
Fターム[3D232DA99]の内容
走行状態に応じる操向制御 (73,124) | 制御入力信号 (24,979) | その他 (332)
Fターム[3D232DA99]に分類される特許
1 - 20 / 332
電動パワーステアリング装置
【課題】トルクセンサ、または電流センサの異常時においても、継続して安定したステアリング操作を行なうことのできる電動パワーステアリング装置を提供することにある。
【解決手段】ステアリングの操舵トルクを検出するトルクセンサと、操舵軸に加わる軸力を検出する軸力センサと、モータに流れる実電流を検出する電流センサとを備え、更に、トルクセンサ、軸力センサ及び電流センサの異常を検出する異常検出手段を有する。そして、上記異常検出手段により、軸力センサが正常、且つトルクセンサが異常の場合には、軸力センサにて、トルクセンサの値を推定する。また、軸力センサが正常、且つ電流センサが異常の場合には、軸力センサ及びトルクセンサにて、電流センサの値を推定することができる構成とした。
(もっと読む)
カウンタウエイト台車制御装置

【課題】カウンタウエイト台車の旋回走行時に車輪の旋回半径が大きくなることを抑制し、クレーンの作業効率を向上させる。
【解決手段】カウンタウエイト台車制御装置1は、車輪40の操舵角度θを制御する操舵アクチュエータ50と、操舵アクチュエータ50を制御する制御手段80と、を備える。制御手段80は、上部本体20の旋回方向を判別可能な信号が入力される旋回方向入力手段81を備える。制御手段80は、平面視において、車輪40の位置における車輪40の旋回軌道Cの接線L1よりも車輪40(の前後方向前側)が内側を向くように操舵アクチュエータ50を制御する。
(もっと読む)
車線維持支援装置
【課題】 車線維持支援制御時にドライバが操舵力を緩めたときのドライバの違和感を抑制する車線維持支援装置を提供すること。
【解決手段】 走行車線に対する自車両の横変位に応じて操舵反力アクチュエータにより発生させる操舵反力を演算し、付加反力指令値の方向と操舵の方向との比較に基づき、横変位と操舵速度に応じて付加操舵反力指令値を減少させる補正値を演算するようにした。
(もっと読む)
電動パワーステアリング装置の制御装置
【課題】スタックの解消に対してより高く貢献することのできる電動パワーステアリング装置の制御装置を提供する。
【解決手段】電動パワーステアリング装置の制御装置は、アシストモータの電流制御により転舵輪の転舵角θtを変更する自動操舵制御を行なう。そして、自動操舵制御により転舵輪のグリップが発生した転舵角θtを検出する。
(もっと読む)
車両の操舵抵抗付与装置
【課題】操舵の切り始めと戻し始めの微小操舵域において良好な操舵感が得られるとともに、ステアリングの剛性感を高めて高速走行時の安心感の向上を図ることができる車両の操舵抵抗付与装置を提供すること。
【解決手段】筒状のステアリングコラム1内に挿通する回転可能なステアリングシャフト2の回転に抵抗力を付与する抵抗付与手段5を設け、該抵抗付与手段5によって付与される抵抗力を車速に応じて変更する車両の操舵抵抗付与装置において、前記抵抗付与手段5をステアリングホイール4の近傍に配置するとともに、操舵角に基づいて算出される操舵速度の変化によってステアリングの切り始めを検知し、ステアリングの切り始め領域において前記抵抗付与手段5によって付与される抵抗力を他の領域において付与される抵抗力よりも大きく設定する。
(もっと読む)
車両の位置姿勢測定装置
【課題】車両の位置姿勢を精度良く測定する車両の位置姿勢測定装置を提供する。
【解決手段】前輪を操舵する車両の位置および姿勢を検出するための車両の位置姿勢測定装置であって、ステアリング角(θ)を検出するステアリング角検出手段(1)と、車両の前後左右四輪の車輪速(PFl,PFr,PRl,PRr)を検出する車輪速検出手段(2−5)と、前記ステアリング角検出手段からの出力に基づいて実舵角(δFl,δFr)を演算する実舵角演算手段(6)と、前記実舵角と前記車輪速に基づきリアトレッドおよび後輪車輪半径のそれぞれの推定値(T†R,r†Rl,r†Rr)を演算するトレッド・車輪半径推定手段(7)と、前記推定値と後輪の前記車輪速に基づき車両の位置(x,y)および姿勢(γ)を演算する車両位置姿勢演算手段(8)と、を備え、任意の慣性座標系に対する車両の位置および姿勢を測定する。
(もっと読む)
電動ステアリング装置
【課題】運転者にとって期待される安定した修正操舵の実施を可能とする電動ステアリング装置を提供する。
【解決手段】操舵トルクTに基づいて制御装置200Aにより制御されて操舵補助力を発生する電動機を11備えた電動パワーステアリング装置において、操向ハンドルに設けられて、運転者の操作により電気信号を出力する操作スイッチ2aL,2aRと、操作スイッチ2aL,2aRからの電気信号に応じて電動機11を駆動する電流を付加する付加電流値波形を演算して出力する付加電流演算部300Aと、を備えている。付加電流演算部300Aは、中立位置近傍の所定の操舵角の範囲において操作スイッチ2aL,2aRが操作されたことを検出したとき、修正操舵のための第1電流と、その修正操舵に対する戻し操舵のための第2電流を、車両の走行状態に応じて生成し、付加電流値IAdとして出力する。
(もっと読む)
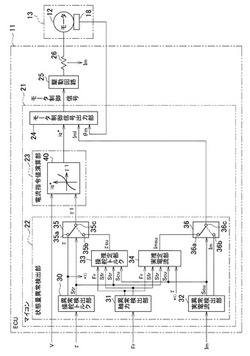
電動パワーステアリング装置
【課題】エンジンの始動がなくても好適に起動できる電動パワーステアリング装置を提供することを課題とする。
【解決手段】ステアリング機構に操舵補助力を与える電動機4と、電動機4を駆動する電動機駆動回路23と、電動機駆動回路23を制御する操舵制御ECU130と、を備える電動パワーステアリング装置とする。そして、操舵制御ECU130は、CAN130aを介して取得する完爆情報ES、走行用モータ可動情報MS、車速情報VS、および車速演算値情報TRSに基づいて電動機駆動回路23を始動させ、CAN130aに異常が発生しているときには、CAN130aと異なる信号線を介して入力されるトルク信号TS、角度信号θSに基づいて電動機駆動回路23を始動させることを特徴とする。
(もっと読む)
後輪トー角制御装置
【課題】左右の後輪のトー角を個々に制御する後輪トー角制御装置において、左右の後輪にコーナリングフォースの偏差が生じた場合にも車両の直進安定性を維持できるようにする。
【解決手段】後輪トー角制御装置10を、車両前後方向の加速度に基づいて左右の後輪5のトー角を共にトーイン若しくは共にトーアウトに制御するECU12と、左右の後輪5のコーナリングフォースを検出するための後輪空気圧センサ13とを備えるものとし、ECU12を、コーナリングパワー判定部26により左右の後輪5にコーナリングパワーの偏差が検出された場合、コーナリングフォース補正量算出部27により算出されたコーナリングフォース補正量(偏差)を低減するように、目標トー角補正部29により左右の後輪5のうち少なくとも一方の目標トー角θtを補正するように構成する。
(もっと読む)
車両、自動駐車支援設備および自動駐車システム
【課題】天候や時間帯に関わらず車両を駐車スペースに精度よく誘導する。
【解決手段】車両の制御装置180は、駐車スペースに車両を自動駐車させる自動駐車制御を実行する自動駐車制御部181を含む。駐車スペースの周囲には、入口側が開口され、入口側から奥に向かって左右の間隔が狭くなるように配置されるガイド棒が設けられる。自動駐車制御部181は、当接判定部181Bと、ステアリング制御部181Cとを含む。当接判定部181Bは、自動駐車制御の実行中、タイヤ空気圧情報に基づいて各タイヤがガイド棒に当接したか否かを判定する。ステアリング制御部181Cは、当接判定部181Bによっていずれかのタイヤがガイド棒へ当接したと判定された場合、そのタイヤとガイド棒との当接を回避するように、ステアリングの自動制御を行なう。
(もっと読む)
電動パワーステアリング装置
【課題】積載状態により車両重量が変化しても操舵フィーリングを低下させない電動パワーステアリング装置を提供する。
【解決手段】車両重量Wとバッテリ100のバッテリ電圧PIGは、電流制限値決定部24に入力される。電流制限値決定部24は、車両重量−最大出力制限値マップに基づいて、入力された車両重量Wに対応したモータ駆動電流の最大出力制限値を取得し、バッテリ電圧−出力電流制限値マップ上の出力電流制限値を変更する。そして、電流制限値決定部24は、上記バッテリ電圧−出力電流制限値マップに基づいて、検出されたバッテリ電圧PIGに対応する出力電流制限値Iul,Ivl,Iwlを決定し、モータ駆動電流制限手段23に出力する。
(もっと読む)
パワーステアリング装置
【課題】運転者の操舵負荷の増大を抑制することができるパワーステアリング装置を提供する。
【解決手段】操舵軸に生じる操舵トルクの変化に応じてインピーダンスが変化するコイル6a、6bに発振部(MPU4)から出力された交流電圧(クロック信号〜励磁信号)を印加し、コイル6a、6bを経由した交流電圧(トルク信号)に基づき操舵トルクを検出するトルク検出手段(トルク検出回路1)を備えたパワーステアリング装置において、コイル6a、6bを経由した交流電圧(トルク信号)の位相ズレの程度を判断する回路(比較回路11、アシスト継続可否判断回路12)を備え、位相ズレの程度が小さいと判断したときは操舵アシストを継続する。
(もっと読む)
運転者状態推定装置
【課題】 運転者の注意状態を精度よく判定することを可能とした運転操作状態推定装置を提供する。
【解決手段】 車両の走行状態と運転者の操作状態に基づいて、前方注視点における目標コースからのずれである前方偏差εと修正操舵角δとの関係を途中1カ所で傾きの変化を許容する屈曲線(図においては、ε≧0では、δ=k1×ε、ε<0では、δ=k2×ε)で近似し、この修正操舵角と実操舵角との関係から運転者の意識状態を判定する。
(もっと読む)
電動ポンプ装置
【課題】起動してから素早く必要な油圧を発生させることができるとともに、安定して油圧を供給することのできる電動ポンプ装置を提供する。
【解決手段】マイコン22は、モータ13の回転状態を維持することにより必要な油圧が変速機構に供給される安定状態であるか否かを判定し、安定状態である場合に電流フィードバック制御のゲインKを、起動状態で設定される高応答ゲインよりも小さな低応答ゲインに変更するPIゲイン設定部51を備えた。
(もっと読む)
運転支援装置
【課題】自車両を効率的に走行させるような運転支援を実現することができる運転支援装置を提供する。
【解決手段】運転支援装置1のECU7は、自車両周辺の道路状況を認識する道路状況認識部24と、自車両の走行状態を予測する自車状態予測部26と、他車両の走行状態を予測する他車状態予測部27と、他車両に対する自車両のリスクポテンシャルマップを算出するリスクポテンシャルマップ算出部28と、自車両周辺の道路状況と自車両の走行状態と他車両の走行状態とに基づいて自車効率ポテンシャルマップを算出する自車効率ポテンシャルマップ算出部52と、リスクポテンシャルマップと自車効率ポテンシャルマップとに基づいて総合ポテンシャルマップを算出する総合ポテンシャルマップ算出部31と、総合ポテンシャルマップに基づいて操作反力を算出する操作反力算出部32とを有している。
(もっと読む)
操舵装置
【課題】運転者の知覚特性に適合した操舵制御を行う。
【解決手段】操舵装置は、運転者が操舵ハンドルを操作する操作量に基づいて、車両が走行する道路の環境を特定する特定手段と、特定された環境に基づいて、操舵ハンドルに発生させる操舵減衰力を制御する制御手段とを備える。ダンピング制御部130は、基本ダンピング制御部131によって設定した基本ダンピングトルクTbと、調整ゲイン設定部1341によって道幅判定値に応じて設定した調整ゲインGaとの積をダンピングトルクとして設定する。
(もっと読む)
駐車場の自動駐車システム
【課題】車両を、駐車開始位置から車両駐車スペースまで自動運転させて駐車できるようにする自動駐車システムの提供である。
【解決手段】車両8に搭載されたカメラ12が撮影した映像が、自動駐車センタ9の画像処理コンピュータ15に無線送信され、画像処理コンピュータ15は、カメラ12の映像から車両画像22と駐車場画像26とを作成し、ディスプレイ21に表示する。オペレータ25が模擬ステアリング23と模擬アクセルレバー24とを操作してディスプレイ21の車両画像22を駐車スペース画像27に駐車させたときのステアリング角度の変位とアクセルの変位とを車両8の自動駐車ECU13に無線送信し、車両8を駐車開始位置Pから駐車スペース5cまで自動運転させる。
(もっと読む)
MDPSの自動フルターン作動制御方法
【課題】Uターンまたはフルターン時に操舵力を最小にすることができ、自動フルターンによってユーザの便宜性を増大することができるMDPSの自動フルターン作動制御方法を提供する。
【解決手段】本発明のMDPSの自動フルターン作動制御方法は、MDPSの自動フルターン作動条件を満たすか否かを判断する段階、MDPSの自動フルターン作動条件を満たす場合、MDPSをフルターンで操向する段階、MDPSの自動フルターン解除条件を満たすか否かを判断する段階、およびMDPSの自動フルターン解除条件を満たす場合、MDPSの自動フルターンを解除する段階を含み、MDPSの自動フルターン作動条件を満たすか否かを判断する段階は、MDPSの作動が正常であるかを判断する段階を含むことを特徴とする。
(もっと読む)
パワーステアリング装置
【課題】アイドルストップ機能を有する自動車に搭載されるパワーステアリング装置において、電動モータが発電状態となったときに発生する起電力から電動モータ駆動用のインバータを保護しつつ、アイドルストップ中の消費電力を低減する。
【解決手段】アイドルストップ中であるか否かを判定するアイドルストップ状態判定手段(ステップS106,107)と、上記電動モータが発電状態にあるか否かを判定する発電状態判定手段(ステップS102)と、を設け、アイドルストップ状態判定手段がアイドルストップ中でないと判定している場合、少なくとも上記電動モータが発電状態にあると上記発電状態判定手段が判定しているときに弱め界磁制御を行う一方、上記アイドルストップ状態判定手段がエンジンの自動停止中であると判定している場合には弱め界磁制御を停止する。
(もっと読む)
車両用操舵装置
【課題】旋回性に優れ且つ車両姿勢が安定した車両用操舵装置を提供すること。
【解決手段】車両の幅方向Xに延びる第1の被動ラック9Aと第2の被動ラック9Bに、共通の駆動ピニオン10が噛み合う。トレッド幅変更アクチュエータ11が駆動ピニオン10を駆動すると、第1および第1の被動ラック9A,9Bが互いに反対方向に移動する。第1および第2の転舵輪3A,3Bをそれぞれ転舵する第1および第2の転舵アクチュエータ4A,4Bが、それぞれ、第1の被動ラック9Aおよび第2の被動ラック9Bと同行移動する。転舵角センサにて検出された転舵角等に応じて、トレッド幅変更アクチュエータ11を駆動制御し、トレッド幅WTを変更する。
(もっと読む)
1 - 20 / 332
[ Back to top ]