
Fターム[3D232DA87]の内容
走行状態に応じる操向制御 (73,124) | 制御入力信号 (24,979) | 車外からの情報 (852) | GPS (411)
Fターム[3D232DA87]に分類される特許
121 - 140 / 411
運転支援装置、運転支援方法および運転支援プログラム
【課題】道路状況に応じた適切なレーン逸脱抑制制御を行うことができなかった。
【解決手段】自車両が走行している自車走行道路と前記自車走行道路における自車走行レーンを含む前記自車両の位置を示す情報を取得し、前記自車両の位置より前方で前記自車走行道路と接続する接続道路が存在する場合、前記自車走行道路に対する前記接続道路の属性を示す情報を取得し、前記属性に応じて、前記自車走行道路の進行方向を基準とした左右方向のうち、レーン逸脱抑制制御の程度を変更させる変更方向を設定し、設定された前記変更方向のレーン逸脱抑制制御の程度を変更させる。
(もっと読む)
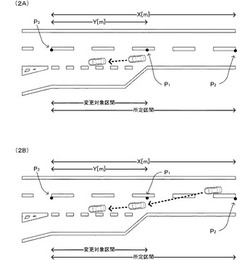
走行制御装置、及び走行制御方法

【課題】自車両の車線変更などの横移動を抑制するタイミングを最適化する。
【解決手段】自車両の側方に存在する側方物体を検出し(ステップS3)、走行車線に対して自車両が車頭時間Tt後に到達する後刻横位置Xfを推定し、側方物体を検出している状態で、後刻横位置Xfが所定横位置XLに達したときに、側方物体の側への自車両の車線変更を抑制するものであって、自車両が側方物体の側に横移動するときの走行車線に対する横速度Vxを検出し(ステップS6)、この横速度Vxが速いほど、後刻横位置Xfが所定横位置XLに達しやすくなるように、後刻横位置Xfを補正する。すなわち、横速度Vxが速いほど、1よりも大きい値になる補正ゲインαを算出し(ステップS7)、推定した後刻横位置Xfに補正ゲインαを乗じることで、この後刻横位置Xfを補正する(ステップS11)。
(もっと読む)
車両の運転支援装置
【課題】自車両のドライバが視認可能な障害物と視認困難な障害物との双方に対して適切なタイミングで運転支援を行う。
【解決手段】障害物を検出した場合、自車両のドライバが視認可能な第1の障害物か視認困難な第2の障害物かを判断し(S2)、各障害物の衝突リスク(ベース値)を修正し、第2の障害物の衝突リスクが第1の障害物の衝突リスクよりも大きくなるように調整する(S3)。そして、第2の障害物の衝突リスクR2を閾値Rcと比較し、R2≧Rcのときに第2の障害物に対する警報を出力する(S5)。また、R2<Rcのときには、第1の障害物の衝突リスクR1を閾値Rccと比較し、R1≧Rccの場合、衝突の危険性があると判断して自動ブレーキや回避操舵を行う(S7)ことで、自車両のドライバが視認可能な障害物と視認困難な障害物との双方に対して適切なタイミングで運転支援を行い、安全を確保する。
(もっと読む)
走行制御装置、及び走行制御方法
【課題】前方の障害物などを操舵回避する際の、無用な制御介入を制限する。
【解決手段】自車両の側方に存在する側方物体を検出し(ステップS3)、走行車線に対して自車両が車頭時間Tt後に到達する後刻横位置Xfを推定し、側方物体を検出している状態で、後刻横位置Xfが所定の閾値XLに達したときに、側方物体の側への自車両の車線変更を抑制するものであって、自車両が側方車両の側とは逆方向に横移動することを検知したら回避フラグをFa=1にセットし(ステップS6)、その後、今度は側方車両の側に横移動を開始したら復帰フラグをFr=1にセットする(ステップS7)。こうして復帰フラッグがFr=1にセットされたら、設定時間Tmが経過するまで抑制フラグをF=0にリセットし、横移動の抑制を禁止する(ステップS9)。
(もっと読む)
車両の走行安全装置
【課題】自車が横風を受けるような走行状況にあるときの安全性を向上させるようにした車両の走行安全装置を提供する。
【解決手段】自車の進行方向の前方を撮像して得た画像に基づいて設定された、自車が走行すべき目標経路に沿って走行するように自車の操舵をアシストする目標経路維持走行制御を実行する走行制御部を備えた車両の走行安全装置において、自車に作用する横風の発生を推定し(S16)、横風の発生が推定される場合、目標経路維持走行制御を実行する(S22)。
(もっと読む)
車体流れ抑制装置
【課題】路面の横勾配による車体流れを抑制する制御の最適化を図る。
【解決手段】路面の横勾配による車体流れを抑制する車体流れ抑制装置1であって、所定の条件を満足したときに車体流れ状態であると検知する車体流れ検知部20を備え、車体流れ検知部20により車体流れ状態が検知されたときに車体流れを抑制する制御を行い、ナビゲーション装置8から得られる情報が、車体流れが発生し易い場所であることを示しているときには、前記条件を緩和する補正、または、車体流れ抑制制御の制御量を増大する補正を行う。
(もっと読む)
運転者覚醒装置
【課題】運転者を覚醒させる際に走行に与える影響を小さくすることができる運転者覚醒装置を提供することを目的とする。
【解決手段】運転者を覚醒させる運転者覚醒装置であって、運転者の覚醒状態を検出する運転者状態推定部11と、運転者が非覚醒状態の場合には、運転者を保持する保持具の張力を増加させて刺激を与えるシートベルト張力発生装置36と、シートベルト張力発生装置36の作動時の体移動量を検出し、体移動量が検出されたときに操舵量を検出した場合には、操舵をキャンセルする操舵キャンセル部13と、を備えて構成することで、例えば運転者の眠りが深いときなどの無抵抗状態時に、張力強化時の体移動に伴って運転者の意図しないステアリング操舵が発生した場合であっても、走行に不必要なステアリング操舵をキャンセルすることができるので、運転者を覚醒させる際に走行に与える影響を小さくすることが可能となる。
(もっと読む)
アドバイス情報提示装置、及びプログラム
【課題】ドライバの理解度や上達度に応じた適切なアドバイスを提示する。
【解決手段】所定の走行路状況と所定の走行路状況におけるドライバの適切な行動との組が複数個記憶され、適切な行動の各々に対応させて、適切な行動を促すための各々詳細度が異なるアドバイス情報が記憶され、かつ表示装置14aやスピーカ14bにより提示が許可されたアドバイス情報の詳細度である提示詳細度が組毎に記憶されたHDD12bを備え、所定の走行路状況が検出された場合に、検出されたドライバの行動が、検出された走行路状況に対応する何れかのドライバの適切な行動であるときには、対応する組の提示詳細度が低くなるように変更される(ステップ126)と共に、適切な行動でないときには、対応する組の提示詳細度が高くなるように変更される(ステップ114)。
(もっと読む)
運転支援装置
【課題】車線変更確率の精度向上が図られ、車線変更確率に応じて運転支援を実行することが可能な運転支援装置を提供すること。
【解決手段】運転者の加減速操作に関する運転特徴を示す第1の学習値に基づいて車線変更確率を算出する。運転者の操舵操作に関する運転特徴を示す第2の学習値と、自車両周辺環境および/または運転者情報とに基づいて車線変更確率を補正する。これらにより、精度良く車線変更確率を求めることができ、運転者の意思による車線変更と、運転者の意思によらない車線逸脱との判別の精度向上を図ることが可能となる。また、車線変更確率に応じて運転支援を制御する運転支援手段を備える構成とし、補正されて精度が向上された車線変更確率に応じて、好適に運転支援を実行する。
(もっと読む)
車両制御装置
【課題】ドライバにとって快適な車両運動を実現することができるようにする。
【解決手段】走行環境検出部50によって走行路状態を検出し、操舵周波数検出部52によって操舵周波数を検出する。車両特性設定部54によって、走行路状態、操舵周波数、又は切り替えスイッチ18のオンオフ状態に基づいて、目標となる車両運動の特性を設定する。位相差決定部56によって、設定された車両運動特性に応じて、ヨー角速度の変化に対する横加速度の変化の位相差を示す第1変化差と、横加速度の変化に対するロール角速度の変化の位相差を示す第2変化差とを決定する。そして、操舵角制御部64によって、決定された第1変化差が実現されるように、前後輪の各々の操舵角を制御し、減衰特性ばね力制御部60によって、決定された第2変化差が実現されるように、サスペンションの減衰特性及びばね力を制御する。
(もっと読む)
車両制御装置
【課題】カーブなどにおいて車両の道路逸脱の可能性を抑制するとともに運転者の操舵に関する意思も十分に考慮する車両制御装置を提供する。
【解決手段】旋回状態変更指令に基づいて旋回状態を変更する旋回状態変更機構を備えた車両制御装置。車両の進行方向に存在するカーブの形状を含むカーブ特性情報と、運転者の視線に関する視線情報とを入力して、これらの情報に基づいて旋回状態変更機構1へ旋回状態変更指令を出力するカーブ走行評価手段50が備えられている。
(もっと読む)
旋回制御装置
【課題】運転者の操舵を補助するための出力を小さくすることができ、消費されるエネルギーを小さくすることができるようにする。
【解決手段】車両のボディと、該ボディに対して回転自在に配設され、タイヤに、転がり抵抗が小さくされた低転がり抵抗領域が形成された車輪WLF、WRFと、操舵装置と、該操舵装置の操舵を補助するための操舵補助装置と、該操舵補助装置による操舵の補助が必要であるかどうかを判断する操舵補助判定処理手段と、操舵の補助が必要である場合に、前記車輪WLF、WRFにキャンバ角を付与し、前記低転がり抵抗領域を路面に接触させる出力軽減処理手段とを有する。操舵の補助が必要である場合に、低転がり抵抗領域が路面に接触させられるので、操舵補助装置の駆動部に加わる負荷が小さくなる。
(もっと読む)
運転支援装置
【課題】自車両周辺の移動体が規定されている交通ルールを違反した場合でも自車両に対して適切な運転支援を行うことができる運転支援装置を提供することを課題とする。
【解決手段】移動体の交通ルールに基づいて運転支援を行う運転支援装置1であって、任意の領域において移動体が遵守する可能性の高い交通ルールを取得する交通ルール取得手段11,12,13を備え、交通ルール取得手段で取得した交通ルールに基づいて運転支援を行うことを特徴とし、特に、任意の領域において規定されている交通ルールと交通ルール取得手段で取得した交通ルールとが整合しない交通ルール逸脱領域を取得する領域取得手段13、あるいは、任意の領域において規定されている交通ルールと交通ルール取得手段で取得した交通ルールとが整合しない場合には交通ルール取得手段で取得した交通ルールに修正する交通ルール修正手段を備える構成とするとよい。
(もっと読む)
運転支援装置
【課題】カーブ進入時における運転者の違和感を軽減した運転支援装置を提供する。
【解決手段】車両の運転を操舵トルクの付与により支援する運転支援装置において、車速検出手段120と、操舵角、ヨーレート、求心加速度の少なくとも1つを検出する操舵実際値検出手段130と、カーブの曲率を取得するカーブ曲率取得手段110と、操舵目標値を算出する操舵目標値算出手段160と、操舵機構10へ操舵トルクを付与する操舵制御を実行する操舵制御手段170と、操舵目標値と操舵実際値に基づいて操舵制御の実行を予測する操舵制御予測手段180と、操舵制御の実行が予測される時に操舵制御の実行に先立って第1の減速制御を実行する第1の減速制御手段180とを備える構成とする。
(もっと読む)
4輪操舵機構を搭載した車両の操舵制御装置
【課題】4WS車両に於いて、前後輪が同相にて操舵される条件で、緊急回避時など車両の横方向に大きく移動をさせたいときに、その方向に十分に移動できるように後輪操舵制御が修正された操舵制御装置を提供すること。
【解決手段】本発明の車両の4輪操舵制御装置は、車両の走行条件に基づいて後輪を前輪に対して同相又は逆相にて操舵するよう後輪舵角を制御する後輪操舵制御部と、車両をその横方向に移動させるべき状態を検出し横方向の目標移動距離を決定する目標移動距離決定部とを含み、車両を横方向に移動させるべき状態を検出したときには、目標移動距離に基づいて決定される期間、後輪が前輪に対して逆相に操舵され、後輪の同相にての操舵を遅らせることを特徴とする。
(もっと読む)
車両の運動制御装置、及び車両の運動制御方法
【課題】車両の進行方向に複数の障害物が存在する場合において、車両が各障害物のうち少なくとも1つの障害物と接触し得る緊急状態であるときには、該障害物との接触によって車両が被る損傷を小さくできる車両の運動制御装置、及び車両の運動制御方法を提供する。
【解決手段】各ECUは、車両の進行方向に存在する各障害物のうち少なくとも1つの障害物に車両が接触する可能性がある場合(ステップS12が肯定判定)において、回避制御によって車両と各障害物との接触を回避可能であるとき(ステップS15が肯定判定)には、回避制御を実行する。一方、各ECUは、回避制御を実行しても車両が少なくとも1つの障害物に接触する可能性があるとき(ステップS15が否定判定)には、損傷低減走行軌跡55を設定し(ステップS19)、該損傷低減走行軌跡55に車両の実際の走行軌跡が接近するように損傷低減姿勢制御を実行する(ステップS20,S21)。
(もっと読む)
車線変更支援装置
【課題】
従来の車線変更支援装置では、白線情報を自車と周囲車両の相対情報を算出するために用いているのみであり、道路情報から自車の車線変更支援をして良い場所か否かを判断していない。そのため、車線変更が法律で禁止されている隣車線への車線変更を支援したり、これ以上速度を出すと危険なカーブ曲率の大きい道路で加速制御をしてしまう、いう課題があった。
【解決手段】
車線変更支援装置は、車線変更を支援する機能を許可する第1の制御モードと、車線変更を支援する機能を禁止する第2の制御モードと、自車が走行する道路情報を取得する道路情報取得部と、自車と周囲車両との相対情報を取得する相対情報取得部と、前記道路取得部が取得した道路情報に基づいて制御モードを選択する選択部と、前記相対情報取得部が取得した相対情報及び前記選択部が選択した制御モードに基づいて自車を制御する制御部と、を備える。
(もっと読む)
運転誘導装置および運転誘導方法
【課題】道路走行において運転者の個人差を考慮した適切な操舵タイミングの報知を実現し得る運転誘導装置および運転誘導方法を提供する。
【解決手段】車両状態検出装置111、撮像装置112、顔向き検出装置113および頭部/車体ヨー時間差演算部114により、運転者の頭部挙動および車両挙動を検出して両者の時間差を演算し、ナビゲーション装置115によりコーナーの曲率、並びに該コーナーに対する車両位置を検出し、駆動タイミング演算部117により操舵を開始すべき理想操舵開始位置を算出し、運転者の頭部挙動および車両挙動の時間差、並びに理想操舵開始位置に応じて、運転者に操舵を開始するタイミングを触覚による乗車用シート118を介して報知する。
(もっと読む)
車両用操舵制御装置
【課題】車線維持制御が中断されるときもセルフアライニングトルクによるステアリングホイールの急峻な中立位置への戻りを抑制する車両用操舵制御装置を提供する。
【解決手段】ステアリングホイールから入力された操舵トルクに応じて乗員の操舵をアシストするための操舵アシスト制御を行なうと共に、操舵速度に応じて反力を付与するEPS制御ユニット66と、自車の進行方向の前方に設定された目標点を通過するように自車の走行を制御するLKAS制御ユニット64と、それらの操作量に基づいてEPSモータ38に供給すべき操作量を算出する車両用操舵制御装置において、目標点に到達するために必要な自車の運動パラメータ(横加速度)を算出し、算出された運動パラメータが増加するにつれて増加するように設定されるダンピングゲインKdrrを乗じて操舵反力制御の操作量(ダンピング電流指令値)を補正する。
(もっと読む)
負荷反応ステアリングシステム用遮断弁
【課題】並列ステアリング回路を有するステアリングシステムにおいて、負荷反応機構を組込む。
【解決手段】本発明のステアリングシステムは、流体アクチュエータ22と、流体アクチュエータに選択的に流体接続する電気−油圧式ステアリング回路18と、電気−油圧式ステアリング回路18に並列に配置されて流体アクチュエータ22に選択的に流体接続する油圧式ステアリング回路20とを含む。油圧式ステアリング回路20は、負荷反応機構及び遮断弁を含み、遮断弁によって負荷反応機構を有効及び無効にする。
(もっと読む)
121 - 140 / 411
[ Back to top ]