
Fターム[3D244AA36]の内容
定速走行制御 (7,912) | 目的 (1,793) | 危険回避、安全性向上 (673) | 警報 (134) | 制限車速、設定車速超過時 (34)
Fターム[3D244AA36]に分類される特許
1 - 20 / 34
車両の走行制御装置
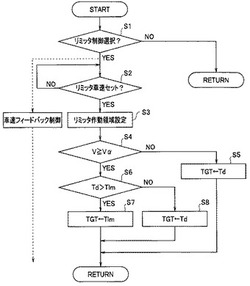
【課題】車速制限制御に切り換えられた際に、自車両の車速を制限車速に滑らかに収束させると共に、不自然な変速を防止する。
【解決手段】自車両の車速リミッタ作動領域に入っているか否かを調べ(S4)、リミッタ作動領域内に入った場合、ドライバのアクセル操作に基づくドライバ要求トルクTdとリミッタ制御のリミッタ要求トルクTlmとを比較し(S6)、Td>Tlmの場合、リミッタ要求トルクTlmを目標トルクTGTとして設定し(S7)、Td≦Tlmの場合、ドライバ要求トルクTdを目標トルクTGTとして設定し(S8)、自車両の車速をリミッタ車速に円滑に収束させる。また、このとき、クルーズ制御における仮想アクセル開度を用いてリミッタ制御時の変速を制御することで、不自然な変速を防止する。
(もっと読む)
車両の走行制御装置

【課題】車速制限制御の開始タイミングを適正化してドライバに対する違和感や車速超過を抑制する。
【解決手段】自車両の車速がリミッタ車速に向かって上昇していくとき、加速度の大きい場合は早めにリミッタ制御を開始させることで車速超過を抑え、緩やかな加速の場合はなるべくリミッタ制御が介入しないようにしてドライバの意図に沿った運転を可能とする、また、ドライバのアクセル操作による要求トルクからリミッタ制御の要求トルクへの大きなトルク変動が予想される場合には、トルクの繋がりを滑らかにして目標トルクとなるまでに要する時間を考慮し、リミッタ制御の介入タイミングを調整する。そして、最終的に、少なくとも加速度による要因とトルク変動の要因とを総合的に判断してリミッタ作動領域を設定することにより、車速制限制御の開始タイミングを適正化してドライバに対する違和感や車速超過を抑制することができる。
(もっと読む)
車両用走行制御装置
【課題】 ドライバの加速意図を反映しつつドライバの違和感を抑制することができる車両走行制御装置を提供すること。
【解決手段】 車両がカーブ路を走行する際、カーブ路の曲率に基づいて算出された目標車速V0*となるように車両を加減速制御し、加減速制御中にドライバのアクセルペダル操作が検出されると、検出されたアクセルペダル操作量(アクセル開度AP)に基づいて目標車速V0*を修正するとともに、目標車速V0*により発生する車両の横加速度αyよりも大きい横加速度を許容する許容車速Vuprよりも高くならないように目標車速V*を制限し、目標車速V*の制限中に許容車速Vuprが上昇した場合、アクセルペダルの操作反力Fを発生させると共に、アクセルペダル操作が検出されなくなるまで、加減速制御における車両の加速度を、許容車速Vuprを実現する加速度αy'よりも小さくなるように制限する。
(もっと読む)
走行制御装置
【課題】自車走行路の制限速度を的確に推定する。
【解決手段】フロントカメラ4およびリアカメラ5による撮像画像情報を画像処理し、走行車線の幅員、走行車線の左右の区画線の線種、左側の歩道と車道外側線部間(路肩)の幅員、中央帯の幅員などを検出する。これら情報とナビゲーション装置2からの道路種別情報とから自車走行路の“道路の区分”を予測し、この“道路の区分”に対して予め規定されている設計速度を推定する(ステップS1〜S5)。さらに、ナビゲーション装置2から道路勾配および道路曲線半径情報を獲得し、自車走行路の道路勾配および道路曲線半径に対して予め規定されている設計速度を推定する(ステップS6、S7)。そして、“道路の区分”および道路勾配、道路曲線半径に基づき推定した設計速度から自車走行路の設計速度を推定し、これを自車走行路の推定制限速度とする(ステップS8)。
(もっと読む)
走行制御装置
【課題】増速変化地点の手前で、先行車両との流れに合わせて車速を制御する。
【解決手段】走行制御用コントロールユニットは、制限速度の増速変化地点の手前のサイン認識可能区間内に車両Aが進入してからは、自車速度Vcと将来制限速度Vnlとの差に基づいて制駆動力を制御するようにした。それゆえ、車両Aの進行方向に制限速度の増速変化地点が存在する場合には、先行車両Bの制限速度の増速に追従するように車両Aを加速させることができ、先行車両Bと車両Aとの車速差を低減できる。そのため、先行車両Bとの流れに合わせて車両Aの車速を制御できる。
(もっと読む)
車速制限制御装置
【課題】車速制限制御に用いる制限車速を大きく変更しなければならない場合であっても、簡単な操作で、その変更を行うことが可能な車速制限制御装置を提供すること。
【解決手段】複数の制限速度を記憶可能な記憶装置3を有し、運転者によって操作される選択操作スイッチにより、車速制限制御に用いる制限速度VLとして、記憶装置3に記憶された複数の制限速度VMの中からいずれかの制限速度を選択する。このため、制限速度VLを大きく変更しなければならないような状況においても、予め、変更後の制限速度に対応する制限速度を記憶装置3に記憶させておくことで、その記憶した制限速度を選択するという簡単な操作で、制限速度VLの変更を行うことが可能となる。
(もっと読む)
車両用走行制御装置および車両用走行制御方法
【課題】道路状況に応じた設定車速を設定する。
【解決手段】自車両の速度が設定車速と一致するように車両を制御する装置において、自車両が走行している道路の制限速度を取得し、取得した制限速度が第1の制限速度から第2の制限速度に変化した場合に、設定車速を第2の制限速度に変更する。ドライバが前記操作手段を操作することによって前記設定車速を変更してから所定時間以内は、前記制限速度取得手段によって取得した制限速度が前記第1の制限速度から前記第2の制限速度に変化した場合でも、前記設定車速を前記第2の制限速度に変更する処理を抑制する。制限速度が前記第1の制限速度から前記第2の制限速度に変化したことをドライバに報知する。
(もっと読む)
車速制御システム
【課題】オートクルーズによる運転をより円滑に行うことが可能となるシステムを提供する。
【解決手段】車速制御装置は、オートクルーズにより自車両の車速を目標速度に維持した状態で運転が行われている際に、現在の燃料の残量により目的地まで到達できないことが判明すると(S325:Yes)、ナビゲーション装置により目的地までのエコルートを探索させる。そして、燃料を効率良く消費できる低燃費速度でエコルートを走行した際に、現在の燃料の残量で目的地まで到達可能か否かを判定し、到達可能と判定した場合には(S350:Yes)、低燃費速度を推奨速度として提示し(S355)、ドライバに対し、低燃費速度を目標速度として設定するように促す。
(もっと読む)
運転支援装置
【課題】渋滞区間の交通流を改善する運転支援装置を提供することを課題とする。
【解決手段】渋滞区間における運転支援を行う運転支援装置であって、渋滞区間の平均速度を取得する平均速度取得手段と、平均速度取得手段で取得した渋滞区間の平均速度より高い速度を渋滞区間における上限速度として設定する上限速度設定手段と、上限速度設定手段で設定した渋滞区間における上限速度に基づいて運転支援(例えば、速度制御、情報提供)を行う運転支援手段とを備えることを特徴とし、渋滞区間において運転支援装置を搭載する車両が走行している割合を取得する走行割合取得手段を備え、上限速度設定手段は、走行割合取得手段で取得した走行割合に応じて上限速度を設定すると好適である。
(もっと読む)
車両制御装置
【課題】自車両の車速制限制御の解除要否を状況に応じて適切に判断することができる車両制御装置を提供する。
【解決手段】車両制御装置のECUは、自車両の減速支援を開始した後、後方物体センサの検出信号に基づいて後方車両が自車両に接近中であるかどうかを判定し、後方車両が自車両に接近中でないと判定されると、自車両の減速支援を解除するための解除閾値を高い値に設定し、後方車両が自車両に接近中であると判定されると、解除閾値を低い値に設定する。そして、ECUは、アクセル開度センサの検出信号に基づいて自車両のアクセル開度の絶対値または変化量を取得し、アクセル開度の絶対値または変化量が解除閾値よりも大きいと判定されたときは、自車両の減速支援を解除する。
(もっと読む)
運転支援制御装置
【課題】運転支援制御装置により、走行条件に応じた運転者の嗜好や技量に適応した円滑な車両走行を実現する。
【解決手段】運転支援制御装置において、ユーザ入力により、予め運転支援制御設定が入力される。車速設定入力画面においては、リンク400における設定車速として、たとえば「40km/h」が設定される。条件設定入力画面においては、このリンク400に対する車速設定および条件設定の組合せの有効期間、該組合せの適用対象の時間帯、および該組合せが適用される天候条件および路面状態の条件が各々設定される。運転支援制御設定に従って、車両走行時に車両制御処理が行われる。運転支援制御装置は、設定した条件に基づき設定車速の超過を検出したとき、運転者に減速を促す警告を報知すると共に、ECUに速度超過を通知してスロットル開度の低減等が行われるようにする。
(もっと読む)
車速制御装置
【課題】路面の摩擦係数が低い状況で車速制御を行う場合に、制駆動力制御が頻繁に繰り返されることを防止し、路面状況に応じた適切な車速制御を行う。
【解決手段】車速制御装置は、運転者などにより設定された設定速度を超えないように車両の速度を制御し、一旦設定された設定速度を変更する手段を備える。制駆動力制御は、車両挙動安定化制御又はトラクション制御の少なくとも一方である。制駆動力制御が実行された場合には、変更手段により設定速度が変更される。路面摩擦係数が低く滑りやすい路面などを車速制御しながら走行中に、制駆動力制御が実行された場合には、路面状況などに対して設定速度が高すぎると推測し、設定速度を変更する。これにより、車速が設定速度に到るまで運転者がアクセルを踏み続けることにより、頻繁に制駆動力制御が作動することが防止される。
(もっと読む)
車両用運転支援装置
【課題】運転者の運転感覚に合致した最適な自動減速制御を行なうことが可能な車両用運転支援装置を提供すること。
【解決手段】車両が特定の位置を走行する際に自動減速制御を行なう制御手段を備える車両用運転支援装置であって、運転者のアクセル操作を検出するアクセル操作検出手段と、前記運転者のブレーキ操作を検出するブレーキ操作検出手段と、を備え、前記制御手段は、前記アクセル操作検出手段及び前記ブレーキ操作検出手段の検出結果を参照して前記運転者が一連の特定操作を行なったと判定した場合に、該一連の特定操作に含まれる操作の行なわれたタイミングを学習し、該学習したタイミングに基づいて、前記自動減速制御の制御区間を決定することを特徴とする、車両用運転支援装置。
(もっと読む)
車両クルーズコントロールを制御する方法及びシステム
本発明は、車両クルーズコントロールを制御する方法であって、前記方法は、クルーズコントロールを作動状態にすると共に、車両設定目標速度(Vcc設定目標速度)を維持するように設定して、車両を運転するステップと、坂の上り坂を走行中に、車両の減速によって、車両設定目標速度より低い第1車速(Vmin)まで車速が低下し、しかも減速が0に減少した、又は車両設定目標速度まで車速を高めるために車両が加速し始めた第1車両位置(A)を登録するステップと、頂上から第1距離(y1、y2)を過ぎた地点での、頂上から下り坂の第2位置(C1、C2)における所望の車速(Vbcc超過速度)を登録するステップと、前記所望の車速に基づいて、第1距離(y1、y2)を走行中に最小限化又はゼロ燃料消費で、所望の車速に達することができるように、車両が頂上を通過しなければならない、頂上での車両最低速度(Vmin1、Vmin2、Vmin3)を計算するステップと、車両が、頂上を通過するとき車両最低速度(Vmin1、Vmin2、Vmin3)に達するように、第1車両位置(A)から頂上(B)までの第2距離(x)を走行中の車速を制御するステップとを含む。 (もっと読む)
車速制限装置及び車速制限方法
【課題】ASL制御時に設定リミッタ速度を超えて安全に車両を加速させる車速制限装置を提供する。
【解決手段】ASL制御時においてアクセルペダルの踏み込み量が所定量以上になったことが検知されたとき、車間距離に応じて自車両の加速制御を行うエンジンECUを備える。このエンジンECUは、車間距離が所定距離以上の場合、アクセルペダルの踏み込み量に応じた加速度で自車両を加速させ、車間距離が所定距離未満の場合、アクセルペダルの踏み込み量に応じた加速度よりも制限された加速度で自車両を加速させる。
(もっと読む)
車両用走行制御装置
【課題】ドライバが設定車速の変更操作中に、ナビゲーション装置から得られる制限車速に変更された時に、設定車速と制限車速とを一致させる。
【解決手段】車両用走行制御装置は、車両が定速走行する際の設定車速を設定するための操作手段2と、自車両が走行している道路の制限車速を取得する制限車速取得手段3とを備える。そして、変更手段1は、操作手段2による設定と、制限車速取得手段3により取得された制限車速の変化とが所定条件を満たす場合に、操作手段2による設定を無効にする。さらに、変更手段1は、設定車速を制限車速取得手段3により取得された制限車速と一致するように変更する。
(もっと読む)
車両用走行制御装置
【課題】車速変動許容範囲を最適な範囲に変更することができる車両用走行制御装置を提供する。
【解決手段】車両用走行制御装置は、車速を検出する車速センサ11と、目標車速を設定する復帰/加速スイッチ13およびセット/減速スイッチ14と、目標車速設定手段により設定された目標車速を含む車速変動許容範囲を設定する車速変動許容範囲設定手段と、車速変動許容範囲内において指示車速を算出する指示車速算出手段と、指示車速に基づいて車両の走行制御を行うスロットル開度制御部36と、乗員の操作により車速変動許容範囲を変更する上限車速変更スイッチ19および下限車速変更スイッチ20を備える。
(もっと読む)
車両用走行制御装置及びその方法
【課題】運転者の意思に合致させて、自車両を制限車速で走行させることができる。
【解決手段】走行制御システムは、制御目標車速を設定車速に設定するとともに(ステップS33、ステップS34)、制限車速を検出した場合には、推奨車速設定スイッチ42の操作を検出したときに、制御目標車速を制限車速に設定する(ステップS63→ステップS43)。さらに、その後、制限車速が変化する場合には、そのように変化する制限車速に制御目標車速を設定(追従)する(ステップS64→ステップS43)。
(もっと読む)
車速制限装置
【課題】車速制限制御再開時に速度超過があった場合に速やかに速度超過を報知する。
【解決手段】車両の走行速度を検出する車速センサ11と、乗員により設定された制限速度を記憶する記憶部15と、乗員のアクセル操作に関わらず走行速度が制限速度以下となるように車速制限制御を行う電子制御装置20と、走行速度が制限速度よりも大きく且つその速度偏差が所定値以上となる状態が判定時間以上継続した場合に乗員に対し速度超過を報知する報知装置19と、乗員の操作により車速制限制御を中断する中断スイッチ14と、乗員の操作により車速制限制御を再開する再開/増加スイッチ13と、を備えた車速制限装置1において、報知装置19は、車速制限制御再開時の走行速度が制限速度よりも大きく且つその速度偏差が所定値以上の場合には、速度偏差が所定値以上となる状態の継続時間に関わらず速度超過の報知を行う。
(もっと読む)
車速制限装置
【課題】制限速度を運転者の希望する値に容易に設定可能にする。
【解決手段】乗員により設定された制限速度を記憶する制限速度記憶部22と、自車両の走行速度が前記制限速度以下となるように制御する車速制御部23と、道路デ−タを記憶する道路データ記憶部12と、GPS受信器11で検出した自車両の位置および道路データ記憶部12に記憶された道路デ−タに基づいて自車両の道路位置を認識する道路位置認識部21と、を備え、制限速度記憶部22は、乗員により設定された制限速度と該制限速度が設定された自車両の道路位置とを対応させて記憶し、車速制御部23は、自車両が走行する道路位置に対応して制限速度が記憶されている場合には、自車両の現在位置に基づいて制限速度記憶部22に記憶された制限速度を選択し、この制限速度以下となるように自車両の走行速度を制御する。
(もっと読む)
1 - 20 / 34
[ Back to top ]