
Fターム[3D232DA87]の内容
走行状態に応じる操向制御 (73,124) | 制御入力信号 (24,979) | 車外からの情報 (852) | GPS (411)
Fターム[3D232DA87]に分類される特許
21 - 40 / 411
運転支援装置
【課題】自車両を効率的に走行させるような運転支援を実現することができる運転支援装置を提供する。
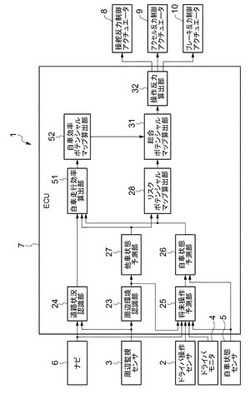
【解決手段】運転支援装置1のECU7は、自車両周辺の道路状況を認識する道路状況認識部24と、自車両の走行状態を予測する自車状態予測部26と、他車両の走行状態を予測する他車状態予測部27と、他車両に対する自車両のリスクポテンシャルマップを算出するリスクポテンシャルマップ算出部28と、自車両周辺の道路状況と自車両の走行状態と他車両の走行状態とに基づいて自車効率ポテンシャルマップを算出する自車効率ポテンシャルマップ算出部52と、リスクポテンシャルマップと自車効率ポテンシャルマップとに基づいて総合ポテンシャルマップを算出する総合ポテンシャルマップ算出部31と、総合ポテンシャルマップに基づいて操作反力を算出する操作反力算出部32とを有している。
(もっと読む)
摩擦円半径導出装置

【課題】走行路の路面勾配が変化しても、正確な摩擦円半径を得ることができる摩擦円半径導出装置を提供する。
【解決手段】軌跡生成演算部は、まず地図データから、車両が走行しようとする走行路の路面勾配の情報を取得し、路面勾配を考慮しない走行軌跡を生成する。そして、軌跡生成演算部は、路面勾配及び車速等の情報に基づいて、路面に対する車輪の接地荷重を算出し、その接地荷重に基づいて、車両の実走行時における車輪の摩擦円半径(タイヤ発生能力)を求め、その摩擦円半径に基づいて、路面勾配を考慮した走行軌跡を生成する。
(もっと読む)
車両制御装置
【課題】 特定の制御デバイスに可動範囲を超えて負荷が集中することがないよう、制御量を適切に設定する。
【解決手段】 本発明の車両制御装置(1)は、車両(10)の挙動を制御する複数のアクチュエータ(300、400、500、800)と、車両の目標運動状態に対応する目標状態量を設定し、車両の運動状態に対応する状態量が目標状態量となるようにアクチュエータの夫々の制御量を算出する制御量算出手段(100)と、複数のアクチュエータの夫々について重み係数を設定する係数設定手段(100)と、複数のアクチュエータの夫々の制御量に対して重み係数を適用した値に基づく評価関数を算出する評価関数算出手段(100)と、評価関数が所定の条件を満たす制御量を複数のアクチュエータの夫々の最適制御量として用いて、複数のアクチュエータを動作させるアクチュエータ制御手段(100)とを備える。
(もっと読む)
走行計画生成方法および走行計画生成装置
【課題】 車両の搭乗者の乗り心地を十分に向上させることができる走行計画生成方法および走行計画生成装置を提供する。
【解決手段】 走行制御ECU1における走行計画生成部10は、車両の車速に基づいて走行軌跡における最大横加速度および最大横ジャークを設定する。また、設定した最大横加速度および最大横ジャークに基づいて、(最大横加速度×π/2)/最大横ジャークから転舵時間を算出する。これらの最大横加速度、最大横ジャーク、および転舵時間に基づいて走行軌跡を生成する。
(もっと読む)
車両の操舵制御装置
【課題】荷物の積載状態に拘わらず、安定した制御性能を得ることが可能な車両の操舵制御装置の提供。
【解決手段】車両質量演算部41は、変位センサ36が検出した相対変位HFL,HFR,HRL,HRRを用いて車両の質量を算出する。ヨー慣性モーメント演算部43は、車両質量演算部41が算出した車両の質量からヨー慣性モーメントを算出する。状態フィードバックゲイン演算部44は、車両質量演算部41が算出した車両の質量と、ヨー慣性モーメント演算部43が算出したヨー慣性モーメントIとを用いて、目標操舵角を入力量とする操舵系の状態方程式を設定し、設定した状態方程式に対する評価関数を設定し、設定評価関数を最小とする状態フィードバックゲインを、LQ制御側に従って算出する。目標操舵角演算部45は、算出された状態フィードバックゲインKを用いて、車両を目標進路に従って走行させるための目標操舵角を算出する。
(もっと読む)
車両の挙動制御装置
【課題】各種状態制御量の制御を介して最終的に車両状態量を制御する各種のデバイスが故障した場合において、故障したデバイスに対応する状態制御量を中立点に復帰させるまでの過渡的過程における車両挙動を安定に維持する。
【解決手段】車両の挙動制御装置(100)は、ドライバによる操舵とは無関係に前輪の舵角を変化させることが可能な前輪舵角可変手段及びドライバによる操舵とは無関係に後輪の舵角を変化させることが可能な後輪舵角可変手段のうち一方が異常状態にあるか否かを判定する判定手段と、一方が異常状態にあると判定された場合に、この一方に対応する異常側車輪の舵角を中立点に戻す舵角戻し手段と、異常側車輪の舵角を中立点に戻す過程において、異常側車輪の舵角の戻し量に応じて、異常状態にない他方に対応する正常側車輪の舵角と左右制駆動力差とを制御する制御手段とを具備する。
(もっと読む)
車両用制御装置
【課題】車両の走行安定性を確保しつつ操縦性を制御し、操舵感を向上できる車両用制御装置を提供すること。
【解決手段】キャンバ角調整手段によりキャンバ角調整装置44が作動され後輪のキャンバ角が調整されて後輪にネガティブキャンバが付与される。ネガティブキャンバの付与により後輪に発生するキャンバスラストを利用して、車両の走行安定性を確保できる。また、キャンバ角調整手段により後輪にネガティブキャンバが付与される場合に、コーナリングフォース変更手段により前輪の等価コーナリングフォースが変更される。前輪の等価コーナリングフォースが変更されることにより、車両の操縦性の指標である操安キャパシティを変更することができ、車両の操縦性を制御できる。これにより、車両の走行安定性を確保しつつ操縦性を制御し、操舵感を向上できる。
(もっと読む)
車両挙動制御装置
【課題】複数の車両挙動制御装置のうち一の装置が故障した場合に、車両挙動の乱れを抑制しつつ他の装置へ切り替える。
【解決手段】車両挙動制御装置は、車両(10)の複数の車両挙動制御手段(400、500、600、800)から2以上を選択して車両の挙動を制御する挙動制御実行手段(100)と、選択された車両挙動制御手段のうち少なくとも一つの車両挙動制御手段が故障したか否かを判定する判定手段(100)と、故障したと判定された場合、故障したと判定された車両挙動制御手段と切り替え可能な予備挙動制御手段を選択する選択手段(100)と、予備挙動制御手段を用いた場合に、選択された車両挙動制御手段に係る制御量の変化量を演算する演算手段(100)と、演算された変化量に基づいて、故障したと判定された車両挙動制御手段と切り替えるべき予備挙動制御手段を決定する決定手段(100)と、を備える。
(もっと読む)
車両用操舵装置
【課題】省エネルギに優れ、且つ耐久性を向上させることができる車両用操舵装置を提供する。
【解決手段】据え切り操舵や荷役同時操舵等の非省エネ操舵が行われると、認知手段としての警告灯が点灯され(ステップS5)、非省エネ操舵であること運転者に認知させる。目標操舵反力Th*の操舵角速度比例成分のゲインk2を2倍に増加し(ステップS6)、目標操舵反力Th*を増加補正する。操舵反力の増加により、運転者に非省エネ操舵をしていることを確実に気付かせる。反力制御部が、運転者に非省エネ操舵をしていることを認知させる認知手段として機能する。
(もっと読む)
走行軌跡作成装置
【課題】見通しの悪いカーブ路を車両が走行する場合であっても、燃費の悪化を抑制することができる走行軌跡作成装置を提供する。
【解決手段】車両1の走行軌跡を作成する走行軌跡作成装置10において、カーブ路の入口部32から出口部34までの形状を認識するカーブ路形状認識手段11と、カーブ路内における、出口部34を見通す地点40を特定する出口部見通し地点特定手段12と、入口部32から出口部見通し地点40及び出口部見通し地点40から出口部34までの車両1の走行軌跡を作成する走行軌跡作成手段13と、を備えること、を特徴とする走行軌跡作成装置10。
(もっと読む)
車両制御装置
【課題】加速度に基づいて走行特性を変化させる場合の節度感を良好にすることのできる車両制御装置を提供する。
【解決手段】車両の加速度を検出もしくは推定するとともにその加速度に基づいて、前記車両の駆動力特性と変速特性と操舵特性と懸架特性との少なくともいずれか一つの特性を含む走行特性を変更するように構成された車両制御装置において、前記加速度の時間微分値であるジャークを算出するとともに、そのジャークの大小を判断する禁止判断閾値が前記走行特性に含まれる複数の特性毎に設定されており、前記ジャークがいずれかの特性についての前記禁止判断閾値を超えている場合(ステップS4)にはジャークが超えている禁止判断閾値についての前記特性の変更を禁止するように構成されている。
(もっと読む)
運転支援装置
【課題】旋回半径が変化するような場合であっても、適切な目標軌道を設定することが可能な運転支援装置を提供すること。
【解決手段】前方道路を含む所定エリアに設定した複数のポイントの運動に関して、車両の運転者の注視点への視線方向を軸として、その軸周りで回転する回転運動成分を算出し、回転運動成分の大きさが等しい等ポテンシャルラインを車両の目標軌道として設定する。これにより、車両が旋回しようとするカーブ路の旋回半径が途中で変化している場合であっても、その旋回半径の変化に応じて動的に回転運動成分の強度分布も変化するので、等ポテンシャルラインにより適切な目標軌道を設定することができる。
(もっと読む)
車両用挙動制御装置
【課題】カーブ進入時だけでなくカーブ内においてもドライバの危険感に合った減速制御を実行することができる車両用挙動制御装置を提供する。
【解決手段】自車がカーブ内に位置すると判定した場合には、減速制御において、接近離間状態評価指標KdBに基づいた第1修正目標相対速度算出式を適正道路境界距離とカーブ内適性道路境界距離との差分をもとに修正した第2修正目標相対速度算出式を用いて第2修正目標相対速度を算出する。
(もっと読む)
操舵制御装置
【課題】道路状態や走行状態に応じた目標舵角を設定し、この目標舵角に近づくように操舵反力トルクの制御や、自動操舵の制御時、ドライバの操舵による負担を低減する操舵制御装置を提供する。
【解決手段】操向輪の転舵角と走行路形状に応じた転舵角である目標転舵角との差が小さくなる方向に、操向輪の転舵角が変化しているときには、操舵量に対して転舵量が大きくなるようにする。
(もっと読む)
車両の走行制御装置
【課題】車両の目標軌跡や実軌跡を求めるための車外情報の取得を要することなく、車両の軌跡が運転者の希望に則し且つ走行路に適合する目標軌跡になるよう操舵輪の舵角を制御する。
【解決手段】舵角可変装置14又はバイワイヤ式の操舵装置96と、走行路の情報を取得する装置58とを備えた車両の走行制御装置。車両の軌跡の制御を開始又は更新すべきと判定したときには(S200、300)、その時点に於ける運転者の操舵操作量及び車速に基づいて車両が目標進行方向にて目標到達位置に到達するに必要な目標軌跡に沿って車両を走行させるための操舵輪の目標舵角を演算する(S500)。目標到達位置が走行路の所定の範囲内にないときには目標到達位置が走行路の所定の範囲内になるよう目標舵角を補正する。そして目標舵角に基づいて操舵輪の舵角を制御する(S600)。
(もっと読む)
自動車の運転者を支援するための方法
【課題】従来技術の欠点を改善すること。
【解決手段】この課題は、自動車(11)の運転者を走行操作時に支援するための方法において、
(a)自動車(11)の周囲を検出し、前記自動車(11)の周囲の二次元図を表示し、
(b)前記自動車(11)の所期の最終位置(45)が運転者によって入力され、該最終位置(45)を前記二次元図にマークし、
(c)前記最終位置(45)に到達するための軌道(49)を決定し、該軌道(49)に追従するための指示を運転者に出力するか、または、自動車(11)を前記軌道(49)に沿って前記最終位置(45)へと操作する自動的な走行操作を実施する、
ことを特徴とする方法によって解決される。
(もっと読む)
スライディングモード制御装置及び車両の自動操舵制御装置
【課題】車両の自動操舵制御に適用した場合に、道路の変化に応じた最適な追従性能を得ることが可能なスライディングモード制御装置の提供。
【解決手段】スライディングモード制御装置は、制御対象の状態量yと状態量の時間変化率y’との間に非線形の関係が成立するように切り換え超平面σnを設定し、設定した切り換え超平面σnに制御対象の状態量y及び状態量の時間変化率y’を収束させる。
(もっと読む)
スライディングモード制御装置及び車両の自動操舵制御装置
【課題】切り換え超平面への収束性を良好に維持しつつ、チャタリング現象を的確に低減することが可能なスライディングモード制御装置の提供。
【解決手段】スライディングモード制御装置は、制御対象の状態量yと状態量の時間変化率y’との間に非線形の関係が成立するように切り換え超平面σnを設定し、設定した切り換え超平面σnに状態量y及び状態量の時間変化率y’を収束させる。また、初期状態の制御対象の状態量y及び状態量の時間変化率y’の収束軌跡の傾きと切り換え超平面σnの傾きとの差が大きいほど値が大きくなるように境界層φを設定し、状態量y及び状態量の時間変化率y’を切り換え超平面σnに到達させるための非線形入力θnlを、境界層φにおいて減少させる。
(もっと読む)
ヨーレート検出装置
【課題】車両の走行状態にかかわらずにヨーレートセンサの較正を適切に行なう。
【解決手段】ヨーレート検出装置10は、車両の位置が所定精度以上で車両のヨーレートを算出可能なヨーレート算出範囲内に存在するか否かを判定するヨーレート算出範囲判定部23aと、車両の現在位置がヨーレート算出範囲内に存在するとヨーレート算出範囲判定部23aにより判定された場合に、車両の位置と道路データ記憶部22に記憶されている曲率情報とに基づき、車両のヨーレートを算出して算出値を出力するヨーレート算出部31と、ヨーレート算出部31から出力されたヨーレートの算出値と、ヨーレートセンサ11から出力されるヨーレート(検出値)Ysとの差に基づき、ヨーレート(検出値)Ysを補正し、該補正により得られる算出値を出力するヨーレートセンサ補正部38とを備える。
(もっと読む)
狭路走行支援装置、狭路走行支援方法
【課題】狭路にて右左折をする際に、運転者に対して適切なステアリング操作を直感的に促すことである。
【解決手段】走路境界までの距離yL及びyR、並びに右左折路までの距離yTに応じて、第一の閾値と、この第一の閾値よりも小さな第二の閾値とを設定する(S607、S608)。そして、右左折時旋回内側の走路境界までの距離yiが第一の閾値th1よりも短いときには(S609の判定が“Yes”)、支援トルクに対して制御介入し、走路境界への接近を抑制するための回避操作を運転者に促す(S612)。一方、右左折時旋回内側の走路境界までの距離yiが第二の閾値th2よりも短いときには(S610の判定が“No”)、支援トルクに対して制御介入し、走路境界からの離間を促進するための回避操作を運転者に促す(S613)。
(もっと読む)
21 - 40 / 411
[ Back to top ]