
Fターム[3D232EB30]の内容
走行状態に応じる操向制御 (73,124) | 制御対象(制御量) (5,762) | その他 (171)
Fターム[3D232EB30]に分類される特許
1 - 20 / 171
車両姿勢制御装置
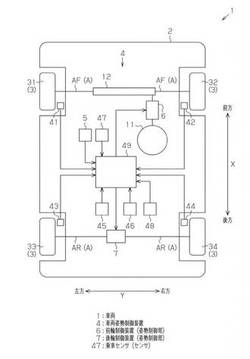
【課題】所定の乗車位置における乗り心地の向上に貢献する車両姿勢制御装置を提供する。
【解決手段】車両姿勢制御装置4は、車両1の姿勢を制御する前輪制御装置6および後輪制御装置7を備える。前輪制御装置6および後輪制御装置7の少なくとも一方は、車両1に乗っている乗員の数である乗員数および車両1に乗っている乗員の位置である乗車位置を検出する乗車センサ47の出力に基づいて車両1の姿勢を制御する。
(もっと読む)
車両の操舵抵抗付与装置

【課題】操舵の切り始めと戻し始めの微小操舵域において良好な操舵感が得られるとともに、ステアリングの剛性感を高めて高速走行時の安心感の向上を図ることができる車両の操舵抵抗付与装置を提供すること。
【解決手段】筒状のステアリングコラム1内に挿通する回転可能なステアリングシャフト2の回転に抵抗力を付与する抵抗付与手段5を設け、該抵抗付与手段5によって付与される抵抗力を車速に応じて変更する車両の操舵抵抗付与装置において、前記抵抗付与手段5をステアリングホイール4の近傍に配置するとともに、操舵角に基づいて算出される操舵速度の変化によってステアリングの切り始めを検知し、ステアリングの切り始め領域において前記抵抗付与手段5によって付与される抵抗力を他の領域において付与される抵抗力よりも大きく設定する。
(もっと読む)
電動パワーステアリング装置
【課題】開閉手段の作動音をユーザに聞こえ難くすることができる技術を提供する。
【解決手段】ドアを有する乗り物の進行方向を変えるためのステアリングホイールの操作に対するアシスト力を付与する電動モータと、電動モータに流れる電流を通電/遮断するべく電動モータに流れる電流の経路を開閉するリレーと、リレーの作動を制御するリレー作動部と、を備え、リレー作動部は、乗り物のドアの開閉音と重なるように開閉手段を作動させる。
(もっと読む)
ステアバイワイヤ式操舵装置
【課題】トー角調整時に転舵軸の非回転分割軸と回転分割軸とが互いに抜けることが防げ、トー角調整用モータの消費電力量を抑えることができるステアバイワイヤ式操舵装置を提供する。
【解決手段】非回転分割軸10Aと回転分割軸10Bとがねじ結合部で互いに結合された転舵軸10を備える。両分割軸10A,10Bを一体に軸方向移動させることにより、転舵輪を転舵させる。非回転分割軸10Aに対して回転分割軸10Bを回転させて、ねじ結合部の螺合長さを調整することにより、転舵輪のトー角を変える。一方の分割軸10Aに、径方向に広がるつば部90b,90cを有する被係合部材90を設ける。他方の分割軸10Bに、ねじ結合部の螺合長さが一定長さ以下になった場合に、つば部90cに係合して螺合長さが短くなる側への両分割軸10A,10Bの相対軸方向移動を規制する係合部材91を設ける。
(もっと読む)
車両用操舵装置およびその制御方法
【課題】ステアバイワイヤシステムを有する車両用操舵装置において、旋回制動時等の走行安定性を向上させること。
【解決手段】ステアバイワイヤシステムと、ステアリングラック部材14と車輪とを連結する転舵用リンク部材と、転舵用リンク部材と並行して設置し、車体と車輪とを車両上下方向に揺動可能に連結する懸架用リンク部材と、ステアリングラック部材14を車両前後方向に移動させるラック移動手段27a、27b、27cと、ラック移動手段27a、27b、27cによるステアリングラックの移動に応じて、入力側ステアリング軸と出力側ステアリング軸との連結状態を切り替えるクラッチ27dと、を有し、ラック移動手段27a、27b、27cが、ステアリングラック部材14を、転舵用リンク部材との連結点が懸架用リンク部材に近づく方向に移動させる車両用操舵装置とした。
(もっと読む)
電気自動車
【課題】 電気制御式の操舵機構の異常や、左右の駆動輪のモータ駆動系の異常に対し、操舵機構と左右個別のモータとによる旋回走行の相互補完機能を利用し、上記異常の発生時に、ドライバーの意図した方向に進めるように制御できる電気自動車を提供する。
【解決手段】 左右の駆動輪2,2を駆動する独立したモータ6,6と、転舵機構11に機械的に連結されていないステアリングホイール14により操舵する操舵機構12を備える電気自動車に適用する。異常時補完手段37として、操舵系の異常の検出によって、その異常による転舵不足を補うように、左右駆動輪2,2のトルク指令の配分を変更する異常対応トルク配分変更部39を設ける。また、車輪駆動系の異常検出によって、その異常による左右両駆動輪2,2の駆動バランスの変化量を補うように、操舵機構12の転舵用モータ13の回転量を変更する異常対応転舵量変更部38を設ける。
(もっと読む)
駐車場の自動駐車システム
【課題】車両を、駐車開始位置から車両駐車スペースまで自動運転させて駐車できるようにする自動駐車システムの提供である。
【解決手段】車両8に搭載されたカメラ12が撮影した映像が、自動駐車センタ9の画像処理コンピュータ15に無線送信され、画像処理コンピュータ15は、カメラ12の映像から車両画像22と駐車場画像26とを作成し、ディスプレイ21に表示する。オペレータ25が模擬ステアリング23と模擬アクセルレバー24とを操作してディスプレイ21の車両画像22を駐車スペース画像27に駐車させたときのステアリング角度の変位とアクセルの変位とを車両8の自動駐車ECU13に無線送信し、車両8を駐車開始位置Pから駐車スペース5cまで自動運転させる。
(もっと読む)
ステアリング装置
【課題】 追加のモータを一つ備えることで、大舵角調整機能とフェールセーフ機能を同時に付加できて、追加のモータの効率的な使用が行えるステアリング装置を提供する。
【解決手段】 車台1に回転自在に支持されるサスペンションホルダ2に、このサスペンションホルダ2に対して車輪6の転舵を行わせるホルダ上転舵用支持機構5を設ける。サスペンションホルダ2と共に車輪6を転舵する第1の転舵機構7を設ける。サスペンションホルダ2に対して車輪6を転舵する第2の転舵機構8を設ける。これら各転舵機構7,8に転舵用のモータ9,10を設ける。各車輪6にインホイールモータ20を設ける。
(もっと読む)
移動体の操舵反力調整装置
【課題】運転者の疲労状態により適した操舵反力に近づくように当該操舵反力を調整可能とすることを目的とする。
【解決手段】操舵反力用コントローラ6は、筋力検出部11と、疲労推定部12と、反力調整部13とを備える。筋力検出部11は、筋骨格モデルとアドミタンス計測手法をもちいて、運転者の肩部から手までに位置する腕の筋肉のうちから選択した複数の筋の筋力を推定する。そして、推定した複数の筋の疲労度と操作子の操舵状態とに基づき、操作子に付加する操舵反力を調整する。
(もっと読む)
車両用操舵装置および車両用操舵装置の異常判定方法
【課題】伝達比をロックするためのロック機構の異常をより正確に検出することのできる車両用操舵装置を提供する。
【解決手段】車両用操舵装置1は、ステアリングシャフト3の入力軸18と出力軸19との間の伝達比を変更可能な伝達比可変機構13と、伝達比を変更するための伝達比制御モータ14と、伝達比を固定するためのロック機構25と、制御部とを備える。ロック機構25は、キャリア57の回転を規制するためのロック部材62と、ロック部材62をキャリア57に係合する第1位置P1と係合しない第2位置P2とに変位可能に支持するソレノイド61と、を含む。制御部の判定部は、ロック部材62を第2位置P2に変位するようにロック機構25が制御された後、ロック部材62が第1位置P1にあるときに、ロック機構25に異常が生じていると判定する。
(もっと読む)
車両のパワーステアリング装置
【課題】操舵に対するアシスト力による車両応答の非線形性を低減することができる車両のパワーステアリング装置を提供する。
【解決手段】ステアリングホイール4から入力されたドライバの操舵力をステアリングギヤ機構に伝達する機構的な操舵力伝達系のねじり剛性を剛性可変機構50を通じて変化させ、ドライバの操舵入力が不感帯を脱する過渡時におけるねじり剛性を、操舵の中立位置におけるねじり剛性よりも相対的に低くなるよう変化させる。この場合において、操舵力伝達系に介装される細径部の有効長さを可変に制御することによって操舵力伝達系のねじり剛性を変化させるよう剛性可変機構50を構成し、操舵アシスト機構で発生するアシスト力の増加に伴って細径部の有効長さが長くなるよう制御する。
(もっと読む)
電動油圧装置および電動油圧装置の作動油温度制御方法
【課題】温度による作動油粘性変動により電動油装置の作動が不安定になることを防止する。
【解決手段】車両用の電動油圧パワーステアリング装置等の電動油圧装置において、電動モータ50を制御するインバータ42を、油圧ポンプ60を駆動する電動モータ50に隣接させて一体に構成すると共に、油圧配管66をインバータ42に近接して配置し、インバータ42と電動モータ50から発生した熱を油圧配管66に伝達し、作動油の温度変化を抑制する。
(もっと読む)
ステアバイワイヤ式操舵装置
【課題】 転舵用モータが失陥しても転舵を行うことができ、かつトー角調整用モータが失陥してもトー角調整機構を固定して安全に走行でき、しかもトー角調整用モータの容量を小さくでき構成がコンパクトなステアバイワイヤ式操舵装置を提供する。
【解決手段】 転舵用モータ6の回転を転舵軸10に伝える転舵動力伝達機構18と、トー角調整用モータ7の回転でトー角を調整するトー角調整動力伝達機構30と、モータ6,7の失陥時に、各モータ6,7の動力伝達経路を切り換えて転舵可能にする切換機構17とを備える。転舵軸10は、ねじ結合部10Cで結合した非回転分割軸10Aと回転分割軸10Bとでなり、両分割軸10A,10Bを一体に軸方向移動させて転舵する。回転分割軸10Bを回転させ、ねじ結合部10Cの螺合長さを調整してトー角を調整する。回転分割軸10Bは、スラスト軸受とボールジョイントを介してタイロッドに連結する。
(もっと読む)
運転者支援システムのための実世界の交通場面からの視覚特性の行動ベース学習
【課題】運転者支援システムをセットアップおよび運用するための、コンピュータに実装される方法を提供する。
【解決手段】車両の環境を視覚感知するステップと、車両のマン・マシン・インタフェースを操作している運転者の影響を受ける可能性がある、車両の状態を表すパラメータの少なくとも1つの変化率を感知するステップと、感知された変化率の特定のカテゴリに関連付けられ、したがって、運転者の特定行動に関連付けられた視覚的特徴を見つけるために、視覚感知によって収集された情報を、少なくとも1つの感知された変化率をその様々なカテゴリに分類することによって構造化するステップと、を含む。
(もっと読む)
車両用ステアリング装置
【課題】車両用ステア・バイ・ワイヤ式ステアリング装置において、ステアリングホイールの操舵角を容易に且つ確実に制限すること。
【解決手段】ステアリングホイール21に対して、転舵機構30を機械的に分離するとともに電気的には接続した車両用ステアリング装置10であり、ステアリングホイールに連結された第1回転軸41と、転舵機構に連結された第2回転軸42と、これら第1・第2回転軸同士を一定の相対的な回転角の範囲で互いに空転可能に連結する連結機構43とを有している。
(もっと読む)
アーティキュレート車両における小旋回制御装置
【課題】車両オペレータの操作体による単純な小旋回用ブレーキ操作によって左右いずれか一方の車輪ブレーキを自動的に選択しつつ、制動力は車両オペレータの手動感覚で任意に調整できるアーティキュレート車両における小旋回制御装置を提供する。
【解決手段】メインブレーキマスタシリンダ51とは別に設置した小旋回ブレーキマスタシリンダ56からハンドブレーキレバー58の操作量に応じて発生し左右の車輪ブレーキ37,38または39,40に制動力として作用する制動圧の供給を、旋回内側に対応する左小旋回制御弁62または右小旋回制御弁64のいずれか一方により制御する。左小旋回制御弁62または右小旋回制御弁64のいずれか一方は、アーティキュレート角センサからの信号によりコントローラが自動的に選択して弁開状態に制御する。車両オペレータは、制動力を実感しながら車体の安定性を保持できるように微妙な調整を行なうことができる。
(もっと読む)
車両用制御装置
【課題】高グリップ性と低燃費との両立を図ることができる制御装置及び車両を提供すること。
【解決手段】車輪2のキャンバー角がネガティブキャンバーに調整されると、第1トレッド21の接地圧が増加されると共に、第2トレッド22の接地圧が減少される。これにより、高グリップ性が発揮される。一方、車輪2のキャンバー角がポジティブキャンバーに調整されると、第1トレッド21の接地圧が減少されると共に、第2トレッド22の接地圧が増加される。これにより、低転がり抵抗となり、省燃費が達成される。このように、車輪2のキャンバー角を調整することで、高グリップ性と省燃費との背反する性能の両立を図ることができる。
(もっと読む)
車両用制御装置
【課題】高グリップ性と低燃費との両立を図ることができる制御装置及び車両を提供すること。
【解決手段】車輪2のキャンバー角がネガティブキャンバーに調整されると、第1トレッド21の接地圧が増加されると共に、第2トレッド22の接地圧が減少される。これにより、高グリップ性が発揮される。一方、車輪2のキャンバー角がポジティブキャンバーに調整されると、第1トレッド21の接地圧が減少されると共に、第2トレッド22の接地圧が増加される。これにより、低転がり抵抗となり、省燃費が達成される。このように、車輪2のキャンバー角を調整することで、高グリップ性と省燃費との背反する性能の両立を図ることができる。
(もっと読む)
電動パワーステアリング装置
【課題】モータ線の地絡に対しブレーキ電流を遮断することにより、操舵力がマニュアルステアリングより重くなることを防止し、安全性を向上させる。
【解決手段】複数のスイッチング素子706a〜706bで構成されたモータ駆動回路706と、モータ駆動回路706の入力端子間に接続された車載電源10と、モータ駆動回路706の出力端子間に接続され、補助力をステアリング系に作用させるモータ8とを備えた電動パワーステアリング装置であって、モータ駆動回路706と車載電源10との間のグランドラインにリレー708を接続した。
(もっと読む)
車両用操舵装置
【課題】省エネルギに寄与することができ、耐久性に優れた車両用操舵装置を提供する。
【解決手段】停車中(車速=0)あるいは微速走行のときに大きな操舵角θH(|θH|≧θH0)の操舵がなされた場合、目標転舵角θW*を、制限を受けていない通常マップ(破線で示す)上の通常値θWA*(または−θWA*)と零との間の所定の制限値θW0*(または−θW0*)に制限する。
【効果】次に停車時から発進するとき、または微速から走行速度を増加させるときに、実際の転舵角θWの絶対値が過度に大きい状態で走行するようなことがないので、走行抵抗を低減できる。
(もっと読む)
1 - 20 / 171
[ Back to top ]