前輪の回転速度差に応じて切り替える第1の前輪左右速差補正係数規定手段202、第2の前輪左右速差補正係数規定手段205、第1の乗算処理手段203、第2の乗算処理手段206および加算手段207とを備える。
(もっと読む)
走行支援装置及び方法
【課題】運転者の意図によって1次操舵後に2次操舵を行う場合に、不要な支援を低減する技術を提供する。
【解決手段】車輌の走行可能な走路からの車輌逸脱時に、車輌を前記走路内で走行させるように警告又は補助の支援を行う走行支援装置であって、1次操舵量が前記支援を停止するか否かの閾値となる第1所定量を超えたことにより、前記支援を停止しているときに、さらに2次操舵量が前記支援の停止を延長するか否かの閾値となる第2所定量を超える場合には、前記支援の停止を延長する。
(もっと読む)
車両および車両制御プログラム
【課題】搭乗者の進行したい方向を正確に汲み取りながら走行予定軌道を選択して自動走行を行うことができる車両および車両制御プログラムを提供すること。
【解決手段】第3車両位置予測処理(S107)によって、ステアリングホイール13の回転角速度Δδを取得してステアリングホイール13の操舵角を算出し、そのステアリングホイール13の操舵角から前輪2FL,2FRへ付与される操舵角を算出して、その前輪2FL,2FRへ付与される操舵角と車両速度とに基づいて車両1のヨーレートを推定し、その推定したヨーレートから所定時間後の車両位置を予測する。これにより、搭乗者の進行したい方向を、所定時間後の車両位置まで特定して把握しているので、予測された車両位置に基づいて走行軌道を選択することによって、搭乗者の進行した方向を正確に汲み取りながら走行予定軌道を選択して、自動走行を行うことができる。
(もっと読む)
車両および車両制御プログラム
【課題】操舵支援を行いながら、走行経路に沿って滑らかに車両を走行させることができる車両および車両制御プログラムを提供すること。
【解決手段】推奨軌道に沿って車両1が走行するためのハンドル13の推奨ハンドル角φiを定め、実際のハンドル角φjと推奨ハンドル角φiとの差の絶対値が大きいほど、大きな補助力Fを、ハンドル13に対して、ハンドル角が推奨ハンドル角φiへ近づく方向に付与する。これにより、搭乗者は、ハンドル13を回転操作させなくても、ハンドル13に対して付与される補助力Fの方向および大きさから、推奨ハンドル角φiへと近づけるためにハンドル13を操作すべき方向やハンドルの操作量を容易に把握できる。
(もっと読む)
車両および車両制御プログラム
【課題】搭乗者の進行したい方向を正確に汲み取りながら走行予定軌道を選択して自動走行を行うことができる車両および車両制御プログラムを提供すること。
【解決手段】車両の搭乗者による回転操作によって車両の操舵方向が指示されるステアリングホイール13が設けられており、新たな走行軌道を選択して設定すべき判定エリアに車両1が位置した場合は、搭乗者によるステアリングホイール13の回転操作に基づいて、車両1が操舵され(S5)、その車両1の操舵に基づいて実際に車両1に発生したヨーレートを用いて所定時間後の車両位置を第1車両位置予測処理(S7)により予測する。これにより、車両1が走行している路面の傾きに左右されることなく、搭乗者の進行したい方向を正確に把握できる。よって、搭乗者の進行したい方向を正確に汲み取りながら走行軌道を選択して自動走行を行うことができる。
(もっと読む)
車両用情報処理装置
【課題】簡易な構成で現在位置よりも先の車両位置における車両の旋回曲率を推定する。また、望ましくは推定された旋回曲率を車両挙動の安定化に利用する。
【解決手段】車両(1)に搭載される車両用情報処理装置(100)は、操舵入力に対応する操舵入力情報、旋回状態を規定する車両状態量及び車速に基づいて、前記車両の将来位置を算出する将来位置算出手段と、前記算出された将来位置を少なくとも一つ含み、且つ前記車両の現在位置に対応する車両位置を含む、前記車両に係る三以上の車両位置に基づいて、前記現在位置よりも先の暫定走行位置における前記車両の旋回曲率を推定する推定手段とを具備する。
(もっと読む)
操舵力制御装置
【課題】最小限の構成による簡素な構成で、車両姿勢が不安定となったときに適切に操舵補助力を付加し、ステアリング操作による車両の姿勢の安定化を促進させることのできる操舵力制御装置を提供すること。
【解決手段】電動パワーステアリング(10)を備えた車両(1)において、前輪(2L,2R)の左右車輪速差、または後輪(4L,4R)の左右車輪速差が所定車輪速差αより大、または当該左右車輪速差の変化率が所定変化率βより大であるような場合に(S3)、所定時間の間(S9)低車輪速側に操舵補助力を付加する。
(もっと読む)
車両の走行制御装置
【課題】ドライバ操舵との干渉による違和感を緩和しつつ、操舵入力情報を検出するデバイスの機能失陥時においても好適な軌跡追従性を確保する。
【解決手段】車両の走行制御装置は、車両の軌跡が目標路に近付くように舵角可変手段を制御する軌跡制御手段と、車両の運転者によりハンドルを介して操舵入力軸に与えられる操舵入力に関する操舵入力情報を取得する取得手段と、取得された操舵入力情報に応じて軌跡制御手段による軌跡制御の応答性を変更すると共に、操舵入力が取得出来ない場合に軌跡制御の応答性を向上させる応答性変更手段とを具備する。
(もっと読む)
車両用操舵装置
【課題】操舵用の電動モータのフェール時にも、転舵輪の向きを容易に変位することのできる車両用操舵装置を提供する。
【解決手段】電動モータ21,22のロータ31,41によって駆動されるボールナット48と、転舵軸6に設けられボールナット48にねじ結合されたねじ軸47とを含むボールねじ機構23が設けられている。転舵軸6の回転は、第1規制機構60によって規制されている。ねじ部材58は、ブッシュ26から取り外すことが可能である。ねじ部材58は、ハウジング5の第2雌ねじ部63およびロータ31の第2挿通孔64を挿通することにより、ロータ31,41の回転を規制する。このとき、ブッシュ26を回転させることにより、転舵軸6は、ボールナット48に対して回転しながら、軸方向X1に変位し、転舵輪の向きが変わる。
(もっと読む)
車両の統合制御装置
【課題】多機能化するブレーキシステムのそれぞれの機能を適切に調停し、ドライバの信頼性を高め、安全性を向上する。
【解決手段】ブレーキ制御ユニット30は、横すべり防止制御の機能とコーナリング制動制御の機能と車線逸脱防止ヨーモーメント制御の機能と車線逸脱減速制御の機能と追従走行制御の機能の5つの機能を有しており、車両のヨーモーメントを制御する横すべり防止制御の機能とコーナリング制動制御の機能と車線逸脱防止ヨーモーメント制御の機能は、横すべり防止制御の機能を最優先で実行し、次に、コーナリング制動制御の機能を優先して実行し、次いで、車線逸脱防止ヨーモーメント制御の機能を実行する。また、車両を減速制御する車線逸脱減速制御の機能と追従走行制御の機能は、減速指示値の大きい方の減速指示値を出力する。
(もっと読む)
車両挙動制御装置
【課題】制動装置による車両の挙動に対する介入を抑制し、燃費の低下を抑制することが可能な車両挙動制御装置を提供する。
【解決手段】制御ユニット1は、車両100の走行状態に基づいて、制動装置4,駆動力伝達装置5,操舵装置6,及び懸架装置7を制御する装置制御部10と、装置制御部10から制御対象の装置に対する制御量を示す情報を取得する制御量取得手段111、及び制御量取得手段111が取得した情報に基づいて、制動装置4,駆動力伝達装置5,操舵装置6,及び懸架装置7の制御量を減少させる指令信号を出力する制御量調整手段112を有する協調制御部11とを備える。
(もっと読む)
車両の制御装置
【課題】加減速度のある旋回に拡張したスタビリティファクタを適正化することのできる制御装置を提供することを目的とする。
【解決手段】車両が実際に旋回走行した際の互いに異なる値の三つの前後加速度を求め(ステップS2,S7,S9)、それらの前後加速度が求められた各走行時の実スタビリティファクタを求め(ステップS4)、加減速度のある旋回時に拡張したスタビリティファクタの関係式に前記前後加速度と前記実スタビリティファクタを代入して三元連立一次方程式を立てて前記係数および他の係数ならびに定数項の定数についてそれぞれの値を求め(ステップS10)、その求められた前記係数および他の係数ならびに定数項の定数を前記関係式に代入して、加減速度のある旋回に拡張したスタビリティファクタの定義式を更新する(ステップS11)。
(もっと読む)
車両の操舵力制御装置
【課題】オーバステア状態発生時、運転者のカウンタステア操作を補助するとともに、その後に運転者のカウンタステアの戻し操作をも補助し得る車両の操舵力制御装置の提供。
【解決手段】この装置では、車両が一方向に旋回している場合において、オーバステア状態量Josが増大しながら第1閾値ko1を跨いだことに基づいて、電気モータMTの駆動トルクを利用して車両のオーバステア状態を打ち消す方向の操舵力(第1操舵力)がステアリングホイールSWに対して付与される。これにより、カウンタステア操作が補助される。その後、オーバステア状態量Josが減少しながら第2閾値ko2(<ko1)を跨いだことに基づいて、電気モータMTの駆動トルクを利用して第1操舵力と逆方向の操舵力(第2操舵力)がステアリングホイールSWに対して付与される。これにより、カウンタステアの戻し操作が補助される。
(もっと読む)
車両運動制御装置
【課題】制御対象のアベイラビリティに応じて、より最適な制御対象を選択して車両運動制御を実行することができるようにした車両運動制御装置を提供する。
【解決手段】アベイラビリティ演算部5にて、アプリ情報に含まれるアプリケーションの要求に応じたアベイラビリティ変更や車両情報に応じたアベイラビリティ変更が行われるようにする。これにより、アプリケーションの要求や車両情報を反映して各制御対象のアベイラビリティを変更することが可能となり、より適切な制御対象を選択してアプリケーションの要求や車両情報に忠実な車両横方向運動制御を実行することが可能となる。
(もっと読む)
車両運動制御装置
【課題】制御対象のアベイラビリティに応じて、より最適な制御対象を選択して車両運動制御を実行することができるようにした車両運動制御装置を提供する。
【解決手段】F/B演算部7での制御対象の選択について、各制御対象のアベイラビリティである最大制御量から各制御対象のF/F要求値を引いた差から各制御対象の余裕度を演算し、この余裕度に基づいて行うようにする。これにより、余裕度がF/B要求値よりも大きな制御対象を選択して車両横方向運動制御を実行することが可能となる。したがって、より最適な制御対象を選択して車両横方向運動制御を行うことが可能となる。
(もっと読む)
車両の横方向運動制御装置
【課題】 車両挙動を安定化させつつ横方向運動制御を停止させることができる横方向運動制御装置を提供すること。
【解決手段】 横方向運動制御装置は、車両の横方向運動量の目標値に基づいて、車両の横方向運動量を変化させるために協調して作動する複数の制御対象の横方向運動制御量を演算し、演算した横方向運動制御量に基づいて複数の前記制御対象を制御する。また、複数の前記制御対象の制御を停止するか否かを判断する。複数の前記制御対象の制御を停止すると判断したときに、そのときから複数の前記制御対象の横方向運動制御量が縮退するように、複数の前記制御対象の横方向運動縮退制御量をそれぞれ決定し、決定した横方向運動縮退制御量に基づいて複数の前記制御対象を制御する。
(もっと読む)
車両運動制御装置
【課題】制御対象のアベイラビリティに応じて、より最適な制御対象を選択して車両運動制御を実行することができるようにした車両運動制御装置を提供する。
【解決手段】異なる複数の制御対象を制御してアプリ要求値を実現する車両横方向運動制御を行う場合に、各制御対象のアベイラビリティ(最大制御量および制御量の変化量を含む制御可能範囲)をVLP、より詳しくはVLPのF/F演算部6やF/B演算部7に伝え、アベイラビリティに基づいて車両横方向運動制御に使用する制御対象の優先順位を決定する。このように、各制御対象のアベイラビリティを加味して車両横方向運動制御に使用する制御対象の優先順位を決定しているため、制御対象のアベイラビリティに応じて、より最適な制御対象を選択して車両横方向運動制御を行うことが可能となる。
(もっと読む)
車両運動制御装置およびそれを有する車両運動制御システム
【課題】制御対象のアベイラビリティに応じて、より最適な車両運動制御を実行することができるようにした車両運動制御装置を提供する。
【解決手段】異なる複数の制御対象を制御してアプリ要求値を実現する車両横方向運動制御を行う場合に、各制御対象のアベイラビリティ(最大制御量および制御量の変化量を含む制御可能範囲)をアベイラビリティ演算部5から制御要求部1に対して伝える。これにより、各アプリケーションでアベイラビリティ情報を踏まえて、性能限界を超えない制御要求を生成することが可能となり、制御対象のアベイラビリティに応じて、より最適な車両運動制御を実行することが可能となる。
(もっと読む)
1 - 20 / 363
[ Back to top ]