
Fターム[3D233CA02]の内容
パワーステアリング装置 (30,926) | 電気式パワーステアリング (28,865) | 電動機 (7,400) | 電動機の配置、取付け機構 (2,517)
Fターム[3D233CA02]に分類される特許
201 - 220 / 2,517
車両用操舵装置および操舵制御方法
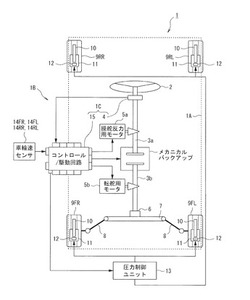
【課題】ステアバイワイヤシステムにおいて付与する操舵反力をより適切なものとすること。
【解決手段】操向輪9FR、9FLの操舵において発生する路面と操向輪9FR、9FLとの摩擦エネルギを算出する摩擦エネルギ算出手段と、摩擦エネルギと操舵角とに基づいて操舵トルクあるいはステアリングラック部材7のラック軸力を推定する操舵力推定手段と、操舵力推定手段が推定した操舵トルクあるいはラック軸力に応じて、ステアバイワイヤシステムにおける操舵反力用モータ5aの駆動制御を行う操舵反力用モータ制御手段とを有する車両用操舵装置とした。
(もっと読む)
電動パワーステアリング装置

【課題】トルクセンサの異常時においても、継続して安定したステアリング操作を行なうことのできる電動パワーステアリング装置を提供すること。
【解決手段】操舵トルクセンサの異常が検出された場合には、操舵トルクセンサに替えて、横Gに基づくアシスト力目標値に相当するモータトルクを発生させ、駆動電力の供給を実行することによりアシスト制御を継続する。その結果、横Gに基づくアシスト力目標値を発生させているので、路面状況の変化等を運転者に十分伝えることができ、操舵フィーリングの向上が図れる。
(もっと読む)
トルクセンサ
【課題】 捩じれ変位に伴う磁束の周期的変動による影響を抑制し磁気センサの出力を安定させるトルクセンサを提供する。
【解決手段】 トルクセンサ2は、入力軸11と出力軸12とを同軸上に連結するトーションバー13、入力軸11に固定される多極磁石14、出力軸12に固定される一組の磁気ヨーク31、32、磁気ヨーク31、32から磁束を集める一組の集磁リング611、612、及び磁束密度を検出する磁気センサ41から構成される。一組の集磁リング611、612は半楕円形状に形成されており、磁気センサ41が設けられる集磁部61aにおいて多極磁石14との距離が最大となる。すなわち、磁気センサ41は、多極磁石14から可及的に遠ざけられて配置される。これにより、磁束の周期的変動による磁束センサ41への影響が抑制される。よって、磁束センサ41の出力電圧を安定させることができる。
(もっと読む)
トルクセンサ及びこれを備えた電動パワーステアリング装置
【課題】トルクセンサのセンサ感度の向上とストッパ強度の確保を行いながら加工コストを低減することができるトルクセンサ及び電動パワーステアリング装置を提供する。
【解決手段】同軸に配設された第1及び第2の回転軸1,2を、トーションバー3を介して連結するとともに、前記第1の回転軸の外周面を包囲する円筒部材12を前記第2の回転軸と回転方向に一体に形成し、前記第1の回転軸1に、前記円筒部材の内周面と対向して、軸方向に延長する複数の凸条11aを形成する溝11bを形成し、前記円筒部材12に前記凸条11aとの重なり度合いが変化する窓12,12bを形成し、当該窓と前記凸条との重なり度合いに基づいてトルクを検出するようにしたトルクセンサであって、前記第1の回転軸1に、前記凸条11aを形成する溝11bを複数ずつグループ化するように前記第1及び第2の回転軸の相対回動角度を規制するストッパ溝11cを形成した。
(もっと読む)
ステアバイワイヤ式操舵装置
【課題】トー角調整時に転舵軸の非回転分割軸と回転分割軸とが互いに抜けることが防げ、トー角調整用モータの消費電力量を抑えることができるステアバイワイヤ式操舵装置を提供する。
【解決手段】非回転分割軸10Aと回転分割軸10Bとがねじ結合部で互いに結合された転舵軸10を備える。両分割軸10A,10Bを一体に軸方向移動させることにより、転舵輪を転舵させる。非回転分割軸10Aに対して回転分割軸10Bを回転させて、ねじ結合部の螺合長さを調整することにより、転舵輪のトー角を変える。一方の分割軸10Aに、径方向に広がるつば部90b,90cを有する被係合部材90を設ける。他方の分割軸10Bに、ねじ結合部の螺合長さが一定長さ以下になった場合に、つば部90cに係合して螺合長さが短くなる側への両分割軸10A,10Bの相対軸方向移動を規制する係合部材91を設ける。
(もっと読む)
電動パワーステアリング装置
【課題】 ブラシ付モータ20のブラシの位置ずれを検出する。
【解決手段】 位置ずれ検出部80は、モータ実電流Imとモータ端子間電圧Vmと回転角速度ωとに基づいて、モータ20の逆起電圧定数Keを計算し、そのデータ(Ke,Im)をサンプリングする(S31〜S34)。そして、電流方向別にモータ実電流Imに対する逆起電圧定数Keの特性を表す近似式を計算し(S35)、プラス方向のモータ実電流Imに対する逆起電圧定数Keの近似式の1次係数A1と、マイナス方向のモータ実電流Imに対する逆起電圧定数Keの近似式の1次係数A2のとの偏差ΔAが判定基準値Arefを超える場合に、ブラシの位置ずれが生じていると判定する(S39)。
(もっと読む)
駆動装置
【課題】 モータとコントロールユニットとを容易に結合と分離が可能な駆動装置を提供する。
【解決手段】 電動パワーステアリング装置に適用される駆動装置1は、モータ2と、モータ2の出力端29とは反対側に設けられるコントロールユニット3とを備える。モータ2のモータ線23とコントロールユニット3のパワー基板側端子371とを接続するターミナル31は、パワー基板側端子371と係合する。これにより、特別な道具を必要とせず容易にモータ2とコントロールユニット3との電気的な接続または切断をすることができる。また、ターミナル31を保持するターミナルホルダ33は、ターミナルホルダ33のモータ2側の端部に形成される第1短突起部344および第2短突起部362が開口18の周縁部17に係止される。これにより、保持するターミナル31のモータ2に対する相対位置を固定することができる。
(もっと読む)
ステアリング制御装置
【課題】車両の走行安定性を向上させることが可能なステアリング制御装置の提供。
【解決手段】位相検出部18は、操舵輪側で発生する実舵角θbがステアリングホイール側で発生する操舵角θaに対して一方の回転方向へ先行して変化する進み位相状態であるか否かを判定し、実舵角θbが進み位相状態である場合、モータベクトル制御部17は、上記一方の回転方向に対して反対方向へ向かう制動トルクを発生させる指令信号をモータ3へ出力する。
(もっと読む)
相対角度検出装置および電動パワーステアリング装置
【課題】ハウジング外において電線に力が作用したとしても、ハウジング内の電線の端部に大きな力が及ばないようにする技術を提供する。
【解決手段】内外を連通する連通孔が形成されたハウジング内に収納され、互いに同軸的に配置された2つの回転軸の相対回転角度に応じた電気信号を出力する相対角度センサと、相対角度センサから出力される電気信号をハウジング外に配置されるECUに伝送する電線と、ハウジングの連通孔に嵌合されて電線を保持するグロメット320と、ハウジングの外側に配置され、互いに結合されることで電線を屈曲させた状態で把持するキャップ400と、を備える。
(もっと読む)
車両統合制御装置
【課題】左右輪差動制限機構の作動に伴う操舵トルク変化を精度よく抑制し、運転者のステアリング操作時の違和感を解消し、走破性と安定性とを両立させる。
【解決手段】電子制御式の左右輪差動制限機構81の拘束トルク制御量に比例して拘束トルク比例制御手段201が操舵力制御機構へ出力させる付加トルクと、操舵反力フィードバック制御手段204が操舵力制御機構へ出力させる、演算した操舵系反力を打ち消す方向の付加トルクとの割合を、前記左右前輪の回転速度差に応じて切り替える第1の前輪左右速差補正係数規定手段202、第2の前輪左右速差補正係数規定手段205、第1の乗算処理手段203、第2の乗算処理手段206および加算手段207とを備える。
(もっと読む)
電動パワーステアリング装置
【課題】操舵系にアシスト力を付与するモータについて、その抵抗値を精確に算出することのできる電動パワーステアリング装置を提供する。
【解決手段】この電動パワーステアリング装置は、電流値Imおよび電圧値Vmに基づいて外乱オブザーバにより推定誘起電圧EXaを算出する。そして、推定誘起電圧EXaが所定範囲内にあるとき電流値Imおよび電圧値Vmに基づいて抵抗値を算出する。さらに、最後に取得した電圧値Vmよりも前に取得した電圧値Vm(過去電圧値)および最後に取得した電流値Imよりも前に取得した電流値Im(過去電流値)に基づいて外乱オブザーバの演算式を補正する。
(もっと読む)
電動パワーステアリング装置
【課題】電動パワーステアリング装置において、モータに電流を流す通電路に設けた開閉リレーが溶着等により閉故障した場合、安全に操舵アシストを継続して、運転者の感じる不便を軽減する。
【解決手段】リレー故障検出部61により開閉リレー48の閉故障が検出されると、制御態様変更部80は、目標電流演算部71、電流指令値演算部72、PWM制御部73に対して、回路故障抑制操舵アシスト制御の実行を指令する。回路故障抑制操舵アシスト制御時においては、モータ駆動回路40の故障が抑制されるように、モータ20の上限電流Imax、あるいは、上限電圧Vmax、あるいは、上限電力Pmax、あるいは、目標電流I*、あるいは、電圧指令値V*が低減される。
(もっと読む)
モータ制御装置及び車両用操舵装置
【課題】その目的は、モータ回転角速度を判定条件に加えることなく、精度良く通電不良を検出することのできるモータ制御装置及び車両用操舵装置を提供する。
【解決手段】通電不良検出部71は、相電流値が所定電流値以下であり、且つ電源電圧Vpsが所定電圧値以上である場合に、連続してDUTY指令値が所定電流値に対応する所定範囲の上限値以上であるという第1の判定条件、及び連続してDUTY指令値が下限値以下であるという第2の判定条件を満たすか否かを判定する。そして、通電不良検出部71は、第1の判定条件を満たす状態が継続する時間である第1の継続時間と、第2の判定条件を満たす状態が継続する時間である第2の継続時間とをそれぞれ計測し、第1又は第2の継続時間が、高速回転時におけるモータ21の回転周期に基づく判定時間を超えた場合に、通電不良が発生したと判定するようにした。
(もっと読む)
ステアリング装置、産業車両およびプログラム
【課題】産業車両に搭載されるステアリング装置において、ストッパーの位置関係を調整することなく、所望の旋回半径で安定的に旋回できるようにする。
【解決手段】操舵輪の操舵角が設定操舵角に到達した以降(s230「YES」)、ステアリング51への操舵トルクが制御されることで(s240)、設定操舵角を超えるような操舵輪の操舵が制限される。「設定操舵角」は、フォークリフトを所定の旋回半径で旋回させるのに適した操舵角として、設定変更可能な値であるホイルベースに応じたものが設定されるため(s220)、フォークリフトの機種などによりホイルベースが異なる場合であっても、このホイルベースを事前に設定変更しておくことにより、ホイルベースの違いに拘わらず、所望の旋回半径で安定的に旋回できるようになる。
(もっと読む)
モータ制御装置及び車両用操舵装置
【課題】精度良くモータ回転角を推定することのできるモータ制御装置及び車両用操舵装置を提供する。
【解決手段】モータ回転方向推定部は、誘起電圧値Eが所定電圧値Ethよりも大きい場合には(ステップ201:YES)、各軸誘起電圧値eα,eβの符号の組み合わせ、及びこれらの大小関係に基づいてモータの粗回転位置を推定し(ステップ203)、粗回転位置の遷移に基づいてモータの回転方向を推定するようにした(ステップ208)。
(もっと読む)
相対角度検出装置および電線保持具
【課題】ハウジング外において電線に力が作用したとしても、ハウジング内の電線の端部に大きな力が及ばないようにする技術を提供する。
【解決手段】内外を連通する連通孔が形成されたハウジング内に収納され、互いに同軸的に配置された2つの回転軸の相対回転角度に応じた電気信号を出力する相対角度センサと、相対角度センサから出力される電気信号をハウジング外に配置される電子制御ユニットに伝送する電線と、ハウジングの連通孔に嵌合されるとともに電線を保持するグロメット320と、ハウジングの連通孔におけるグロメット320よりも外側の部位に挿入されるとともに電線が通る直線状の貫通孔331と貫通孔方向と交差する方向の嵌合孔334とが形成されたソケット330と、ソケット330の嵌合孔334に嵌め込まれることで貫通孔331まで突出し、貫通孔331を通る電線に対して貫通孔方向と交差する方向に押圧するキャップ340と、を備える。
(もっと読む)
電動パワーステアリング装置
【課題】電動パワーステアリング装置を制御する装置が有する記憶装置に不具合が発生したとき、アシスト可能な場合にはアシストを継続すること。
【解決手段】電動パワーステアリング装置が備えるECU30は、CPU101、RAM102及びROM103を有している。RAM102は、正常状態で使用される正常時記憶領域と、不具合が発生したときに使用される不具合発生時記憶領域とを有する。ROM103は、正常状態で使用されるコンピュータプログラムが記憶される正常時用プログラム記憶領域と、不具合が発生したときに使用されるコンピュータプログラムが記憶される不具合発生時用プログラム記憶領域とを有している。CPU101は、電動パワーステアリング装置の制御における複数の機能を実現するとともに、RAM102及びROM103の不具合を検出する。
(もっと読む)
パワーステアリング装置及びパワーステアリング装置の組立方法
【課題】
車載レイアウト性を向上することができるパワーステアリング装置を提供すること。
【解決手段】
操舵軸2を収容するハウジング4を、操舵軸2の回転状態を検出するためのセンサコイル31を収容する第1ハウジング部(センサハウジング5)と、第1ハウジング部の軸方向一方側の開口部を閉塞する第2ハウジング部(ギヤハウジング6)と、から構成し、センサコイル31と電気的に接続されるセンサ基板33を、第1ハウジング部の上記開口部側に配置した。
(もっと読む)
電動パワーステアリング装置
【課題】ボールねじの循環部の外径を大きくすることなく、耐久性を確保することができる電動パワーステアリング装置を提供する。
【解決手段】電動モータと、操舵機構とタイロッドとの間に連結されたラック軸3と、前記電動モータからの動力を前記ラック軸3に伝達する動力伝達機構と、を有し、前記動力伝達機構は、前記ラック軸3に対して連結又は一体化され且つ雄ねじ溝を備えたねじ軸9と、該ねじ軸の周囲に配置され且つ雌ねじ溝を備えたナットと、前記雄ねじ溝と前記雌ねじ溝との間に転動可能な複数の転動体を有するボールねじ機構からなる電動パワーステアリング装置であって、前記ラック軸3のストロークエンド内の少なくとも一方において、前記ナットの荷重支持力減少領域LAが前記ラック軸3と当該ラック軸に接続されたタイロッドの成す平面で定義されるラック軸円周方向の位相位置φp,φp′以外の領域に位置するように設定した。
(もっと読む)
電動パワーステアリング装置
【課題】車速によらず、制御安定性を確保するとともに、操舵フィーリングが低下することのない電動パワーステアリング装置を提供する。
【解決手段】電動モータにアシストトルクを発生させるアシスト電流Iaの値を、操舵トルクセンサ30により検出された操舵トルクVT3の値で割った除算値(アシスト電流/操舵トルク=Ia/VT3)が大きい程、操舵トルクセンサ30から出力される操舵トルクVT3に対して大きな遅れ位相補償(小さな進み位相補償)を施すようにしたので、制御安定性が確保されるとともに、操舵フィーリングが低下する除算値の小さい領域では、大きな進み位相補償を施すようにしたので、良好な操舵フィーリングが得られる。よって、低速での操舵フィーリングも低下することがない。
(もっと読む)
201 - 220 / 2,517
[ Back to top ]