
Fターム[3D232EB01]の内容
走行状態に応じる操向制御 (73,124) | 制御対象(制御量) (5,762) | 操舵方向、位相 (137)
Fターム[3D232EB01]の下位に属するFターム
特性のモード切替 (33)
Fターム[3D232EB01]に分類される特許
1 - 20 / 104
車両のパワーステアリング制御装置
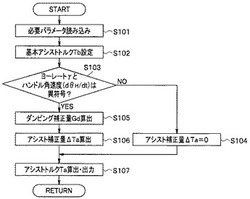
【課題】パワーステアリングによりダンピング補正を精度良く適切に行って、スッキリとした操舵フィーリングを維持し、たとえ、比較的素早い切り返し操舵時等であってもドライバがしっかりステアリングホイールを握らなくても安定感のある操舵フィーリングを実現する。
【解決手段】車速Vと操舵トルクTsを基に基本アシストトルクTbを設定し、ヨーレートγとハンドル角速度(dθH/dt)とが同符号の場合は、アシスト補正量ΔTaを0とし、ヨーレートγとハンドル角速度(dθH/dt)とが異符号の場合は、ヨーレートの絶対値|γ|に基づいてダンピング補正量Gdを算出してこのダンピング補正量Gdとハンドル角速度(dθH/dt)とに基づいてアシスト補正量ΔTaを算出し、アシスト補正量ΔTaで基本アシストトルクTbを補正してアシストトルクTaとする。
(もっと読む)
車両用操舵装置

【課題】代替モータ回転角の検出に用いる回転角センサの分解能をモータ回転角に換算した値が90°〜180°の範囲内にある場合であっても、安定的に代替モータ回転角を用いたモータ制御を実行することのできる車両用操舵装置を提供すること。
【解決手段】マイコンは、モータ回転角センサにより検出されるモータ回転角に異常が検出された場合には、当該モータ回転角に代えて、ステアリングセンサの検出値に基づく代替モータ回転角を用いた代替制御を実行する。そして、マイコンは、代替制御に基づき換算分解能Δθ0に対応する位相遅れが生じたq軸電流指令値Iq*のq軸電流成分(第1成分Iq1)を打ち消すd軸電流指令値Id*を演算する。
(もっと読む)
車両および車両制御プログラム
【課題】搭乗者の進行したい方向を正確に汲み取りながら走行予定軌道を選択して自動走行を行うことができる車両および車両制御プログラムを提供すること。
【解決手段】第3車両位置予測処理(S107)によって、ステアリングホイール13の回転角速度Δδを取得してステアリングホイール13の操舵角を算出し、そのステアリングホイール13の操舵角から前輪2FL,2FRへ付与される操舵角を算出して、その前輪2FL,2FRへ付与される操舵角と車両速度とに基づいて車両1のヨーレートを推定し、その推定したヨーレートから所定時間後の車両位置を予測する。これにより、搭乗者の進行したい方向を、所定時間後の車両位置まで特定して把握しているので、予測された車両位置に基づいて走行軌道を選択することによって、搭乗者の進行した方向を正確に汲み取りながら走行予定軌道を選択して、自動走行を行うことができる。
(もっと読む)
電気自動車
【課題】 電気制御式の操舵機構の異常や、左右の駆動輪のモータ駆動系の異常に対し、操舵機構と左右個別のモータとによる旋回走行の相互補完機能を利用し、上記異常の発生時に、ドライバーの意図した方向に進めるように制御できる電気自動車を提供する。
【解決手段】 左右の駆動輪2,2を駆動する独立したモータ6,6と、転舵機構11に機械的に連結されていないステアリングホイール14により操舵する操舵機構12を備える電気自動車に適用する。異常時補完手段37として、操舵系の異常の検出によって、その異常による転舵不足を補うように、左右駆動輪2,2のトルク指令の配分を変更する異常対応トルク配分変更部39を設ける。また、車輪駆動系の異常検出によって、その異常による左右両駆動輪2,2の駆動バランスの変化量を補うように、操舵機構12の転舵用モータ13の回転量を変更する異常対応転舵量変更部38を設ける。
(もっと読む)
操舵力制御装置
【課題】最小限の構成による簡素な構成で、車両姿勢が不安定となったときに適切に操舵補助力を付加し、ステアリング操作による車両の姿勢の安定化を促進させることのできる操舵力制御装置を提供すること。
【解決手段】電動パワーステアリング(10)を備えた車両(1)において、前輪(2L,2R)の左右車輪速差、または後輪(4L,4R)の左右車輪速差が所定車輪速差αより大、または当該左右車輪速差の変化率が所定変化率βより大であるような場合に(S3)、所定時間の間(S9)低車輪速側に操舵補助力を付加する。
(もっと読む)
ステアバイワイヤシステム
【課題】車両走行中はステアリングホイールの操作角と操舵輪の操舵角とを整合させず、停車中にステアリングホイールの操作角と操舵輪の操舵角とを整合させる。
【解決手段】ステアリングホイールと操舵輪とが機械的に切り離され、ステアリングホイールの操作角を検出する操作角検出手段と、操舵輪の操舵角を検出する操舵角検出手段とを備え、ステアバイワイヤシステム起動時、操作角検出手段により検出された操作角と操舵角検出手段により検出された操舵角とにずれが生じている場合、操作角と操舵角とを整合させる制御手段を備えるステアバイワイヤシステムにおいて、車両速度を検出する車速検出手段を備え、制御手段は、ステアバイワイヤシステム起動後、前記車速検出手段により検出された車両速度が略0になった時に、操作角と操舵角とを整合させる。
(もっと読む)
自動運転車両制御装置
【課題】自動運転から手動運転への自動での切り替えを可能とする自動運転車両制御装置を提供することを課題とする。
【解決手段】ドライバがオーバーライドした場合に自動運転から手動運転に切り替える自動運転車両を制御する自動運転車両制御装置1であって、自動運転の目標進路を生成する目標進路生成手段30と、自動運転の目標進路又はドライバによる運転操作に基づいて車両を制御する車両制御手段32と、実際の車両進路と自動運転の目標進路とを比較する進路比較手段31と、ドライバのオーバーライドを検出するオーバーライド検出手段12と、手動運転時に進路比較手段31で比較した進路の差が閾値未満でありかつオーバーライド検出手段12でドライバのオーバーライドが検出されていない場合に手動運転から自動運転に切り替える切替手段32とを備えることを特徴とする。
(もっと読む)
自動車の運転者を支援するための方法
【課題】従来技術の欠点を改善すること。
【解決手段】この課題は、自動車(11)の運転者を走行操作時に支援するための方法において、
(a)自動車(11)の周囲を検出し、前記自動車(11)の周囲の二次元図を表示し、
(b)前記自動車(11)の所期の最終位置(45)が運転者によって入力され、該最終位置(45)を前記二次元図にマークし、
(c)前記最終位置(45)に到達するための軌道(49)を決定し、該軌道(49)に追従するための指示を運転者に出力するか、または、自動車(11)を前記軌道(49)に沿って前記最終位置(45)へと操作する自動的な走行操作を実施する、
ことを特徴とする方法によって解決される。
(もっと読む)
対象物リスク予測装置
【課題】それぞれの他者(障害物)にインタラクション(相互干渉)の影響があることを考慮して、正確な移動変化予測に伴うリスク予測を行うことができる対象物リスク予測装置を提供することを課題とする。
【解決手段】本実施形態では、複数の他者(障害物)同士の将来予測位置(第1予測進路)が干渉(接近)する場合(複数の他者同士の将来予測位置が干渉するエリアを検出した場合)には、当該干渉の影響で当該将来予測位置から変更され得る複数の他者のそれぞれの将来予測位置(回避経路、第2予測進路)を算出し、当該将来予測位置に応じたリスク値を設定する。
(もっと読む)
車両の制御装置
【課題】車両の旋回挙動を規定するヨーレート及び車体スリップ角を所望の値に制御する。
【解決手段】前輪及び後輪の各々について左右制駆動力差を生じさせることが可能な制駆動力可変手段を備えた車両を制御する装置は、前記車両の目標運動状態を規定するヨーレート及び車体スリップ角を少なくとも含む車両状態量の目標値を設定する設定手段と、予め設定された、前記車両状態量と前記各々における左右制駆動力差を少なくとも含む状態制御量との相対関係を規定する車両運動モデルに基づいて、前記設定された車両状態量の目標値に対応する前記状態制御量の目標値を決定する決定手段と、前記各々における左右制駆動力差が前記決定された目標値となるように前記制駆動力可変手段を制御する制御手段とを具備する。
(もっと読む)
モータ制御装置
【課題】バッテリなど一定電力を供給する車両のシステムにおいて、モータに過大な電流供給があった場合、モータ電流指令値に制限をかけるとモータ電流の制限に遅れが発生し、電流制御の応答性に課題があった。
【解決手段】モータ1に与える電流指令値とモータ電流とに基づいてモータを駆動するためのモータ電圧指令値を算出するモータ電圧指令値演算手段12と、モータに供給する電源電圧を検出する電源電圧検出手段7と、電源電圧とモータ回転速度からモータ電圧指令制限値を算出するモータ電圧指令制限値算出手段13と、モータ電圧指令制限値によって、モータ電圧指令値を制限するモータ電圧指令値制限手段14とを備え、モータ電圧指令値に制限をかけることにより電流制御の応答性を早めた。
(もっと読む)
電動パワーステアリング装置
【課題】アシスト操舵状態の切り替わりに生じるヒステリシスの減少を防ぐことができる電動パワーステアリング装置を提供する。
【解決手段】操舵トルクTを検出する操舵トルク検出手段と、操舵角検出手段と、操舵トルク検出手段からの信号TSによってアシストトルクTMを発生させる電動機と、ステアリングハンドルの中点位置から遠ざかる方向に切る往き状態か、ステアリングハンドルの中点位置に戻す方向に切る戻り状態かを判定する往き戻り状態検出部230と、を備えた電動パワーステアリング装置であって、往き戻り状態検出部230で検出された状態に基づいて、往き状態または戻り状態のアシスト開始の操舵トルク検出手段からの値Tを操舵角θに応じてオフセットさせるオフセット量設定手段220を備えた。
(もっと読む)
車両用運転支援装置
【課題】車両の前進時に、内輪差による捲き込みを回避するように運転者を十分に支援すること。
【解決手段】車両前方を撮像する撮像手段と、前記撮像手段によって撮像された画像を表示し、該表示された画像上でユーザーが車両前方の回避ポイントを設定可能な画像表示・回避ポイント設定手段と、運転者に情報提供可能な情報提供手段と、前記運転者が前記回避ポイント側に規定量のステアリング操作を行なっても前記回避ポイントを回避して走行可能なステアリング操作許容ポイントを算出し、車両が該算出したステアリング操作開始許容ポイントに至ると所定の情報提供を行なうように前記情報提供手段を制御する制御手段と、を備える車両用運転支援装置。
(もっと読む)
電動パワーステアリング装置、電動パワーステアリング装置の制御方法およびプログラム
【課題】トルクセンサの一部に異常が発生した場合であっても、代替の操舵トルクに基づいて操舵アシストトルクを発生させる技術を提供する。
【解決手段】電動モータに供給する目標電流を操舵トルクに基づいて算出する目標電流算出部20と、操舵トルクに応じて互いに逆方向にインダクタンスが変化する第1コイルおよび第2コイルと、第1コイル,第2コイルのインダクタンス変化に基づく第1電圧と第2電圧との差に応じた電圧VTをハードウェアにより出力するトルク検出回路250と、両電圧の差に応じた電圧VTFSをソフトウェアにより演算する電圧演算部351と、電圧VTと電圧VTFSとに基づいて電圧VTが正常であるか否かを診断し、電圧VTは正常である場合には電圧VTを、異常である場合には電圧VTFSを、目標電流算出部20が算出するのに基づく操舵トルクに関する情報として設定する電圧値設定部352とを備える。
(もっと読む)
電動パワーステアリング装置
【課題】構造を複雑にすることなくラトル音の発生を抑制することができる電動パワーステアリング装置を提供する。
【解決手段】不感帯域マップが基本アシスト特性から右アシスト方向にオフセットしたアシスト特性、及び、左アシスト方向にオフセットしたアシスト特性を併有するECUにより、モータに微小な回転トルクを生じさせ、駆動ギヤ及び従動ギヤ間でバックラッシュがない状態とする。この状態では、路面から逆入力があっても、両ギヤは互いに当接した状態を維持することができるので、ラトル音の発生を抑制することができる。また、ECUは、左右いずれか一方の操舵トルクの絶対値が増大して所定値(T0,T3の絶対値)より大きくなった後、当該所定値より小さい状態に戻るときは、アシスト方向が反転する方のアシスト特性を選択することにより、違和感の無い滑らかな操舵感を実現する。
(もっと読む)
車両の制御装置
【課題】後輪操舵制御装置とアクティブサスペンション装置とを備えた車両がダブルレーンチェンジ等の速い切り返しが為される際に発生するロールの違和感を抑制する制御装置を提供する。
【解決手段】本発明は、後輪操舵制御装置10とアクティブサスペンション装置6,7とを備えた車両の制御装置12である。本制御装置は、前記車両の横加速度Gy、前輪舵角、後輪舵角、ロール角を含む運動状態量を検出する運動状態量検出手段と、前記横加速度と前記前輪舵角との相関を算出して、予め設定された標準値と比較し、横加速度修正量を算出する横加速度修正量算出手段125と、前記横加速度修正量と前記横加速度とからロール角制御量を算出するロール角制御量算出手段124と、前記ロール角制御量と前記ロール角とから前記アクティブサスペンションのロール角制御量を算出するロール姿勢制御手段126とを備えることを特徴とする。
(もっと読む)
車両制御装置
【課題】四輪操舵装置を備える車両を、操舵時に進行方向に対して好適に平行移動させる。
【解決手段】車両10は、前輪を操舵可能な前輪側操舵機構250,260と、操舵される前輪の舵角に対し、走行状態に応じて異なる舵角をとるように後輪を操舵可能な後輪側操舵機構270,280とを有する。この車両を制御する車両制御装置100は、予め設定された車両のヨー角を特定するための第1関数から、ヨー角を零とした場合における前輪の舵角と後輪の舵角との関係を表す第2関数に含まれる時定数τ1,τ2の値を、決定する時定数決定手段と、決定された値を時定数に代入した第2関数を用い、ヨー角を零とした場合における、操舵される前輪の舵角σfに対し後輪がとるべき舵角たる後輪目標舵角σrを決定する目標舵角決定手段とを備える。
(もっと読む)
摩擦状態推定装置
【課題】 直進走行時や急旋回走行時等における誤推定を抑制した摩擦状態推定装置を提供する。
【解決手段】 ATTS−ECU16は、ステップS21で実ヨーレイトγrが所定の直進判定閾値γthより小さいか否かを判定し、この判定がYesであればステップS22で直進走行フラグFsrを1とする。ATTS−ECU16は、ステップS31で直進走行フラグFsrが1であるか否かを判定し、この判定がYesであればステップS32で路面μの初期値μintを今回値μnとして出力する。初期値μintは、標準タイヤを装着した車両が標準路面(乾燥アスファルト路面等)を走行する際の路面μであり、例えば「0.7」程度に設定されている。
(もっと読む)
車両運動制御システム
【課題】旋回運動の安定化制御の干渉を防止できる車両運動制御システムを低コストで提供することを目的とする。
【解決手段】車両運動制御システムは、駆動輪である左右前輪に異なる駆動力を配分することにより車両にヨーモーメントを発生させる左右駆動力配分装置と、車両の転舵輪である前輪の向きを変更する操向ハンドルの操作角θHに応じて後輪のトー角を変更する後輪トー角制御装置と、を少なくとも備える。左右駆動力配分装置は左右駆動力配分制御ECU37を有し、フィードフォワード部71とフィードバック制御部73と駆動力配分量制御状態モニタ部75を有している。駆動力配分量制御状態モニタ部75が、車両の旋回方向のヨーレイトを増加させる方向に作動しているときには、後輪トー角制御ECU36における第2補正部67は、操向ハンドルの操作角θHの向きと逆相に後輪のトー角を制御しない。
(もっと読む)
車線維持支援装置及び車線維持支援方法
【課題】運転者の意図する走行ラインとのずれからくる違和感を低減しつつ、走行車線逸脱を有効に防止することが可能な車線維持支援装置を提供する。
【解決手段】自車両が走行する走行車線Lの幅方向中央からそれぞれ幅方向左右に横変位基準位置LXL、LXRを設ける。そして、少なくとも左右の横変位基準位置LXL、LXR以内に自車両が位置する場合、ヨー角偏差が小さくなるように自車両をフィードバック制御する。また、走行車線中央に対し左右の横変位基準位置LXL、LXRよりも外に自車両がいる場合、上記角度偏差および横変位偏差が小さくなるようにフィードバック制御する。角度偏差及び横方向偏差の少なくとも一方の偏差に応じて、相対的に前輪の転舵方向に対する後輪の転舵方向の位相を制御する。
(もっと読む)
1 - 20 / 104
[ Back to top ]