
Fターム[3D233CA12]の内容
パワーステアリング装置 (30,926) | 電気式パワーステアリング (28,865) | 電動機などの制御のための検出 (13,688) | 車両の運動状況 (4,070)
Fターム[3D233CA12]の下位に属するFターム
車両の速度 (3,122)
車両の加速度、横加速度 (573)
Fターム[3D233CA12]に分類される特許
21 - 40 / 375
後輪操舵装置
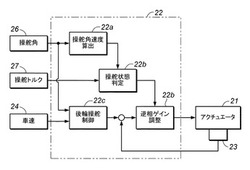
【課題】四輪操舵自動車で低速走行時にハンドル取られが生じた場合でも、車体の進行方向がハンドルが取られた方向へ助長されるのを抑制する。
【解決手段】操舵角速度算出部22aと、操舵角と操舵角速度とから操舵状態を判定する操舵状態判定部22bと、操舵角と車速とから後輪転舵の制御を決定する後輪転舵制御部22cと、操舵状態判定信号と後輪転舵信号とにより後輪の逆相制御のゲインを調整する逆相ゲイン調整部22dとを設け、操舵状態がハンドル取られ状態になったら逆相ゲインを小さくする。ハンドル取られによる車両の挙動が後輪の操舵増大により増大されてしまうことを抑制し得るため、低速走行時の前輪操舵走行状態でハンドル取られが生じても何等違和感が生じること無く運転し続けることができる。
(もっと読む)
電動パワーステアリング装置

【課題】別途センサを設けることなく、前輪軸に掛かる負荷の変化を検出して操舵系に与える操舵補助力を適正に補正する。
【解決手段】操舵系の操舵トルクを検出する操舵トルク検出部3と、操舵系に対して操舵補助力を発生する電動モータ12と、少なくとも操舵トルクに基づいて操舵補助指令値を算出する操舵補助指令値制御部21と、操舵補助電流指令値に基づいて前記電動モータを駆動制御するモータ制御部30と、操舵系の操舵角を検出する操舵角検出部13と、電動モータ12のモータ電流を検出するモータ電流検出部31と、操舵角とモータ電流との対応関係を表す基準操舵特性を記憶する基準特性記憶部23と、検出したモータ電流と操舵角とをもとに前記基準操舵特性を参照して前輪軸負荷を推定する軸負荷推定部22と、該軸負荷推定部22で推定した前輪軸負荷に基づいて前記操舵補助指令値を補正する指令値補正部24とを備えている。
(もっと読む)
操舵制御装置及び操舵制御方法
【課題】より高い転舵応答性の発揮及び駆動する部材の耐久性の低下抑制の両立を図る。
【解決手段】操舵制御装置は、転舵輪11L,11Rの目標転舵角と実転舵角との差分を基に、トルク指令値を算出するトルク指令値演算部61と、トルク指令値を基に、駆動電流値を算出する転舵指令電流演算部62と、駆動電流値を、第1及び第2転舵モータ32,43それぞれを駆動する第1及び第2モータ駆動電流値に配分する転舵電流配分演算部63と、第1モータ駆動電流値を基に第1転舵モータ32を駆動制御すると共に、第2モータ駆動電流値を基に第2転舵モータ43を駆動制御する第1及び第2転舵モータECU60,70と、直進走行状態に近いほど、第1モータ駆動電流値を大きく補正すると共に第2モータ駆動電流値を小さく補正するゲイン設定部64、乗算器65,66とを備える。
(もっと読む)
車両の操舵支援制御装置
【課題】ドライバ状態に応じて適切に警報感を与え、進行路を適切に維持するようにドライバを導きつつ制御して操舵支援する。
【解決手段】前方注視距離ztにおける目標通過点PcのX座標xc、推定通過点PeのX座標xeを基に目標ハンドル角θHtを算出し、現在のハンドル角θHが目標ハンドル角θHtとなる操舵トルクを第1の制御量T1としてフィードバック制御により算出し、自車両の運転状態を基に車両モデルにより目標進行路を走行するための操舵トルクを第2の制御量T2として算出して、覚醒度DA、或いは、漫然度DLに応じて全体の制御量Tcに対する第1の制御量T1と第2の制御量T2の制御割合を設定する。
(もっと読む)
車両用接触回避支援装置
【課題】自車と自車前方の障害物との位置関係に基づく接触余裕値を得、前記接触余裕値が閾値より小さく、かつ操向ハンドルの操作が検出されなかったとき、前記障害物に対する自車の接触回避支援を行う車両用接触回避支援装置において、バンク路の走行中に、接触回避支援処理が過剰に作動することを防止する。
【解決手段】自車10がバンクを有するカーブ路300を走行していると判断した場合には、接触回避ECUが、前方の障害物であるガードレール5との接触の可能性があると判断する接触余裕値の閾値を、より小さい値に設定するか、接触回避支援行わないようにする。
(もっと読む)
操舵制御装置及び操舵制御方法
【課題】車速が大きく高い応答性が求められる際には高い転舵応答性を確保するとともに、耐久性の低下抑制を図る。
【解決手段】操舵制御装置は、転舵輪11L,11Rの目標転舵角と実転舵角との差分を基に、トルク指令値を算出するトルク指令値演算部61と、トルク指令値を基に、駆動電流値を算出する転舵指令電流演算部62と、駆動電流値を、第1及び第2転舵モータ32,43それぞれを駆動する第1及び第2モータ駆動電流値に配分する転舵電流配分演算部63と、第1モータ駆動電流値を基に第1転舵モータ32を駆動制御すると共に、第2モータ駆動電流値を基に第2転舵モータ43を駆動制御する第1及び第2転舵モータECU60,70と、車速が小さいほど、第1モータ駆動電流値を小さく補正すると共に第2モータ駆動電流値を大きく補正するゲイン設定部64、乗算器65,66とを備える。
(もっと読む)
車両用運転操作補助装置、車両用運転操作補助方法および自動車
【課題】運転者に対し、より適切に車両の運転操作の補助を行うこと。
【解決手段】車輪と車体との間に介在された能動型のサスペンション装置と、車両周囲の障害物を検出する障害物検出手段と、障害物検出手段によって検出した障害物の種類を判別する障害物判別手段と、障害物判別手段の判別結果に基づいて、傾斜角を有する仮想路面を設定する仮想路面設定手段と、仮想路面設定手段によって設定した仮想路面の傾斜角と対応させて、能動型のサスペンション装置を制御し、車体を傾斜させる車体制御手段と、障害物検出手段によって検出した障害物への接近度合いに応じて、操舵反力を制御する操舵反力制御手段とを備える。
(もっと読む)
車両挙動制御装置
【課題】 センサ類に故障が生じた場合においても、過大な目標制御量の出力を抑制できるようにした車両挙動制御装置を提供する。
【解決手段】 制御量ベース値Dbaseの絶対値|Dbase|が配分トルクリミット値Tdlimを継続して超え、ステップS29の判定がYesとなった場合、ATTS−ECU16は、ステップS30で配分トルクリミット値Tdlimを目標制御量Dtgtとして処理を終了する。なお、この際、制御量ベース値Dbaseの値が負であった場合には、トルクリミット値Tdlimに−1を乗じることによって、目標制御量Dtgtの符号を制御量ベース値Dbaseに一致させる。
(もっと読む)
車両用路面反力推定装置
【課題】車両用路面反力推定装置において、駆動輪のセルフアライニングトルクを算出してから設定車両速度以上で路面反力を推定することで、路面反力を精度良く推定可能とし、また、車両が一定舵角の操舵時だけではなく、車両が動的に操舵している時でも路面反力を推定可能とする。
【解決手段】制御手段14は、車両速度検出手段15から検出される車両速度とハンドル切れ角検出手段16から検出されるハンドル切れ角とを用いてセルフアライニングトルクを算出する算出手段14Aと、車両速度検出手段15から検出された車両速度が予め設定された設定車両速度以上になった場合に算出手段14Aにより算出されたセルフアライニングトルクと予め設定された定数とに基づいて路面反力を推定する推定手段14Bとを備えている。
(もっと読む)
車両
【課題】簡易な操作により、超信地旋回を行うことが可能な車両を提供する。
【解決手段】2つの前輪(左前輪21及び右前輪31)と、前記前輪にそれぞれ連結され、前記前輪を操舵する操舵用アクチュエータ(左前輪操舵モータ23及び右前輪操舵モータ33)と、前記操舵用アクチュエータの動作を指示するステアリングホイール62と、ステアリングホイール62の回動角θに基づいて定められる旋回中心Z周りを旋回することが可能な前記前輪の操舵角(δFL及びδFR)をそれぞれ算出し、前記前輪の操舵角が算出された操舵角となるように前記操舵用アクチュエータを動作させるコントローラ100と、を具備した。
(もっと読む)
車両挙動センサの中点補正方法
【課題】中点学習を必要とし、車両走行中に中点学習を実施する車両挙動センサの誤学習の発生を抑制できる中点補正方法を提供する。
【解決手段】車両挙動センサの中点補正方法は、車両挙動センサの出力値から中点補正値が順次算出される中点補正算出工程と、中点補正値として略同等の値が連続して算出された場合には中点補正が実施され、前回の中点補正値と今回の中点補正値とが異なる場合には中点補正が実施されない中点補正判定工程とを有する。
(もっと読む)
舵角中点学習方法及び舵角反力制御方法
【課題】アイドルストップの直後から、運転者に与える違和感を少なく、舵角に応じたステアリングのアシスト制御が行える舵角中点学習方法を提供する。
【解決手段】所定条件によりアイドルストップを自動的に行うアイドルストップ機構を有する車両21に設けられる舵角センサ11の舵角中点を学習する舵角中点学習方法において、アイドルストップを行った場合は、アイドルストップ前に学習した舵角中点を記憶し、アイドルストップが解除されたときに、学習に替えて記憶された舵角中点を読み出す。ただし、アイドルストップ中に、操舵輪10の転舵方向にトルク変動があった場合は、記憶された舵角中点をキャンセルする。
(もっと読む)
センサの基準点補正方法
【課題】走行状態の車両と停車中の車両における周囲温度の変化の影響を好適に回避してヨーレートセンサの基準点を補正できる、センサの基準点補正方法を提供することを課題とする。
【解決手段】走行状態の車両が停車し、停車した状態で所定時間ΔTstが経過したときに1回だけヨーレート中点補正する。そして、走行状態になることなく、停車した状態のままで所定時間ΔTstが経過した後は、ヨーレート中点補正しないことを特徴とする、センサの基準点補正方法。
(もっと読む)
電動パワーステアリング装置
【課題】 電動モータ20やモータ駆動回路32の過熱保護と操舵フィーリングの急変防止とを両立させる。
【解決手段】 加速度センサ70により検出される加速度Gに基づいて、車両が加速状態となった回数をカウントするとともに、そのカウント値から一定時間以上加速状態とならなかった回数を減算する。この加減算されたカウント値に基づいて、カウント値が大きいほど、電動モータ20の上限電流値を下げる。従って、電動モータ20やモータ駆動回路32が過熱防止温度に到達する前から、電動モータ20の出力制限を徐々に行うことができるため、従来のように操舵アシスト制限の突然の開始により操舵フィーリングが急変してしまうといった不具合を生じない。
(もっと読む)
車両挙動センサの中点学習方法と車両挙動検出システム
【課題】車両挙動センサの温度変化の影響を回避して車両挙動センサの中点学習ができる車両挙動センサの中点学習方法と車両挙動検出システムを提供する。
【解決手段】VSA_ECUは、エンジンルーム内に設置され、ヨーレートセンサSYと、ヨーレートセンサ温度TYを検出する温度センサSTYを有する。エンジン制御ECUから吸気温度を外気温度TAirとしてCAN通信50を介して取得する。中点学習条件成立判定部42は、中点学習条件を満たしていると判定した場合に、中点決定部43に中点学習許可の信号を出す。中点決定部43は、ヨーレートセンサ温度TYと外気温度TAirとの差が、予め決められた閾値未満のときは、ヨーレートセンサSYからの信号を中点値として取得して、学習中点記憶部44に出力して、記憶させる。ヨーレートセンサ温度TYと外気温度TAirとの差が、閾値以上の場合は、中点値として取得しない。
(もっと読む)
車両の操舵装置
【課題】 簡単な構成で摩擦力発生装置の摩耗による摩擦力の低下を抑制するステアバイワイヤ方式の車両の操舵装置を提供すること。
【解決手段】 摩擦力発生装置20は、操舵入力軸12に対して相対回転不能かつ軸線方向に変位可能に組み付けられた第1磁性体リング21と、軸12に一体的に組み付けられた第2磁性体リング22とを備える。また、装置20は、リング21,22間に配置されて軸12と一体的に回転可能かつ軸線方向変位可能に組み付けられた2枚一対の非磁性体リング23,24と、リング23,24間に配置された永久磁石25とを備える。さらに装置20はリング21をリング22の方向に付勢するばね26を備える。これにより、装置20は磁石25の磁力とばね26の付勢力との合力に起因する摩擦トルクを発生させる。
(もっと読む)
車両用操舵装置
【課題】省エネルギを図ることのできる車両用操舵装置を提供する。
【解決手段】荷役用油圧アクチュエータとしてのリフトシリンダ31へ作動油を給排するための第1の油圧回路68と、操舵反力用油圧アクチュエータとしての油圧シリンダ13へ作動油を給排するための第2の油圧回路84とで、油圧源としての油圧ポンプ8、主供給路63の部分82、主排出路65の部分83および油タンク64を共用する。リフトシリンダ31が非作動状態にあるときに、切替弁としての操舵反力用制御弁57を切り替え、操舵反力用油圧アクチュエータとしての油圧シリンダ13を働かせる。荷役動作に支障をきたすようなことがない。
(もっと読む)
電動パワーステアリング装置
【課題】径方向に小型化できる電動パワーステアリング装置を提供すること。
【解決手段】電動パワーステアリング装置は、操舵部材に入力された操舵トルクを検出するためのトルクセンサと、トルクセンサを収容する筒状のハウジングとを備えている。トルクセンサは、合成樹脂部材62を含む。また、合成樹脂部材62は、集磁リング58が同軸的に埋設された筒状部64と、筒状部64の外周部に設けられた複数の取付部65と、複数の取付部65にそれぞれ形成され、対応する取付部65を筒状部64の軸方向X1に貫通する複数の取付孔67とを有する。合成樹脂部材62は、複数の取付孔67をそれぞれ挿通する複数の取付部材によってハウジングに同軸的に取り付けられる。
(もっと読む)
旋回制御装置及び旋回制御方法
【課題】旋回時に車輪にキャンバ角が付与されたときに、運転者が操舵装置の操作に違和感を覚えることがないようにする。
【解決手段】車両のボディと、複数の車輪と、所定の車輪にキャンバ角を付与するためのアクチュエータと、操舵装置と、操舵装置が操作されたときに、アシストトルクを発生させて操舵を補助する操舵補助装置と、アクチュエータを駆動して車輪にキャンバ角を付与するキャンバ制御処理手段と、車輪にキャンバ角が付与されたときに、アシストトルクを調整するアシストトルク調整処理手段とを有する。車両の旋回時に、車輪にキャンバ角が付与されると、アシストトルクが調整されるので、操舵装置の操作が重くなったり、軽くなったりすることがない。
(もっと読む)
車両の後輪トー角制御装置
【課題】舵角センサ等のセンサが失陥した場合の後輪トー角制御装置のフェールセーフアクションが、車両挙動を乱すことも、運転者に違和感を与えることもなく適切に行われるようにすること。
【解決手段】車両が旋回している状態では、後輪トー角を中立に戻すフェールセーフアクションを行わず、車両が直進走行している場合に限って後輪トー角を中立に戻すフェールセーフアクションを行う。
(もっと読む)
21 - 40 / 375
[ Back to top ]