
Fターム[3D233CA31]の内容
パワーステアリング装置 (30,926) | 電気式パワーステアリング (28,865) | 安全操舵装置 (852)
Fターム[3D233CA31]に分類される特許
1 - 20 / 852
電子制御装置、および、これを用いた電動パワーステアリング装置
車両用操舵装置
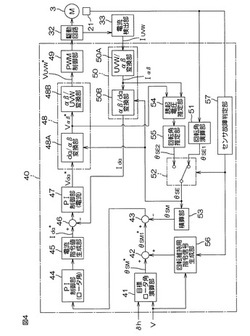
【課題】転舵用モータの回転角を検出するための回転角センサが故障した場合でも、転舵用モータの回転角を検出するための他の回転角センサを用いることなく、操舵制御を行なえるようになる車両用操舵装置を提供する。
【解決手段】センサ故障判定部57は、回転角センサ21の故障を検出すると、第1制御モードから、第2制御モードに、制御モードを切り換える。第2制御モード時には、回転角推定部55によって推定される第2のロータ角(電気角)θSE2に基づいて転舵用モータ3の実ロータ角(機械角)θSMが演算される。そして、この実ロータ角θSMが、目標ロータ角演算部41によって演算される目標ロータ角θSM*に回転角維持用指令信号が重畳された後の目標ロータ角θSM1*に収束するようにフィードバック制御が行なわれる。
(もっと読む)
車両用サスペンション装置、そのジオメトリ調整方法および自動車

【課題】車両前後方向の力に対するコンプライアンスステア特性をより適切なものとする。
【解決手段】車軸よりも車両上下方向の下側においてホイールハブ機構と車体とを連結し、車軸に沿って配置したトランスバースリンク部材と、車軸よりも車両上下方向の下側においてホイールハブ機構と車体とを連結し、車体との連結部がトランスバースリンク部材と車体との連結部よりも後方に位置すると共に、ホイールハブ機構との連結部がトランスバースリンク部材とホイールハブ機構との連結部よりも前方に位置するコンプレッションリンク部材と、トランスバースリンク部材およびコンプレッションリンク部材のホイールハブ機構との連結部よりも外側においてホイールハブ機構と連結し、該ホイールハブ機構との連結部よりも後側においてステアリングラック部材と連結し、車輪を転舵させるタイロッド部材とを有する車両用サスペンション装置とした。
(もっと読む)
電動パワーステアリング装置
【課題】1シャント式電流検出回路でモータ各相電流の検出を行うと共に、電流検出回路の故障(異常)を簡易な構成で確実に行い、安全性を高めた電動パワーステアリング装置を提供する。
【解決手段】インバータに接続された1つのシャント抵抗と、シャント抵抗の両端に正方向に接続され、モータの相電流を検出してアシスト制御の制御用モータ電流検出値とする制御用モータ電流検出回路と、シャント抵抗の両端に逆方向に接続され、制御用モータ電流検出回路の故障を検出するための診断用モータ電流検出回路とを具備し、1シャント式でモータの各相電流を検出してアシスト制御を行うと共に、シャント抵抗の両端電圧を増幅する回路を2系統とする。
(もっと読む)
四輪操舵制御装置
【課題】パワーステアリング装置が故障する場合に備えて、四輪操舵装置の後輪の転舵機能を利用して、車両の転舵ができる四輪操舵制御装置を提供する。
【解決手段】操舵部材2の操作に基づく操舵トルクを検出するトルクセンサ10と、操舵角を検出する操舵角センサ4と、トルクセンサ10の検出値に基づいて前輪を転舵するための補助力を得る操舵補助制御部31と、操舵角センサ4若しくはトルクセンサ10の検出値に基づいて後輪を転舵制御する転舵制御部41とを備え、転舵制御部41は、操舵補助制御部31の機能に故障があると判定された場合に、後輪を逆相側でのみ転舵制御する。
(もっと読む)
電動パワーステアリング装置
【課題】トルクセンサ、または電流センサの異常時においても、継続して安定したステアリング操作を行なうことのできる電動パワーステアリング装置を提供することにある。
【解決手段】ステアリングの操舵トルクを検出するトルクセンサと、操舵軸に加わる軸力を検出する軸力センサと、モータに流れる実電流を検出する電流センサとを備え、更に、トルクセンサ、軸力センサ及び電流センサの異常を検出する異常検出手段を有する。そして、上記異常検出手段により、軸力センサが正常、且つトルクセンサが異常の場合には、軸力センサにて、トルクセンサの値を推定する。また、軸力センサが正常、且つ電流センサが異常の場合には、軸力センサ及びトルクセンサにて、電流センサの値を推定することができる構成とした。
(もっと読む)
電子制御装置
【課題】電源電圧の低下および回復があった場合に、制御部と開閉手段を保護する。
【解決手段】電子制御装置100は、モータ駆動回路11と、電源リレー19と、制御部1と、コンデンサ20と、電源電圧検出部2と、モータ/コンデンサ電圧検出部23とを備える。制御部1は、電源リレー19をON状態にして、モータ駆動回路11の制御を開始した後、電源電圧検出部2で検出された電源電圧の低下を察知すると、モータ駆動回路11の制御を停止し、電源リレー19をOFFし、スリープモードに移行する。その後、制御部1は、電源電圧が上基準値以上で、かつ、電源電圧とコンデンサ20の電圧との電位差が所定値より小さいことを検出した場合に、スリープモードを解除した状態で、電源リレー19をONし、モータ駆動回路11の制御を再開する。
(もっと読む)
車両用制御装置
【課題】駆動システムの未始動時においても、車両ずり下がりを防止するための十分な制動力を発生させることができるとともに、十分な操舵アシスト力を発生させることができる車両用制御装置を提供する。
【解決手段】ハイブリッド車両に搭載される車両用制御装置であって、ハイブリッドシステムの始動および未始動を検出するHVECUを備え、HVECUが、ハイブリッドシステムの未始動時(ステップS1)に、シフトポジションセンサによりPレンジ以外のシフトレンジが検出され、かつ車速Vが発生したこと(ステップS2)を条件として、主バッテリと高圧回路とが電気的に接続されるようシステムメインリレーを制御する。
(もっと読む)
電動パワーステアリング装置
【課題】二重制御系統を備えた電動パワーステアリング装置において、サブマイクロコンピュータの実装を必要としない電動パワーステアリング装置を提供する。
【解決手段】制御装置5A,5Bを2系統有し、各制御装置5A,5Bは、相手系統の故障を推定する故障推定部56,66を備え、故障推定部56,66は、電動モータ1a,1bの出力値が目標指令値に収束する時間Teを監視し、この収束時間Teが基準時間γよりも長い場合に、他系の制御装置の故障を推定するものであり、他系の制御装置の故障を推定した正常側の制御装置は、正常側の制御装置の制御周期T0を短くしかつ制御ゲインK0を上げる制御を行う。
(もっと読む)
ステアリング装置
【課題】エアバッグを備えた車両のステアリング装置において優れた衝撃吸収性を発揮すること。
【解決手段】ステアリング装置1が、筒状のステアリングコラム17を軸方向X1に伸縮させて操舵部材2の位置を調整するテレスコピック機構Dを備える。ステアリングECUが、車両が衝突を予知したときにステアリングコラム17を最伸長位置に伸ばす。エアバッグ袋体33が膨張した後、シートベルトSBを装着している運転者HBが前方へ移動してくるときに、衝撃吸収機構Bの衝撃吸収ストローク量ST1に加えて、テレスコピック最大ストローク量ST2を衝撃吸収に寄与させる。
(もっと読む)
車両用操舵装置
【課題】電動パワーステアリング装置の異常によるアシスト停止後もステアリング操作により車両の旋回を継続できる車両用操舵装置を提供する。
【解決手段】ABS装置30は、電動パワーステアリング装置1のECU11の制御状態量である操舵トルクτを取得する(ステップS401)。異常検出信号Spsfの入力があるか否かを判定し(ステップS402)、異常検出信号Spsfの入力がある場合(ステップS402:YES)には、続いてステアリング操作中であるか否かを判定する(ステップS403)。ステアリング操作中であると判定した場合(ステップS403:YES)には、受信した操舵トルクτに基づき、所定の転舵輪7に付与する制動力を演算する(ステップS404)。ここで、通常時の制動力に演算された制動力分が補正される。そして、その制動力を制御指令として出力(ステップS405)し、ブレーキアクチュエータ31を制御する。
(もっと読む)
電動パワーステアリング装置
【課題】ステアリングホイールの操舵をアシストする通常制御時に、電源リレーのショート故障を診断することの可能な電動パワーステアリング装置を提供する。
【解決手段】電源からインバータ回路を経由してモータに電力を供給する配線に設けられた電源リレーは、異常時に電源からインバータ回路への通電を遮断する。マイコンは、ステアリングホイールの操舵をアシストする通常制御時に、ステアリングホイールが操舵されていないとき(S4:NO)、電源リレーのショート故障を診断する。EPSは、ステアリングホイールの操舵がされていない時に電源リレーにより通電を遮断することで(S5)、ステアリングホイールの操舵のアシストに影響を与えることなく、電源リレーのショート故障を診断することができる。
(もっと読む)
走行制御装置および車両
【課題】車両の進行先の影響を考慮しつつ、運転者に安心感を与えながら物体の衝突回避を行うことができる走行制御装置および車両を提供すること。
【解決手段】車両1の進路方向における仮想バンパー領域71を広く設定する。これにより、車両1の進行先にある物体80との衝突回避を確実に行うことができる。一方、車両1の進行方向とは異なる方向においては、仮想バンパー領域71が車両1の進行方向と比して相対的に狭く設定されるので、車両1の進行方向とは関係のない場所にある物体との衝突回避動作を抑制できる。よって、車両1の進行先の影響を考慮しつつ、運転者に安心感を与えながら物体80の衝突回避を行うことができる。
(もっと読む)
車線逸脱防止装置
【課題】運転者への車線逸脱の報知と逸脱防止トルクの付与とを両立して、より確実に車両の走行車線からの逸脱を防止することが出来る車線逸脱防止装置を提供する。
【解決手段】本発明による車線逸脱防止装置(1)は、車両の走行車線からの逸脱を予測し又は逸脱を検出する車線逸脱検出手段(26)と、車両の走行車線に対する逸脱方向を検出する逸脱方向検出手段(26)と、車両のステアリング(2)に左右方向の振動トルクを与える振動トルク付与手段(8)と、を有し、振動トルク付与手段は、車両の走行車線からの逸脱が検出され又は逸脱が予測されるとき、ステアリングにそのときの舵角を中立位置とする左右方向の振動トルクを付与すると共に、検出された逸脱方向と反対方向側の振動トルクの付与時間を逸脱方向側の振動トルクの付与時間より長く付与する。
(もっと読む)
農業用トラクタ
【課題】農業用トラクタにおいて、操舵トルクセンサが故障しても確実に操舵力補助制御を継続できるようにする。
【解決手段】農業用トラクタは、エンジンが搭載され且つ前後四輪にて支持された走行機体と、走行機体に設けられた操縦ハンドルと、電動モータ84を有する電動操舵機構と、操縦ハンドルの操舵トルクを検出する操舵トルクセンサ85とを備える。操舵トルクセンサ85の検出結果に基づき電動モータ84の出力を増減させ、電動操舵機構を介して左右両前車輪を操舵する。走行機体の前後方向の傾斜角を検出するピッチングセンサ104を備える。ピッチングセンサ104の検出結果に基づき電動モータ84の出力を調節可能に構成する。
(もっと読む)
制御装置、リーチ式フォークリフトおよびプログラム
【課題】運転者に違和感を与えたり危険を及ぼしたりする可能性のある状態であることを、事前に運転者へ通知できるようにする。
【解決手段】操舵モードをロックモードへと切り替えるための操作が運転者により行われた際(s120「YES」)、操舵輪53の操舵角がロック角以上になっていると、切替条件が満たされていないとしてロックモードへの切替を保留するとともに(s130「NO」)、切替条件が満たされていないことを通知することができる(s140)。
(もっと読む)
車両の操舵制御装置及び操舵制御方法
【課題】転舵モータの過熱時に操舵輪と転舵輪とを機械的に結合しても、運転者が負担する操舵トルクの増加を抑制することが可能な、車両の操舵制御装置及び操舵制御方法を提供する。
【解決手段】操舵輪32の操作に基づいて転舵輪24を転舵させる転舵モータ2の温度が、予め設定したクラッチ締結温度を超えているか否かを判定し、転舵モータ2の温度がクラッチ締結温度を超えていると判定すると、操舵輪32と転舵輪24との間のトルク伝達経路を機械的に分離する開放状態にあるクラッチ6を、トルク伝達経路を機械的に連結した締結状態に切り換えた後も、操舵輪32の操作に応じた目標転舵角を算出し、この算出した目標転舵角に応じて転舵トルクを制御する転舵モータ2の駆動制御を継続させる。
(もっと読む)
冗長機能付きステアバイワイヤ式操舵装置の制御装置
【課題】 転舵用のメインモータの失陥および制御装置の故障に対する冗長性確保のための多重化と、平常時は多重化部分を利用した高機能化を両立したステアバイワイヤ式操舵装置の制御装置を提供する。
【解決手段】 メインモータを切り離しサブモータの回転を伝えて転舵可能なフェールセーフモードとする切替機構17を有する。第1の制御装置101は、反力アクチュエータ4とサブモータ7を制御する。第2の制御装置201は、メインモータ6を駆動する。第1の制御装置101は、異常時切替指令部106を有し、メインモータ6が失陥であるとの診断結果を受けたとき、および相互故障診断部103で第2の制御装置201が故障であると診断したときに、切替機構17をフェールセーフモードとする。
(もっと読む)
電動パワーステアリング装置
【課題】モータ回転角センサの異常時においても、継続して安定したステアリング操作を行なうことのできる電動パワーステアリング装置を提供すること。
【解決手段】モータ回転角センサ(24)の異常が検出された場合には、モータ回転角にかえて、ステアリングシャフト(3)の回転角で、モータ(12)を駆動制御する。更に、前記ステアリングシャフト(3)の回転角は、モータ(12)の回転角に対して、トーションバー(17)の捻れ分だけ位相が進んでいるので、トーションバー(17)の捻れ分だけステアリングシャフト(3)の回転角の位相を遅らせる補正を行なう。
(もっと読む)
電動パワーステアリング装置および車両用制御装置
【課題】急発進する必要がある場合により早く発進できる状態とすることができる技術を提供する。
【解決手段】操舵トルクを検出するトルクセンサと、電動モータ110と、ステアリングホイールの操作角度を検出する操舵角センサと、車両に設けられ予め定められた停止条件が成立した場合にエンジンを自動的に停止させるとともにエンジンが停止している状態で予め定められた始動条件が成立した場合にエンジンを自動的に再始動させるエンジン制御装置6に対して、予め定められた停止条件が成立した場合であってもエンジンの停止を禁止する旨を要求し、および/または予め定められた始動条件が成立していなくてもエンジンの再始動を要求するモータ制御部40と、を備え、モータ制御部40は、操舵トルクが基準トルクを超えている場合、あるいは操作角度が基準角度を超えている場合には、エンジンの停止を禁止する旨を要求、またはエンジンの再始動を要求する。
(もっと読む)
1 - 20 / 852
[ Back to top ]