
Fターム[3D233CA12]の内容
パワーステアリング装置 (30,926) | 電気式パワーステアリング (28,865) | 電動機などの制御のための検出 (13,688) | 車両の運動状況 (4,070)
Fターム[3D233CA12]の下位に属するFターム
車両の速度 (3,122)
車両の加速度、横加速度 (573)
Fターム[3D233CA12]に分類される特許
41 - 60 / 375
摩擦状態推定装置
【課題】 直進走行時や急旋回走行時等における誤推定を抑制した摩擦状態推定装置を提供する。
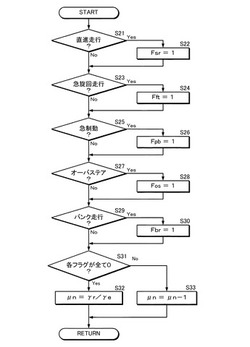
【解決手段】 ATTS−ECU16は、ステップS31で直進走行フラグFsr,急旋回走行フラグFft,急制動フラグFpb,オーバステアフラグFos,バンク走行フラグFbrが全て0であるか否かを判定し、この判定がYesであればステップS32で実ヨーレイトγrを標準ヨーレイトγeで除すことにより路面μの今回値μnを推定/出力する。一方、各フラグFsr,Fft,Fpb,Fos,Fbrのうち少なくとも1つが1であり、ステップS31の判定がNoとなると、ATTS−ECU16は、ステップS33で路面μの前回値μn−1を今回値μnとしてそのまま出力する。
(もっと読む)
摩擦状態推定装置

【課題】 直進走行時や急旋回走行時等における誤推定を抑制した摩擦状態推定装置を提供する。
【解決手段】 ATTS−ECU16は、ステップS21で実ヨーレイトγrが所定の直進判定閾値γthより小さいか否かを判定し、この判定がYesであればステップS22で直進走行フラグFsrを1とする。ATTS−ECU16は、ステップS31で直進走行フラグFsrが1であるか否かを判定し、この判定がYesであればステップS32で路面μの初期値μintを今回値μnとして出力する。初期値μintは、標準タイヤを装着した車両が標準路面(乾燥アスファルト路面等)を走行する際の路面μであり、例えば「0.7」程度に設定されている。
(もっと読む)
車両の操舵装置
【課題】 車両の横方向に加わる外乱による挙動変化に伴って発生する横加速度を適切に寄与させて車輪を転舵制御する車両の操舵装置を提供すること。
【解決手段】 目標横加速度演算部101は、目標とするθMA−γ特性を実現するθMA−G特性に基づいて設定されるフィルタX(s)と操舵角θMAとを乗算して、目標横加速度G*を計算する。フィードフォワード演算部102は、目標横加速度G*に基づいてフィードフォワード制御値δffを演算する。横加速度偏差演算部103は、目標横加速度G*と実横加速度Gとの偏差ΔGを計算し、PI制御部104が偏差ΔGに応じたフィードバック制御値Δδfbを演算する。そして、目標転舵角演算部105は、制御値δffと制御値Δδfbとを加算して目標転舵角δ*を計算する。
(もっと読む)
車両用操舵装置及び車両用操舵方法
【課題】ヨーレートセンサを設けることなく車両の片流れの抑制を精度良く行うことができる車両用操舵装置及び車両用操舵方法を提供する。
【解決手段】車輪速センサ16FL〜16RRで検出した車輪速VFL〜VRRの履歴を取得し、その履歴を統計処理することで、左右のタイヤ動半径の差異によって発生する車輪速VFL〜VRRの検出誤差を推定する。次に、推定した検出誤差分、車輪速センサ16FL〜16RRで検出した車輪速VFL〜VRRを補正する。補正後の車輪速VFL〜VRRに基づいて、車両のヨーレートφを推定し、推定したヨーレートφに基づいて車両の直進判定を行う。そして、直進走行時の転舵トルクTpを打ち消す方向の片流れ抑制操舵補助トルクを操舵部に付加する片流れ抑制制御を行う。
(もっと読む)
揺動型歯車装置、伝達比可変機構、および車両用操舵装置
【課題】振動および騒音の発生を抑制できる揺動型歯車装置を提供する。
【解決手段】本揺動型歯車装置78は、第1の軸線Z1の回りに回転可能な第1の歯車211と、第1の軸線Z1に対して傾斜した状態で揺動する第2の軸線Z2の回りに回転可能な第2の歯車212とを有する。第1の歯車211の複数のピン77が、第2の歯車212の複数の歯溝80に、ピン77の長手方向X5に関して所定長さX2の係合領域771,803で係合する。ピン77の中心軸線J1は、係合領域771,803とはピン77の径方向R5に対向する対向領域J11を含む。対向領域J11内の任意の点P2と第1の軸線Z1との距離rCO、任意の点P2と第2の軸線Z2との距離rFO、第1の歯車211のピン77の数ZC 、および第2の歯車212の歯溝80の数ZF とするときに、式(1) :rCO/rFO=ZC /ZF が成立する。
(もっと読む)
電動パワーステアリング装置
【課題】充電完了する前に急速な操舵が行われても、操舵中に操舵補助力が急落することのない電動パワーステアリング装置を提供する。
【解決手段】主電源としてのバッテリ6から又は当該バッテリ6及び補助電源としてのキャパシタ7からモータ4に電力を供給することが可能であり、操舵トルクに応じてモータ4により操舵補助力を生じさせる電動パワーステアリング装置1において、キャパシタ7から電力を供給する必要があるとき、キャパシタ7の充電率が所定値以下の充電不足状態であれば、制御回路13により、操舵トルクに応じた本来の操舵補助力を予め抑制可能とする。
(もっと読む)
車両用運転操作補助装置、車両用運転操作補助方法および自動車
【課題】より運転者の意図に整合する運転操作支援を行うこと。
【解決手段】本発明に係る自動車では、制御仮値設定手段が、自車両のリスクが縮小する方向に車両制御手段における車両制御の仮値を設定し、仮値に基づいて車両制御手段が実行した車両制御に対する運転者の応答操作を応答検出手段が検出する。制御本値設定手段は、応答検出手段によって検出された運転者の応答操作に基づいて、車両制御の本値を設定する。
(もっと読む)
電動パワーステアリング装置
【課題】 車速センサフェール時においても、車速に応じた良好な操舵アシストトルクが得られるようにする。
【解決手段】 操舵角θに対するヨーレートγの大きさを表すヨーゲインGと車速との関係を表すヨーゲインマップを予め記憶しておく。車速センサフェール時においては、ヨーレートγと操舵角θとを検出し、ヨーゲインマップを参照して推定車速Vsを算出する。この推定車速Vsに対して徐変処理を行って、最終的な補正推定車速Vsxを算出する。車速センサにより検出される車速Vに代えて補正推定車速Vsxを用いてアシストトルクマップを参照することにより、目標アシストトルクを設定する。これにより、良好な操舵アシストトルクが得られる。
(もっと読む)
車両用操舵制御装置および車両用操舵制御方法
【課題】車両のヨー方向への回転変位を抑制可能とすること。
【解決手段】補助舵角演算部9が、左右の車輪間の制動力の差によって車両にヨーモーメントが発生する場合、車両に当該ヨーモーメントを打ち消す制御ヨーモーメントを発生させるために必要な操向輪の転舵角である補助舵角δ*を算出する。そして、ヨーモーメント変化速度演算部10および補助舵角補正演算部11が、その算出した補助舵角δ*を補正し、補正補助舵角δ*'として出力する。その際、ヨーモーメント変化速度dMG/dtの絶対値が大きい場合には、ヨーモーメント変化速度dMG/dtの絶対値が小さい場合に比べて、補助舵角δ*の補正量である補助舵角補正量δ'の絶対値を大きくする。
(もっと読む)
車両用操舵制御装置および車両用操舵制御方法
【課題】高μ路側に接地している車輪の低μ路側への移動を抑制し、車両のヨー方向への回転変位を抑制可能とすること。
【解決手段】ヨーモーメント演算部18が、車両がスプリットμ路を走行しているときに、車輪に制動力が発生した場合、左右の車輪間の当該制動力の差によって車両に発生するヨーモーメントを算出する。また、制動時前後輪舵角演算部21が、ヨーモーメントが第1設定値以上である場合には、前記目標ヨーレイトを低減する。さらに、当該ヨーモーメントが第2設定値未満である場合と比較して、目標横減速度を低減する。
(もっと読む)
車両用操舵制御装置及び車両用操舵制御方法
【課題】片流れ抑制制御に用いる入力値の異常を検知して、片流れの抑制を適正に行うことができる車両用操舵制御装置及び車両用操舵制御方法を提供する。
【解決手段】トルクセンサ11で検出した操舵トルクT、及びヨーレートセンサ15で検出したヨーレートYに基づいて、車両の片流れを抑制する片流れ抑制制御を行う。このとき、操舵トルク検出値T、ヨーレート検出値Y及び片流れ抑制制御の電流指令値Ibの推移に基づいて、操舵トルク検出値T及びヨーレート検出値Yの異常(誤差が含まれているか否か)を検知する。そして、異常が発生している場合には、その検出値を補正する。
(もっと読む)
車線維持支援装置及び車線維持支援方法
【課題】運転者の意図する走行ラインとのずれからくる違和感を低減しつつ、走行車線逸脱を有効に防止することが可能な車線維持支援装置を提供する。
【解決手段】自車両が走行する走行車線Lの幅方向中央からそれぞれ幅方向左右に横変位基準位置LXL、LXRを設ける。そして、少なくとも左右の横変位基準位置LXL、LXR以内に自車両が位置する場合、ヨー角偏差が小さくなるように自車両をフィードバック制御する。また、走行車線中央に対し左右の横変位基準位置LXL、LXRよりも外に自車両がいる場合、上記角度偏差および横変位偏差が小さくなるようにフィードバック制御する。角度偏差及び横方向偏差の少なくとも一方の偏差に応じて、相対的に前輪の転舵方向に対する後輪の転舵方向の位相を制御する。
(もっと読む)
車両制御装置
【課題】RTCの制御と左右前輪の駆動力配分の制御とを組み合わせて、車両の安定化と旋回のしやすさとを併せて実現させることができる車両制御装置を提供する。
【解決手段】低速走行時は、駆動力配分装置200の制御ゲインを、駆動力配分制御ゲイン可変手段200tにより増加し、かつRTC装置120の制御ゲインを、RTCゲイン可変手段120tにより減少することにより、走行中の車両の旋回性能を向上させる。また、高速走行時は、駆動力配分装置200の制御ゲインを、駆動力配分制御ゲイン可変手段200tにより減少し、かつRTC装置120の制御ゲインを、RTCゲイン可変手段120tにより増加することにより、走行中の車両の安定性能を向上させる。
(もっと読む)
車両用操舵装置及び車両用操舵方法
【課題】車両起因による片流れの抑制を精度良く行うことができる車両用操舵装置及び車両用操舵方法を提供する。
【解決手段】車両の直進走行状態を検出したときの転舵トルクTpの履歴に基づいて、直進走行時の転舵トルクTpを打ち消す方向の片流れ抑制操舵補助トルクを操舵系に付与する片流れ抑制制御を行う。このとき、操舵トルクTとヨーレートφとの差|T−φ|が所定の閾値TH1以上であるときには、操向輪の転舵に対して車両挙動が遅れている状態であると判断する。そして、この場合には、車両の直進走行状態を非検出として、そのときの転舵トルクTpを上記履歴に含めない。
(もっと読む)
車両の挙動支援装置及び車両の挙動支援方法
【課題】転舵輪の路面限界舵角をより精度よく導出できる車両の挙動支援装置及び車両の挙動支援方法を提供する。
【解決手段】ECUは、車両がアンダーステア状態になったと判定した場合(ステップS16が肯定判定)、アンダーステア状態になった時点の車両の車体速度VS及びステアリングホイールの操舵角θに基づき摩擦限界舵角σ_fを導出し(ステップS17)、その後、路面の悪路指数Nrwを演算する(ステップS18)。続いて、ECUは、路面の悪路指数Nrwが大きいほど大きくなるように補正角度Δσを設定する(ステップS19)。そして、ECUは、摩擦限界舵角σ_fと補正角度Δσとの和を路面限界舵角σmaxとし(ステップS22)、前輪の転舵角σの絶対値が路面限界舵角σmax以下となるように転舵角調整制御を行なう(ステップS23)。
(もっと読む)
電動パワーステアリング装置
【課題】リヤトーコントロール装置が故障した場合に、操舵反力を付与し得る電動パワーステアリング装置の制御を適正にしてヨーモーメントの打ち消し易くする。
【解決手段】ステップ1で故障信号Sfの入力によってリヤトーコントロール装置11の故障が判定され(Yes)、ステップ6で左右の後輪5l,5rのトー角δrl,δrrが非対称と判定された場合(No)、故障時用のヨーレイト反力成分マップを参照してヨーレイト反力成分Tbγを正常時よりも大きく設定し(ステップ7)、故障時用の操舵角反力成分マップを参照して操舵角反力成分Tbθを正常時よりも小さく設定する(ステップ8)。
(もっと読む)
ステアリング制御装置、ステアリング制御方法
【課題】運転者のステアリング操作とは異なる所定の条件に基づいて転舵輪の転舵角を修正するときに、運転者に修正操舵を促す。
【解決手段】転舵角θwを自動修正するときには(ステップS22の判定が“Yes”)、この修正と同一方向の操舵反力Trを生成する。具体的には、修正量Δθに応じて付加反力Taを算出し(ステップS24)、この付加反力Taに応じて操舵反力Trを減少補正し(ステップS25)、この操舵反力Trに付加反力Taを加算することで(ステップS26)、最終的な操舵反力Trを生成する。このとき、修正量Δθが大きいほど、操舵反力Trを減少補正すると共に、付加反力Taを大きくする。一方、運転者のステアリング操作が速いほど、付加反力Taを小さくする。
(もっと読む)
ステアリング装置、ステアリング制御方法
【課題】路面反力の周波数特性に起因した、操舵反力の不足を補償する。
【解決手段】運転者のステアリング操作に応じて操向輪を転舵制御する際に、操向輪の路面反力を検出し、検出した路面反力に応じてステアリング操作系に操舵反力Trを付与するものであって、検出した路面反力に対して、車速Vが高いほどゲインを大きくし且つ位相を進ませる非干渉化フィルタ処理を実行することにより、ステアリング操作系に付与する操舵反力Trを、路面反力の周波数特性に応じて補償する。また、そのときの補償量を、ステアリング操作が切り増し時であるか切り戻し時であるかに応じて変更すると共に、所定の上限値以下に制限する。
(もっと読む)
挙動制御装置
【課題】車両の運転者がカウンターステアをおこなった時に車両の挙動に違和感を持つことを回避できる、挙動制御装置を提供する。
【解決手段】車両が旋回走行する際の目標ヨーレートを求め、車両が旋回走行する際の実ヨーレートを目標ヨーレートに近づけるように、車輪の転舵角を制御する挙動制御装置において、車両が旋回走行している際に外乱で発生した車両の挙動変化を修正するために、操舵角を減少させる方向にステアリング装置を戻すカウンターステアがおこなわれたか否かを判断するカウンターステア判断手段(ステップS3)と、カウンターステア判断手段(ステップS3)によりステアリング装置を戻すカウンターステアがおこなわれたと判断された場合は、その判断時点以前に求められていた目標ヨーレートを選択するヨーレート選択手段(ステップS4,S11,S5)とを備えている。
(もっと読む)
姿勢安定化制御装置及び該姿勢安定化制御装置を備えた車両
【課題】姿勢制御機能を有する車両の、悪路での乗り心地を改善する。
【解決手段】姿勢制御用のコントローラ103は、センサ群102から供給される路面状況に基づいて、車両の運動及び姿勢を制御するアクチュエータ131〜139の制御量を制御し、路面が悪路になると、姿勢制御のゲインを下げ、トルクを増加させることにより、サスペンションによらず、乗り心地を改善する。悪路の判定は、単位時間あたりの加速度の変動回数の検出、車輪の乗り上げの検出などにより行う。
(もっと読む)
41 - 60 / 375
[ Back to top ]