
Fターム[3D232DA87]の内容
走行状態に応じる操向制御 (73,124) | 制御入力信号 (24,979) | 車外からの情報 (852) | GPS (411)
Fターム[3D232DA87]に分類される特許
41 - 60 / 411
自律走行制御装置
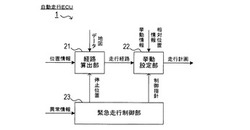
【課題】緊急時に車両の状態に応じてより迅速かつ的確な走行制御を行うことが可能な自律走行制御装置を提供する。
【解決手段】自律走行ECU1では、車両の周囲の状況(相対位置情報)に応じて走行計画を設定すると共に、他のECUからの異常情報に基づいて車両を緊急停止させる必要があると判定した場合には、制御系統の異常部位以外の特定部位である使用可能部位と予め設定された緊急停止モードとから一意に決まる制御指針に従って、車両を停止させるための走行計画を再設定する。しかも、車両における乗員および危険物の有無の少なくとも一方の情報に基づいて緊急停止モードを選択し、車内優先モードまたは車外優先モードのいずれかを走行計画の再設定に反映させることにより、緊急時の車内の状況に応じて、車両と車両の周囲とのいずれかの安全を的確に重視した制御を行うことが可能となる。
(もっと読む)
車両運動制御装置及びプログラム

【課題】簡単な構成のマップを用いて、移動する障害物を回避するための車体合成力及び回避軌道を導出する。
【解決手段】自車両の速度のx成分vx0、y成分vy0、障害物の速度のy成分Zv、位置のy成分Z0、及び車体合成加速度の最大値F0/mを用いた各々異なる3つのパラメータを演算し、設定された横移動距離Yeに対して縦移動距離が最短となる回避を行う場合の予測回避時間teを導出するための3次元マップを用いて予測回避時間teを導出し、導出された予測回避時間te後の障害物の位置のy成分を横移動距離Yeとして設定し、設定された横移動距離Yeに対して縦移動距離が最短となる車体合成力を導出するための最短2次元マップを用いて、移動する障害物を回避するために横移動距離に対する縦移動距離が最短になる車体合成力及び回避軌道を導出する。
(もっと読む)
車両の制御装置
【課題】ヨーレートの発生を抑制しつつ車両を目標とする運動状態に維持する。
【解決手段】前輪(FL、FR)又は後輪(RL、RR)の舵角を、該舵角の変化を促すドライバ操作から独立して変化させることが可能な舵角可変手段(400)と、前記前輪及び後輪の各々について左右制駆動力差を生じさせることが可能な制駆動力可変手段(300、600)とを備えた車両(10)を制御する装置(100)は、平行移動を実現するための、該平行移動を規定する複数の第1状態量の目標値を設定する第1設定手段と、予め設定された前記複数の第1状態量と前記舵角及び前記左右制駆動力差に夫々相関する複数の第2状態量との相対関係を規定する車両運動モデル、並びに前記設定された複数の第1状態量の目標値に基づいて、前記平行移動を実現するための前記複数の第2状態量の目標値を設定する第2設定手段とを具備する。
(もっと読む)
後退駐車支援制御装置および後退駐車支援制御装置用のプログラム
【課題】車載カメラによって撮影された車両後方画像から駐車枠線を検出する技術において、ドライバの運転負担を軽減すると共に、車両の後退開始位置までの車両の変位量を検出する必要性を低減する。
【解決手段】後退駐車支援制御装置が、撮影画像から、駐車枠探索範囲のウインドウ31、32を抽出し、抽出されたウインドウの範囲内で、駐車枠線を検出するようになっており、ウインドウ31、32の抽出時は、車両1の現在のステアリング角で基準距離Lだけ後退したと仮定した場合の車両1’の後端部の近傍に限定して、ウインドウ31、32を抽出する。
(もっと読む)
走行車両自動操舵用駆動装置
【課題】異なる走行車両に対応する汎用性の高い自動操舵駆動装置を提供するとともに、緊急時の手動ハンドル操作を可能にする自動操舵駆動装置を提供すること。
【解決手段】電磁クラッチのオンオフにより中間軸駆動用の正逆転モータを作動制御してステアリングシャフトを自動操舵モードで駆動制御する自動操舵制御手段を設け、例えはクラッチペダルのオン、左又は右のブレーキペダルのオン又は前後進レバーが前進側又は後進側に移動されるなどの何らかの走行車両の挙動操作が行われると、該自動操舵制御手段は正逆転モータによる自動操舵モードを禁止する制御とすることで走行安全性を確保する。
(もっと読む)
車両の周辺監視装置
【課題】車両に搭載されたカメラにより撮像した画像に基づいて車両の周辺の対象物を検出し、該対象物についての警報を運転者に発行した場合に、該警報が発せられることによって車両のふらつきが発生することがある。
【解決手段】車両に搭載された撮像装置によって撮像した画像に基づいて車両周辺の対象物を検出し、該撮像画像に基づく表示画像を、該車両の乗員が視認可能なように表示装置上に表示する。対象物が車両から所定範囲内にあるときには、該表示画像上に該対象物に関する警報を行う。該車両には、運転者によるステアリングホイールの操舵を補助するパワーステアリング装置が備えられており、少なくとも上記の警報を発している間にわたり、ステアリングホイールの操舵を補助するアシスト量を低減するように、パワーステアリング装置を制御する。
(もっと読む)
車両用制御装置
【課題】燃費の悪化や車輪の偏摩耗が生じることを防ぐと共に、車両の走行安定性を向上させることのできる車両用制御装置を提供すること。
【解決手段】車両用制御装置100は、スリップ角に対するセルフアライニングトルクを角度で微分した角度微分値が所定の第1閾値以下であるかを判断し、角度微分値が第1閾値以下であると判断される場合に車輪のキャンバ角を調整する第1キャンバ角調整手段を備えているので、横力が飽和してグリップ力の限界に近付くことを予測し、車輪のグリップ力が限界を超える前にキャンバスラストを発生させて、著しいアンダーステア傾向、オーバーステア傾向やスピンなどの発生を未然に防止することができる。これにより、車両の走行安定性を向上させることができると共に、長時間に亘ってキャンバ角が付与されることによる燃費の悪化や車輪の偏摩耗が生じることを防止できる。
(もっと読む)
自動運転装置
【課題】 自車両の自動運転を行うにあたり、自車両の周囲における交通環境に応じた走行制御を行うことにより、自車両の周囲における交通環境の妨げを防止することができる自動運転装置を提供する。
【解決手段】 自動運転装置における自動制御ECU1は、走行中の道路に対して道なりに走行させる自動運転制御を行うにあたり、自車両が走行する車線の状態を検出し、検出した車線の状態に基づいて、自動運転制御を行う。たとえば、自車両が走行する道路に自車走行車線が道なり走行可能である道なり車線があるにも係わらず、自車両が道なり車線でない車線を走行している場合には、自車両を道なり車線に移動させる進路を生成する。また、自車両が走行する道路に道なり車線が複数ある場合には、道なり走行に好適となる道なり車線に自車両を移動させる進路を生成する。
(もっと読む)
車両の運動制御装置
【課題】具体的な制御指針をドライバに提示することにより、ドライバが自己の運転操作に対する指針を得られるような車両の運動制御装置を提供することにある。
【解決手段】中央コントローラ40の理想運動制御部42は、車両の前後方向の加加速度情報を用いて、車両の操舵を制御する。HVI(Human Vehicle Interface)55には、運転者に操舵を開始するタイミング決定のための情報が提示される。運転者は、HVI(Human Vehicle Interface)55により提示される情報に基づいて、操舵開始タイミングを制御する。情報提示手段は、運転者に操舵を開始するタイミング決定のための情報を提示する。情報提示手段により提示される情報に基づいて、運転者により前記操舵開始タイミングが制御される。
(もっと読む)
車両運動制御装置
【課題】車体合成力の最大値が楕円で制限される場合において、簡単な構成のマップを用いて目標位置及び目標位置における速度方向に到達させるため最適な軌道及び車体合成力を導出する。
【解決手段】車体合成力の最大値が縦横比γ0の楕円で制限される場合において、車体合成力の最大値を設定して、車体合成加速度の最大値の車体前後方向の成分F1/m、縦横比γ0、目標位置の車体横方向の成分Ye、自車両の速度の車体前後方向の成分vx0、及び車体横方向の成分vy0により演算される第1及び第2のパラメータと、最短回避軌道を導出するために導入された第1の導入パラメータμ1に関する値、第2の導入パラメータμ2に関する値、及び特定の条件の下、最短距離XsとYeとで示される位置に到達する時間との関係を定めたマップを用いて、目標位置及び目標位置における速度方向に到達させるために回避距離が最短となる軌道及び車体合成力を導出する。
(もっと読む)
車両用電源制御装置
【課題】本発明は、限りある供給可能電力を有効利用することができる、車両用電源制御装置の提供を目的とする。
【解決手段】車両に搭載される複数の電気負荷(電動パワステ1や電動スタビ2など)と、これらの電気負荷に対して電力を供給するバッテリ10やオルタネータ12とを備え、ドライバーの視線を検出する視線検出装置20や道路情報を有するナビゲーション装置21などによって取得可能なこれらの電気負荷の作動を予知させる予兆情報に基づいて、これらの電気負荷の作動に伴う電力需要を推定し、その推定結果に応じてこれらの電気負荷のそれぞれに対するバッテリ10等からの電力供給を調整することを特徴とする、車両用電源制御装置。
(もっと読む)
車道のカーブ区間のカット軌跡を求める方法および制御装置
ここで提案されているのは、車両(326)による車道のカーブ区間(320)のカットを可能にするカーブ軌跡を求める方法である。ここではカーブ区間(320)についての情報を受信し、セグメント長および開始点曲率を有する少なくとも1つの曲線セグメントにこのカーブ区間を分割(320)する。ただしこの曲線セグメントは、直線セグメントであるか、円弧セグメントであるか、または曲率が曲線セグメントの弧長の関数である曲線セグメントである。ここでは上記の少なくとも1つの曲線セグメントからカット軌跡(330)を求めて、このカット軌跡が、上記カーブ区間(320)の所定の点において、前記レーンの中央(328)を基準にしてあらかじめ設定した偏差量(332)を有するようにする。 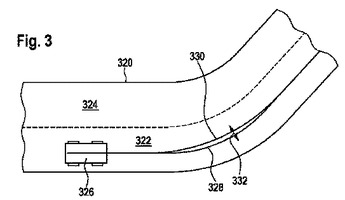 (もっと読む)
(もっと読む)
車両用運転支援装置
【課題】車両の前進時に、内輪差による捲き込みを回避するように運転者を十分に支援すること。
【解決手段】車両前方を撮像する撮像手段と、前記撮像手段によって撮像された画像を表示し、該表示された画像上でユーザーが車両前方の回避ポイントを設定可能な画像表示・回避ポイント設定手段と、運転者に情報提供可能な情報提供手段と、前記運転者が前記回避ポイント側に規定量のステアリング操作を行なっても前記回避ポイントを回避して走行可能なステアリング操作許容ポイントを算出し、車両が該算出したステアリング操作開始許容ポイントに至ると所定の情報提供を行なうように前記情報提供手段を制御する制御手段と、を備える車両用運転支援装置。
(もっと読む)
移動運搬手段のためのステアリング機構のユニバーサル作動および制御
【課題】ユニバーサルで、様々な異なる種類の運搬手段による使用のために、容易に取り付けられ、実装され得るような無人運搬手段用の遠隔ナビゲーションシステムを提供する。
【解決手段】移動運搬手段のステアリング機構用の作動および制御システム2であって、該システム2は、2つの反対の方向に回転可能である駆動軸を含むモータ4と、該移動運搬手段の該ステアリング機構に固定されるように構成される固定構造40と、該モータ4を該固定構造40と結合するリンク構造20であって、それにより、該駆動軸の回転運動が該固定構造40に伝えられて、該移動運搬手段の該ステアリング機構の制御を容易にする、リンク構造20とを備える、システム。
(もっと読む)
群走行制御装置及び群走行制御方法
【課題】処理負荷を抑えつつ群の挙動を乱さないような干渉回避行動を行う。
【解決手段】自車両M0を囲うように設定されて他車両との干渉を少なくとも規定の進行方向変更からなる回避行動で回避可能な干渉回避エリアAR−1を有すると共に、自車両M0の周囲に位置する他車両と車車間通信をしながら群走行を行う群走行制御装置である。上記進行方向変更による回避量は、上記干渉回避エリアAR−1において、自車両M0の側方位置に比較して、自車両M0の前方位置が大きく設定する。自車両M0に対する相対距離が小さな他車両を干渉回避対象として選択する。干渉回避対象が自車両M0の干渉回避エリアAR−1のどの位置に侵入したかを検出する。検出された干渉回避対象の位置、及びその干渉回避対象が位置する干渉回避エリアAR−1内の位置に応じた進行方向変更の回避量に基づき、上記干渉回避対象に対し、自車両M0の回避動作を行わせる。
(もっと読む)
車両制御装置
【課題】走行安全性、またはドライバ操作に対する車両応答性を考慮して、自由度の高い運転計画の生成や車両制御を行うことが可能な車両制御装置を提供することを目的とする。
【解決手段】運転計画生成ECU18は、自車または他車両の走行実績のある前後Gxおよび横Gyに基づいて、路面μの上限および下限を設定し、路面μの上限以下の範囲で、または、下限以上の範囲で路面μを算出することにより、走行安全性、またはドライバ操作に対する車両応答性を考慮して、自由度の高い運転計画の生成や車両制御を行う。
(もっと読む)
車両用接触回避支援装置
【課題】レーンキープアシスト手段によって車両が操舵制御されているときには、接触回避支援処理が過剰に作動しないようにする。
【解決手段】接触回避ECU20は、レーンキープアシスト部96によって車両10が操舵制御されているときは、車両10が自車線302を逸脱する可能性がきわめて低いことを考慮し、レーダ80によって検出された車両前方の対向車11との相対位置に基づき得られる接触余裕値Laの閾値Laを、レーンキープアシスト部96によって車両10が制御されていないときの第1閾値Lth1より小さい第2閾値Lth2に置き換えて、対向車11に対する当該車両10の接触回避支援を行うようにしたので、接触回避支援処理が過剰に作動する状況を防止できる。
(もっと読む)
半自律型車両の遠隔操縦システム
【課題】所期の走行経路から外れて走行したときにも、所期の走行経路に容易に復帰できるようにする。
【解決手段】本発明は、測距部11,12、撮像部13及び走行機構Dを有し、自律走行と遠隔操縦可能な半自律型車両と、測距部11によって取得した画像を表示する表示部、及びその表示部に表示された画像に基づき半自律型車両の操縦コマンドを送出する遠隔操縦装置とを有する半自律型車両の遠隔操縦システムであって、操縦コマンドの受信が中断したか否かを判定するコマンド受信中断判定手段10aと、当該中断判定したときの受信中断位置情報を取得する中断位置情報取得手段10bと、自律走行を行わせる自律走行手段10cと、操縦コマンドの受信が再開したか否かを判定するコマンド受信再開判定手段10dと、受信再開位置情報を取得する再開位置情報取得手段10eと、復帰走行させる復帰手段10gとを半自律型車両に設けている。
(もっと読む)
半自律型無人車両の遠隔操縦システム
【課題】操縦者の意図した通りの高速走行を、安全に行うことができるようにする。
【解決手段】測距データに基づいて走行可能エリアを抽出するエリア抽出手段10aと、走行状態を取得する走行状態取得手段10bと、走行状態と走行可能エリアとに基づき、操縦限界を示す操縦限界情報を生成する操縦限界情報生成手段10cと、操縦限界情報を遠隔操縦装置に向けて送信する操縦限界情報送信手段10dと、操縦限界情報に基づき制限され、かつ、遠隔操縦装置から送出された操縦情報に従い、半自律型無人車両を走行させる自律走行手段10eとを半自律型無人車両に設けたこと、操縦限界情報を表示部に表示させる操縦限界情報表示手段と、操縦限界情報に基づき制限された操縦情報を生成する操縦情報生成手段と、電気通信回線を通じ、生成した操縦情報を半自律型無人車両に向けて送信する操縦情報送信手段とを遠隔操縦装置に設けている。
(もっと読む)
走行支援装置及び走行支援方法
【課題】車両を、現在地から所定の位置まで容易に、かつ、確実に自動で走行させることができるようにする。
【解決手段】車両を、基準点から仮想的に移動させ、各経路パターンの先端に設定された仮想移動点に置く仮想移動処理手段と、前記各仮想移動点を、新たな基準点とする基準点更新処理手段と、各仮想移動点において、車両を目標位置まで仮想的に移動させるための移動可能条件が成立するかどうかを判断する移動可能条件判断処理手段と、移動可能条件が成立する場合、経路を生成することができると判断する経路生成判断処理手段と、移動可能条件が成立しない場合、経路パターンを変更する経路パターン変更処理手段とを有する。前記移動可能条件が成立しない場合に前記経路パターンが変更されるので、経路を確実に生成することができる。
(もっと読む)
41 - 60 / 411
[ Back to top ]