
Fターム[3D244AA17]の内容
Fターム[3D244AA17]の下位に属するFターム
惰性走行 (23)
Fターム[3D244AA17]に分類される特許
1 - 20 / 56
先行車追従走行装置及び運転支援システム
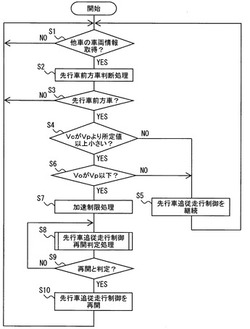
【課題】先行車追従走行を行うものにおいて、燃費の悪化をより抑制することを可能にする。
【解決手段】先行車の速度と、車車間通信で取得した先行車と同一道路上の先行車の進行方向前方に位置する先行車前方車の速度情報とをもとに、当該先行車前方車の速度が先行車の速度よりも所定値以上小さいか否かを判定する。そして、肯定判定した場合であって、且つ、自車の速度が先行車の速度以下の場合には、先行車追従制御を中断し、自車の速度を維持することで加速を抑制する。
(もっと読む)
車両制御装置

【課題】全加減速シーンにおける加速性能を低下させることなく、エネルギー効率の向上を図る。
【解決手段】目標加減速度Adと、境界加減速度Anのうち目標加減速度Adに最も近い境界加減速度Amとの差分が加速度規定範囲ΔAd内か否かを判定し、目標加減速度Adと境界加減速度Anに基づいて新たにエンジンの駆動が必要と判定した場合でも、目標加減速度Adと、境界加減速度Anのうち目標加減速度Adに最も近い境界加減速度Amとの差分が加速度規定範囲ΔAd内であると判定された場合、目標加減速度Adを駆動中のモータにより実現可能な加速度に変更する。
(もっと読む)
運転支援装置
【課題】燃費を向上させるための車両の運転支援装置を提供する。
【解決手段】自車両のアクセル開度を検出する手段と、アクセル開度の時系列データに基づいて、該アクセル開度の自己相関関数を算出する手段136と、自己相関関数の値に基づき、自車両のアクセル操作の周波数を算出する手段137と、自車両の加速度を検出する手段と、加速度の周波数分析から周波数に対応するパワースペクトルを算出する手段131と、パワースペクトルの単回帰直線を演算し、所定周波数範囲での当該単回帰直線の傾きの変化量の極大値を傾き極大値として算出する手段133と、を備える、燃費を向上させるよう車両の運転を支援するための装置である。この装置は、アクセル操作の周波数が所定値よりも低く、かつ傾き極大値が自車両前方での渋滞予兆を示す場合に、運転支援をおこなう。
(もっと読む)
車両の駆動装置
【課題】車両の走行状態に応じて適切に蓄電装置の放電電流を制御する車両の駆動装置を提供する。
【解決手段】車両の駆動装置は、車輪を回転させる電動機と、蓄電池を含む蓄電装置と、蓄電池に圧力を加える圧力調整装置と、車両の周辺情報を検出する周辺情報検出装置と、車両の周辺情報に基づいて車両の走行状態を制御する走行制御装置とを備える。蓄電池は、正極層、電解質層および負極層の積層体を含み、正極層、電解質層および負極層が粉体により形成されている。走行制御装置が車両の走行状態を制御すべきときに、蓄電池に加える圧力を調整することにより、蓄電池の放電電流の最大値を調整する。
(もっと読む)
クルーズコントロールシステム
【課題】先行車両の停止による自車両の停止時に適切にアイドルストップを実行可能とし、アイドルストップによる燃費低減や排気エミッションの低減を有効に活用する。
【解決手段】ACC制御中で自車両が停止した場合(S2)、自車両の停止保持状態をブレーキ圧やEPBの作動によって確認し(S3)、さらに、アイドルストップ実行条件が成立するか否かを調べる(S4)。そして、アイドルストップ実行条件が成立する場合、ACC制御ユニットからアイドルストップ制御ユニットにエンジン停止指令を出力し、エンジンのアイドル運転を停止させ、エンジンを自動停止させる(S5)。これにより、先行車両の停止による自車両の停止時に適切にアイドルストップを実行可能とし、アイドルストップによる燃費低減や排気エミッションの低減を有効に活用することができる。
(もっと読む)
渋滞状態判定装置及び車両制御装置
【課題】渋滞中心区間を走行している状態を高精度に検出することを可能とする渋滞状態判定装置、及びその渋滞状態判定結果に基づいて無駄な加速を抑制し、燃費を向上することを可能とする車両制御装置を提供することを目的とする。
【解決手段】本発明に係る渋滞状態判定装置20は、車両の速度を取得する速度情報取得部21と、速度情報取得部21により取得された車両の速度の変動の振幅が所定範囲で、かつ速度の変動の周期が所定の範囲内で加減速運転している状態を検出した場合に、車両が渋滞中心区間を走行中であると判定する走行区間判定部22を備える。また、本発明に係る車両制御装置1は、上記渋滞状態判定装置20と、渋滞状態判定装置20の判定結果に基づいて追従性を切り換える車両制御部23を備える。
(もっと読む)
車両の駆動制御装置
【課題】駆動側が遠心式のベルト式無段変速機と電子スロットル部とを備える構成で、電子スロットル部のモードに合わせた適切なドリブン推力を設定し、燃料の節約を図ることができる車両の駆動制御装置を提供する。
【解決手段】電子スロットル制御部31は、選択された運転モードに応じて吸気絞り弁21の開度を制御し、従動側接圧力可変部36は、所定車速を越えると、又は、スロットルグリップ26の開度が一定の状態が継続すると、従動プーリー51とベルト45との接圧力を低減させるようにした。
(もっと読む)
車速制御システム
【課題】オートクルーズによる運転をより円滑に行うことが可能となるシステムを提供する。
【解決手段】車速制御装置は、オートクルーズにより自車両の車速を目標速度に維持した状態で運転が行われている際に、現在の燃料の残量により目的地まで到達できないことが判明すると(S325:Yes)、ナビゲーション装置により目的地までのエコルートを探索させる。そして、燃料を効率良く消費できる低燃費速度でエコルートを走行した際に、現在の燃料の残量で目的地まで到達可能か否かを判定し、到達可能と判定した場合には(S350:Yes)、低燃費速度を推奨速度として提示し(S355)、ドライバに対し、低燃費速度を目標速度として設定するように促す。
(もっと読む)
車両用走行制御装置
【課題】クルーズ走行などの自動走行に移行する際に、運転者に与える違和感を抑えることを可能とする。
【解決手段】運転者によるステアリングスイッチ28の操作によって定速走行に移行する際に、エンジン停止の処理中若しくはエンジン停止処理に移行したと判定すると、EVモードに移行することなく、エンジンを運転状態に復帰させる処理を行う。
(もっと読む)
車両用走行制御装置及び車両用走行制御方法
【課題】定速走行制御時における頻繁なエンジンの始動・停止が行われるのを防ぐこと。
【解決手段】駆動輪7L,7Rに駆動力を伝達する駆動源としてエンジン1及びモータジェネレータ2を有するハイブリッド車両において、走行速度をステアリングスイッチで設定された目標速度を維持するように自動調整する定速走行制御を行っているとき、エンジン1の始動後モータジェネレータ2の駆動源であるバッテリが設定したクルーズ時SOC停止判定値に充電されるまでの間、エンジン1の停止を禁止する制御を行う。
(もっと読む)
車両の制御装置
【課題】車速を目標車速に制御するクルーズコントロールが実行可能な車両において、クルーズコントロール実行中のエネルギ消費を抑制して効率を高める。
【解決手段】クルーズコントロール時にはドライバが継続的な定速走行を希望しており、回生による制動力を発生させる必要がない点に着目し、クルーズコントロール時に定速走行管理範囲(具体的には、許容下限値M≦[加速度α]≦許容上限値N、及び、許容下限値m≦[車速V]≦許容上限値の範囲)内で惰行走行状態を作り出すことにより、エネルギの消費を低減するとともに、エネルギの電気パス通過分を抑制してエネルギ損失を低減する。
(もっと読む)
車間距離制御装置
【課題】先行車両と自車両との車間距離が基準車間距離を超えている場合において、燃料消費率の改善を図る。
【解決手段】ECU4は、車速センサ3が検出する車両1の速度に応じた基準車間距離を算出し、レーダセンサ2が検出する先行車両と車両1との検出車間距離と比較する。検出車間距離が基準車間距離以下の場合は基準車間距離を目標車間距離として車間距離制御を行い、検出車間距離が基準車間距離を超えている場合は基準車間距離を延長した延長車間距離を目標車間距離として車間距離制御を行う。
(もっと読む)
車両制御システム
【課題】設定された車速を目標車速として車速を自動制御する場合の燃費を向上可能な車両制御システムを提供する。
【解決手段】車両の動力源と駆動輪との間で動力を伝達する流体伝達機構と、流体伝達機構と並列に設けられ、流体伝達機構を介さずに動力源と駆動輪とを機械的に接続する係合状態と、機械的に接続しない開放状態とに切替え可能で、かつ開放状態で車両の車速が第一車速以上となった場合に係合状態に切り替わるロックアップ装置とを備え、運転者により設定された第二車速を目標車速として車速を自動制御する所定走行制御(S1肯定)において、第二車速が第一車速よりも低い車速であり(S2肯定)、かつロックアップ装置が開放状態である(S3肯定)場合、車速を第一車速以上の車速まで上昇させる加速制御を実行し(S4)、加速制御によりロックアップ装置が係合状態に切替わった後に第二車速を目標車速として車速を制御する。
(もっと読む)
車両制御装置
【課題】駆動源としてエンジンとモータを用いる車両において、先行車に追従走行している時に先行車が加速した場合の燃費を抑制することができる車両制御装置を提供する。
【解決手段】駆動源としてエンジンとモータを用いる車両において、先行車までの距離を検出する車間距離検出手段と、前記先行車との相対速度を検出する相対速度検出手段と、前記相対速度検出手段によって検出された相対速度を微分し、相対加速度を算出する相対加速度算出手段と、自車速度を検出する自車速検出手段と、前記車間距離検出手段と前記相対速度検出手段と前記相対加速度検出手段と前記自車速検出手段によって検知された車間距離、相対速度、相対加速度、自車速度にもとづいて、先行車に追従するために必要な前記モータの出力トルクを算出する出力トルク算出手段と、前記出力トルク算出手段で算出されたトルクを出力するように前記モータを制御する制御手段とを備えた構成とする。
(もっと読む)
走行支援装置
【課題】本発明は、他車両の走行状態に基づいて自車両の適切な加速度を設定する走行支援装置を提供することを課題とする。
【解決手段】車車間通信で取得した他車両の走行状態に基づいて自車両の目標速度を設定する走行支援装置1であって、車車間通信で走行状態を取得できた他車両の台数の増加に応じて大きな加速度を設定する加速度設定手段51と、加速度設定手段51で設定した加速度に基づいて目標速度を設定する目標速度設定手段51を備えることを特徴とする。
(もっと読む)
車両走行制御方法
【課題】
「交差点無停止走行制御システム」における地点P通過前後の車両走行速度差に起因する走行安全・渋滞問題の解決、及び地点P−交差点A間走行時の車両運動エネルギーの効率的利用方法、回生方法の提案。
【解決手段】
車両の地点P通過実車両走行速度 vs 、地点P−交差点A間車両走行距離D、交差点A信号状態情報、地点P通過時刻 tp 、から交差点A到着予定時刻 ta を算出し、地点P−交差点A間を等加速度走行して前記交差点A到着予定時刻 ta に交差点Aに到着するための加速度αを算出して加速度αでの定加速度走行で、但しα<0(減速度走行)の場合は惰性走行を行い惰性走行に余る運動エネルギー分は回生ブレーキの調整による減速度αでの定減速度走行で、交差点Aに向けて走行し交差点Aを青信号・無停止で通過する。
(もっと読む)
車両走行速度制御方法
【課題】
「交差点無停止走行制御システム」における地点P通過前後の車両走行速度差に起因する走行安全対策およびエネルギー消費量・排出ガス量削減効果の一層の向上。
【解決手段】
車両は地点P通過時に、地点Pにおいて、地点P通過時刻、地点Pより交差点Aまでの
走行距離D、地点P−交差点間許容最高速度Vmax、地点P通過時刻、および交差点Aを
青信号・無停止で通過するための交差点Aへの到達設定時刻ta 、の各情報を得るとともに、
地点P通過後の経過時間Δt 、走行距離ΔDの計数を開始し、
その後地点P通過後一定時間Tc経過毎に推奨走行速度voptn(但し、n:0、1、2、
3、・・・、vopt0:地点P通過時の推奨走行速度)を算出して、前記voptn がその時点、の自車速vsnに対して、vsn >voptn であれば惰性走行、またvsn ≦voptn であればvoptn による推奨走行速度走行、で交差点に向けて走行し、交差点Aを青信号・無停止で通過する。
(もっと読む)
車両クルーズコントロールを制御する方法及びシステム
本発明は、車両クルーズコントロールを制御する方法であって、前記方法は、クルーズコントロールを作動状態にすると共に、車両設定目標速度(Vcc設定目標速度)を維持するように設定して、車両を運転するステップと、坂の上り坂を走行中に、車両の減速によって、車両設定目標速度より低い第1車速(Vmin)まで車速が低下し、しかも減速が0に減少した、又は車両設定目標速度まで車速を高めるために車両が加速し始めた第1車両位置(A)を登録するステップと、頂上から第1距離(y1、y2)を過ぎた地点での、頂上から下り坂の第2位置(C1、C2)における所望の車速(Vbcc超過速度)を登録するステップと、前記所望の車速に基づいて、第1距離(y1、y2)を走行中に最小限化又はゼロ燃料消費で、所望の車速に達することができるように、車両が頂上を通過しなければならない、頂上での車両最低速度(Vmin1、Vmin2、Vmin3)を計算するステップと、車両が、頂上を通過するとき車両最低速度(Vmin1、Vmin2、Vmin3)に達するように、第1車両位置(A)から頂上(B)までの第2距離(x)を走行中の車速を制御するステップとを含む。 (もっと読む)
トラクタ
【課題】本発明では、作業中のエンジン回転数を負荷変動に応じて素早く最適燃費ラインの回転数に近づけるようにすることで、燃料消費量が少ないトラクタの走行制御装置を提供することを課題とする。
【解決手段】アクセルレバー33或はアクセルペダル34の開閉度合いを検出するスロットルセンサ20と、エンジン2の出力軸の回転数を検出するエンジン回転センサ22を設けると共に、前記スロットルセンサ20の検出開度に応じた最適回転数を制御装置40に記憶し、前記エンジン回転センサ22が検出するエンジン回転数とスロットルセンサ20の検出開度に応じた最適回転数の差を所定範囲に収めるように、エンジン回転制御部27と主変速制御部28とPTO変速制御部29を制御するように構成したことを特徴とするトラクタの構成とする。
(もっと読む)
アクセルペダル反力制御装置
【課題】電気的に制御されるアクチュエータによる消費電力を抑制することが可能なアクセルペダル反力制御装置を提供する。
【解決手段】アクセルペダル反力制御装置12は、電気的に制御されるアクチュエータ28によりアクセルペダル14に反力Frを付与する。アクセルペダル反力制御装置12は、車両10が定速走行しているとき、反力Frを減少させる。
(もっと読む)
1 - 20 / 56
[ Back to top ]