
Fターム[3D232DA87]の内容
走行状態に応じる操向制御 (73,124) | 制御入力信号 (24,979) | 車外からの情報 (852) | GPS (411)
Fターム[3D232DA87]に分類される特許
161 - 180 / 411
車両用操舵装置及び車両制御装置
【課題】積載状況の変化やタイヤの空気圧等の変化に関わらず、ドライバの意図に沿ったコースを精度よく走行できる車両用操舵装置を提供する。
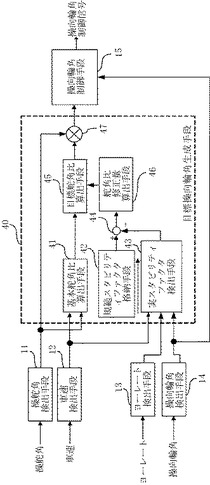
【解決手段】車両の操舵角を検出する操舵角検出手段11と、車両の速度を検出する車速検出手段12と、車両のヨーレートを検出するヨーレート検出手段13と、車両の操向輪角を検出する操向輪角検出手段14と、検出された操舵角、車速、ヨーレート及び実操向輪角に基づいて、目標操向輪角を生成する目標操向輪角生成手段40と、目標操向輪角生成手段40が生成する目標操向輪角に基づいて車両の操向輪角を制御する操向輪角制御手段15とを備え、目標操向輪角生成手段40は、車両に発生する実旋回半径相当値である実スタビリティファクタと車両により予め定められた規範旋回半径相当値である規範スタビリティファクタを用いて、目標操向輪角を生成する。
(もっと読む)
位置演算装置

【課題】
従来技術によれば、演算精度が悪化するような状態でも同一の処理を継続するため、演算精度が悪化する状態である部分の演算結果の影響により全体の精度が悪化する、という課題がある。
【解決手段】
位置演算装置は、移動体状態を計測する状態計測部と、移動体状態に基づいて移動体の状態量を計算する状態量計算部と、移動体の位置を計算する位置計算部と、移動体状態の推定値を計算する状態推定部と、移動体が進行方向に対して横方向にふらついているか否かを判定するふらつき判定部と、ふらつき判定部が移動体はふらついていると判定した場合、推定値を選択し、ふらつき判定部が移動体はふらついていないと判定した場合、状態量を選択し、選択した何れか一方を位置計算部に出力する選択部を備える。
(もっと読む)
走行軌跡生成方法及び走行軌跡生成装置
【課題】燃費特性を考慮した走行軌跡を生成する走行軌跡生成方法及び走行軌跡生成装置を提供することを課題とする。
【解決手段】車両の将来の走行軌跡を生成する走行軌跡生成装置1であって、少なくとも道路境界線の条件を含む拘束条件を収束演算する拘束条件演算手段31と、拘束条件演算手段31での拘束条件を満たしている状態で、少なくともブレーキ減速放熱総量の評価を含む評価関数によって収束演算して走行軌跡を導出する評価関数演算手段31とを備えることを特徴とし、駆動方式がハイブリッド方式の場合には回生中にエネルギを取り出す際の損失の評価も含む評価関数とすると好適である。
(もっと読む)
乗り物
【課題】 車椅子のように旋回自在で歩道、建物内などの場所で低速走行可能であると同時に、一般道路などもある程度高い速度で走行して長距離運転を可能とする。
【解決手段】 乗り物は、独立に転舵される左右転舵輪WHfl,WHfrと、独立に駆動される左右駆動輪WHrl,WHrrとを備えている。左右駆動輪WHrl,WHrrは、リンク機構により車体BDに連結され、左右転舵輪WHfl,WHfrおよび左右駆動輪WHrl,WHrr間の長い伸長状態と、左右転舵輪WHfl,WHfrおよび左右駆動輪WHrl,WHrr間の短い収縮状態とに切換えられる。伸長状態では、車体BDの路面に対する傾斜角が小さくなり、ジョイスティック13の前後左右の操作により通常車両のように運転が制御される。収縮状態では、車体BDの路面に対する傾斜角が大きくなり、ジョイスティック13の前後左右の操作により小回り低速運転が制御される。
(もっと読む)
車両用駐車支援装置
【課題】 簡易な制御システムにて車庫入れを適切に行うことができるようにする。
【解決手段】 第1旋回制御においては、旋回方向と逆側の車両の進行方向側角部Aが初期位置における進行方向側角部Aを通り車幅方向に延びる直線(ラインL1)に沿って移動し、かつ、旋回方向と逆側の車両の反進行方向側角部Bが初期位置における反進行方向側角部Bを通り車両前後方向に延びる直線(ラインL2)に沿って移動するように、4輪の転動距離に対応した目標転舵角を設定する。角部Bが所定距離αだけ移動すると、第2旋回制御に切り替わり、角部Bを旋回中心として車両が旋回するように4輪の目標転舵角を設定する。
(もっと読む)
地図情報作成装置及び車両の操作特性変更システム
【課題】拡張性・保守性に優れ、記憶容量が小さい地図情報を作成できる地図情報作成装置、及び車両の操作特性変更システムを提供すること。
【解決手段】車両を運転するドライバのドライバ操作の変化を検出するドライバ操作変化検出手段4、7と、前記ドライバ操作変化検出手段4、7が前記ドライバ操作の変化を検出したときに、前記車両の位置情報を取得する位置情報取得手段8と、前記ドライバ操作の変化と、そのドライバ操作の変化があったときの前記位置情報とを関連づけて記憶する地図情報作成手段6と、を備えることを特徴とする地図情報作成装置。
(もっと読む)
車両の走行制御装置
【課題】走行ルールに違反した原因を調査可能な車両の走行制御装置を提供する。
【解決手段】車両に搭載され、当該車両の走行を制御する走行制御装置10であって、車両の周辺の走行ルールにしたがって車両の走行を制御する走行制御部35と、車両による走行ルールの違反を判定する違反判定部37と、違反判定部により走行ルールの違反が判定された場合に、走行制御部の制御内容を記憶する記憶処理部38と、を備える。
(もっと読む)
情報管理サーバ、駐車支援装置、駐車支援装置を備えたナビゲーション装置、情報管理方法、駐車支援方法、情報管理プログラム、駐車支援プログラム、および記録媒体
【課題】運転者に車庫入れ技能を認識させるとともに、車庫入れの支援をおこなうこと。
【解決手段】情報管理サーバ100は、設定部101と、受信部102と、判断部103と、送信部104とを備える。設定部101には、駐車スペースにおける、移動体の駐車開始から駐車完了までの走行軌跡情報と、運転者の車庫入れ技能のランクとが対応付けられて設定される。受信部102は、走行軌跡情報を移動体から受信する。判断部103は、受信部102によって受信された走行軌跡情報に基づいて、設定部101に設定されるランクを判断する。送信部104は、判断部103によって判断されたランクを移動体に送信する。
(もっと読む)
キャンバ角制御装置
【課題】車両の旋回性能を確保しつつ省燃費性能を得ることができるキャンバ角制御装置を提供すること。
【解決手段】キャンバ角付与装置4が制御され、車輪2にキャンバ角が付与されると、車輪2の第1トレッド21と第2トレッド22との接地比率が変更される。これにより、第1トレッド21の高グリップ性と第2トレッド22の低転がり抵抗とを使い分けることができ、車両1の旋回性能を確保しつつ省燃費性能を得ることができる。また、本発明によれば、旋回外輪の接地比率と旋回内輪の接地比率とをそれぞれ個別に変更するので、旋回外輪の接地比率と旋回内輪の接地比率とを一定とする場合と比較して、旋回外輪の接地比率および旋回内輪の接地比率を旋回の度合いに応じて適正に変更することができる。よって、旋回性能および省燃費性能の向上を図ることができる。
(もっと読む)
車両用駐車支援装置
【課題】 簡単な制御にて車両を狭い駐車スペースに旋回駐車できるようにする。
【解決手段】 旋回方向と逆側の車両の進行方向側角部Aが初期位置における進行方向側角部Aを通り車幅方向に延びる直線(ラインL1)に沿って移動し、かつ、旋回方向と逆側の車両の反進行方向側角部Bが初期位置における反進行方向側角部Bを通り車両前後方向に延びる直線(ラインL2)に沿って移動するように、4輪の転動距離に対応した目標転舵角を設定する。これにより、ハンドル操作なしに車体サイズの限界に近い狭いL字状コースに車両を進入させて駐車することができる。
(もっと読む)
車両用の制御装置
【課題】車両の運転者の操作量の変化に対して、機能装置の制御量を指数関数的に変化させる制御をおこなうにあたり、車両を取り巻く環境が変わっても、制御量の変化に対して、運転者が違和感を持つことを抑制できる、車両用の機能装置を提供する。
【解決手段】車両の乗員によって操作される操作装置と、操作装置の操作状態に基づいた機能を発生する機能装置と、操作装置の操作状態に基づいて、機能装置の目標機能を決定する目標機能決定装置と、決定された目標機能に基づいて、機能装置で発生する機能を制御するコントローラとを有する、車両用の制御装置において、操作装置における操作状態の変化に対して、目標機能決定装置で決定する目標機能の変化量を、指数関数を含む数式を用いて求める第1演算手段(ステップ2)と、数式で用いる指数として、車両がおかれる環境の変化に基づいて変更される変数を用いる第2演算手段(ステップS2)とを有する。
(もっと読む)
電動パワーステアリング装置
【課題】カーナビゲーション装置と連携することにより出力不足や、他の電装品への悪影響の発生を回避する。
【解決手段】モータ4に電力を供給する主電源9と、前記モータ4に電力を供給することが可能な補助電源10と、前記主電源9に基づいて前記補助電源10の充電を行うとともに、前記主電源9のみによって前記モータ4へ電力を供給する第1の出力状態と、前記主電源9及び補助電源10から前記モータ4へ電力を供給する第2の出力状態とを選択的に構成する充放電回路13と、外部にナビ情報を送信可能なカーナビゲーション装置30からの当該ナビ情報を受信するとともに、前記ナビ情報から車両が高速操舵予測エリアに存在するか否かを判断し、車両が高速操舵予測エリアに存在すると判断するときは前記充放電回路13を前記第2の出力状態とし、存在しないと判断するときは前記充放電回路を前記第1の出力状態とする制御回路6とを備えている。
(もっと読む)
操舵制御装置
【課題】運転者が意図した通りの車両姿勢で平行移動を実現させる操舵制御装置を提供すること。
【解決手段】前後輪を同位相にする平行移動モードを含む複数の操舵モードを切り替えながら実行する操舵制御装置100は、車両姿勢を検出する車両姿勢検出手段10と、平行移動モードにおける目標車両姿勢を決定する目標車両姿勢決定手段11と、車両姿勢検出手段10が検出した車両姿勢と目標車両姿勢とに基づいて前輪及び後輪のうちの少なくとも一方を転舵させ車両姿勢を修正する車両姿勢修正手段12と、を備える。
(もっと読む)
自動車両航法システムのための部分手動制御状態
移動中の車両を自動制御するための方法および装置を開示する。警報状態が検出され、その警報状態に応答して車両の現在の曲率半径が維持される。曲率半径は、センサから受け取ったデータを使用することによって計算することができる。警報状態は、不安定になりつつある車両または自動航法システムの誤動作によるものである可能性がある。車両は、オペレータ制御入力に応答して手動制御状態に置かれる。  (もっと読む)
(もっと読む)
車両の電動パワーステアリング装置
【課題】 電源装置50,100を適切なタイミングで診断して、その診断結果を運転者に報知することにより安全性の向上を図る。
【解決手段】 電源診断部62は、ナビゲーション装置70によって行われる目的地までのルート案内を利用し、車両走行方向を変更指示する走行誘導情報が入力されたとき、電源装置50,100の電源供給能力を診断する。そして、電源供給能力が低下している場合には、報知器90を作動させて運転者にその旨を報知する。従って、運転者は、電源状態を認識した状態で操舵操作できるため、操舵アシストトルクが不足してハンドル操作感覚が通常時と異なっても、あわてることなく適切にハンドル操作を継続することができる。
(もっと読む)
操舵制御装置
【課題】停車することなく連続的なモード切替を許容しつつ、モード切替時の後輪操舵アクチュエータへの負荷を低減すること。
【解決手段】本発明は、前後輪をそれぞれ独立に舵角制御し、走行中若しくは運転者による転舵中における2WSモードと4WSモードの連続的なモード切替を許容した操舵制御装置において、前輪若しくは後輪が中立位置にならない状態でモード切替を禁止することを特徴とする。
(もっと読む)
コンテナクレーンの走行制御装置
【課題】駆動輪に取り付けられた走行モータの回転数を個別に制御して、直進走行させる際の駆動輪間の速度差を小さくすることができ、コンテナクレーンを運転するオペレータの乗り心地を向上させることができるコンテナクレーンの走行制御装置を提供すること。
【解決手段】タイヤ式走行装置11eにより、コンテナヤードに並列にして設けられた複数の帯状のコンテナ設置スペースに沿って走行するコンテナクレーン3の走行制御装置13であって、前記コンテナヤードの設計段階における設計値、あるいは竣工時に実際に計測した計測値に基づいて作成されたコンテナ設置スペース毎の傾斜方向、傾斜量、および傾斜量に対応した前記タイヤ式走行装置11eの旋回角をデータベースとして備え、走行しようとするコンテナ設置スペースが変わる度に、前記タイヤ式走行装置11eの旋回角を設定し直すように構成されている。
(もっと読む)
操舵制御装置
【課題】運転者が意図する運転内容と運転者による操舵操作の内容とが矛盾する場合に、運転者が意図しない運転内容を実現させてしまうのを防止する操舵制御装置を提供すること。
【解決手段】前後輪の操舵を制御可能な操舵制御装置100は、運転者が意図する車両の運転内容を事前に判断する運転内容判断手段10と、その運転内容と矛盾する操舵操作を禁止又は抑制する操舵操作制限手段14とを備える。
(もっと読む)
電動パワーステアリング制御装置
【課題】走行時の操舵フィーリングや安全性を損なうことなく、路面情報が加味された目
標操舵補助力を求めるためのマップへの切り替えと、路面状況にも対応した操舵補助とを
実行することができる電動パワーステアリング制御装置を提供すること。
【解決手段】ステアリング1の操舵状態に基づいて決定された目標操舵補助力に基づいて
ステアリング1の操舵補助を行う電動機の駆動を制御する制御手段と、路面情報を取得す
る路面情報取得手段22aと、自車位置情報を取得する自車位置情報取得手段22bと、
路面情報が加味された目標操舵補助力を求めるためのマップを作成するマップ作成手段2
2cと、切替タイミング設定スイッチ32の設定状態、路面情報取得手段22aにより取
得した路面情報、及び自車位置情報取得手段22bにより取得した自車位置情報に基づい
て、作成されたマップへの切り替え処理を行うマップ切替手段22dとを装備する。
(もっと読む)
車両自動誘導方法およびその装置
自動誘導車両の自動操舵のための方法および装置が開示される。オペレータが車両の制御を要求すると、操舵シャフト(112)に結合されたセンサ(110)がそれを検出する。そこで、センサは、その要求を表す情報を自動誘導システムの1つまたは複数の制御部(104、116)に伝送し、自動誘導システムが自動操舵機能の停止操作を開始する。このようにして、システムは、自動誘導および操舵車両において、迅速に手動操舵に復帰する。  (もっと読む)
(もっと読む)
161 - 180 / 411
[ Back to top ]