
Fターム[3D244AE21]の内容
Fターム[3D244AE21]の下位に属するFターム
制御定数(ゲイン)の変更 (35)
負帰還制御 (9)
Fターム[3D244AE21]に分類される特許
41 - 60 / 257
車両走行制御装置
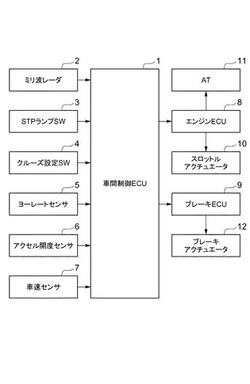
【課題】 車両が旋回中に所定の速度で走行する走行制御が開始された場合でも、ドライバ対して与える違和感を小さくすることができる車両走行制御装置を提供する。
【解決手段】 車間制御ECU1は、ヨーレートセンサ5から送信されるヨーレート信号および車速センサ7から送信される車速信号に基づいて自車両の旋回状態を検出する。ここで、自車両が旋回状態にあるときにクルーズ設定スイッチ4がONとされた場合には、ACCを開始するとともに、スロットル開度を0に設定して、現状のスロットル開度を維持するようにする。
(もっと読む)
速度制御装置

【課題】目標車速と上限車速を1つの設定手段で設定可能な速度制御装置を提供すること。
【解決手段】車両を目標車速で定速走行させる定速走行手段14と、上限車速を超えないよう車速を制限する速度制限手段15とを、を有する速度制御装置100であって、一体で目標車速及び上限車速の設定車速情報を入力する操作手段11と、車両情報を検出する車両情報検出センサ22、23と、操作手段から設定車速情報が入力された場合、車両情報に基づき目標車速又は上限車速いずれの入力かを判定する判定手段12と、判定手段の判定結果に応じて、設定車速情報を定速走行手段又は速度制限手段に送出する切替手段13と、を有することを特徴とする。
(もっと読む)
車両走行制御装置
【課題】 停止保持状態にある自車両が発進する際に、ドライバに与えるショック感を低減することができる車両走行制御装置を提供する。
【解決手段】 車間制御ECU1は、カメラ2から送信される画像信号に基づいて先行車両におけるブレーキランプの点灯状態を判断する。自車両が停止しているときに、先行車両のブレーキランプが消灯した場合に、自車両の駆動レンジをニュートラルレンジからドライブレンジに移行させる。
(もっと読む)
車両制御装置
【課題】より快適な運転フィーリングを実現することができる車両制御装置を提供すること。
【解決手段】本発明による車両制御装置1は、自車両の車速を検出する車速検出手段3aと、自車両と先行車両との車間距離及び先行車両の有無を検出する車間距離検出手段3bと、車速を設定車速に制御する及び車間距離を車速で除して算出された車間時間を設定車間時間に制御する車両制御手段3dと、前方情報を取得する前方情報取得手段5aと、前方情報に基づいて自車両を車線内に維持するように操舵装置の転舵力を制御する操舵制御手段5bと、運転者の先行車両に対する追従意思を推定する推定手段3cを備え、車両制御手段3dによる制御と操舵制御手段5bによる制御が同時に行われており、かつ、推定手段3cが追従意思を推定しない場合に、車両制御手段3dが車速を転舵力が制限値となる制限車速以下Vrとする制限車速制御を行うことを特徴とする。
(もっと読む)
車両用走行制御装置
【課題】よりドライバの感覚に合った走行制御を行う車両用走行制御装置を提供することを目的とする。
【解決手段】先行車との車間距離を目標距離に保つ車間制御モードと、前記先行車を確認できない場合に車速を設定車速に保つ定速制御モードとが切り替え可能で、前記車間制御モードから前記定速制御モードへの移行時であっても自車の走行環境が所定の走行環境である場合には当該移行に伴う加速を抑制する加速抑制制御を行う車両用走行制御装置であって、前記加速抑制制御を実行中にドライバによりアクセルペダルが踏下されたか否かの情報を取得するドライバ情報取得手段と、前記ドライバ情報取得手段により前記アクセルペダルが踏下された旨の情報を取得すると、前記加速抑制制御を解除して前記アクセルペダルの踏下に応じた加速を行う制御を行う車速制御手段とを有することを特徴とする。
(もっと読む)
車両用制動制御装置
【課題】車両用制動制御装置において、車両の定速走行制御時であっても、十分な負圧を確保して操作部材の操作力を適正に高めることで、十分な制動力を確保して制動操作フィーリングの向上を図る。
【解決手段】ハイブリッド車両11にて、車速が予め設定された目標車速となるようにエンジン12の出力とモータ16,19の出力が調整される定速走行制御を実行中であるとき、エンジン12の回転数が予め設定された所定値を超え、且つ、燃料カットの実行が検出されると、エンジン12の吸気管227に設けられたスロットル弁229を閉止する。
(もっと読む)
鞍乗型車両用の制御装置および鞍乗型車両
【課題】定速走行制御が実行される鞍乗型車両の操作性を向上させる
【解決手段】鞍乗型車両用の制御装置100は、定速走行制御の目標車速を記憶する第1記憶部101と、アクセル全閉位置からさらに閉じる方向にアクセル12が操作されたことを検知する第1検知部104を備えている。さらに、この鞍乗型車両用の制御装置は、定速走行制御中において、第1検知部104によって、当該操作が検知されたときに、第1記憶部101に記憶された目標車速を下げる減速処理部105を備えている。
(もっと読む)
車両の走行制御装置
【課題】先行車の右左折を認識した際の目標車間距離を適正に設定し、運転者の要求に沿った走行制御を実現することができるようにする。
【解決手段】自車両1に搭載された、ステレオカメラ3aを備える前方認識装置3で認識した先行車情報に基づいて、少なくとも追従目標車間距離L1を設定し(S6)、次いで先行車1’の右左折を判定し(S7)、先行車1’の右左折を検出した場合、追従目標車間距離L1に補正係数KG(例えばKG=0.5)を乗算して、右左折時の追従目標車間距離L1を設定する(S8)。
(もっと読む)
車両走行速度制御装置および方法
【課題】車両の操舵角、ヨーレート、および車両の前方道路の情報を予め検出し、曲線路の進入または進出の際に車両の速度を制御して車両の安全性と乗車感を向上させることが可能な、車両走行速度制御装置およびその方法の提供。
【解決手段】車両の前方道路を撮影して映像データを取得し、前記映像データからカルマンフィルターを用いて前方道路情報を抽出する前方映像センサーと、前記前方道路情報を用いて車両の走行に必要な速度を計算する制御部と、前記計算された車両の速度に応じて車両の走行動作を調節する駆動部とを含んでなる、車両走行速度制御装置。
(もっと読む)
車両の走行制御装置
【課題】追従走行制御中に、先行車を見失った場合であっても、運転者に不快感及び違和感を与えることなく、運転者のフィーリングに合った報知を行うことができるようにする。
【解決手段】先行車を捕捉する前方認識装置3と、前方認識装置3で先行車を捕捉した場合に、この先行車に対する追従走行制御を行う制御ユニット2と、前方認識装置3が先行車を捕捉したとき或いは捕捉した先行車が離脱したときに報知するブザー6cとを備え、制御ユニット2は、前方認識装置3が先行車をロストしたときはブザー6cによる報知を禁止する。
(もっと読む)
車輌制御装置
【課題】倒立制御車輌における自動追従制御の精度を向上させる車輌制御装置を提供する。
【解決手段】本発明は、倒立制御を行う先行車輌に対し、追従走行する車輌を制御する車輌制御装置であって、前記先行車輌からの走行状況データ(車輌速度、車体傾斜角)を受信する通信部81と、前記追従走行する車輌の加速度指令値を演算する主制御ECU21と、を備え、主制御ECU21は、通信部81によって受信した走行状況データから、前記先行車輌の状態を推定し、当該先行車輌の状態に基づいて、前記追従走行する車輌の加速度指令値を演算することを特徴とする。
(もっと読む)
車両用追従装置
【課題】不要に移動体が先行車として設定されることを低減し、制御精度の向上が図られた車両用追従装置を提供すること。
【解決手段】設定された先行車に追従する追従制御を行う車両用追従装置において、自車両100前方の他車両102の方向指示器が作動中であると判定された場合に、他車両102の方向指示器が作動中であると判定されなかった場合より、他車両102を先行車と設定し難くするように設定条件を変更する設定条件変更手段を備える構成とする。これにより、自車両100前方の他車両102が車線を離脱する可能性が高いにも関わらず、不要に先行車として設定されることを防止する。また、他車両102が先行車として設定されている場合には、設定された他車両102が車線を離脱する前に、先行車としての設定を解除し易くする。
(もっと読む)
車両用追従装置
【課題】不要に移動体が先行車として設定されることを低減し、制御精度の向上が図られた車両用追従装置を提供すること。
【解決手段】追越車線判定手段によって、利用可能な追越車線108が有ると判定された場合に、利用可能な追越車線108が有ると判定されなかった場合に比して、移動体102を先行車と設定し難くするように設定条件を変更する設定条件変更手段を設ける。これにより、追越車線108を利用して追越し行うことができる場合に、移動体102を先行車と設定し難くする。そのため、運転者が自車両100より前方の移動体102を追い越す可能性が高いにも関わらず、不要に移動体102を先行車として設定することを防止する。
(もっと読む)
追従走行制御システム
【課題】 先導車両のジャークに起因した追従車両の乗り心地悪化を抑制することができる追従走行制御システムを提供する。
【解決手段】 追従走行制御システム1は、先導車両に搭載された送受信器5及びECU6を備えている。ECU6は、スロットル開度を設定するスロットル開度設定部8と、スロットル開度とエンジン回転数とに基づいて要求エンジントルクを設定する要求E/Gトルク設定部9と、送受信器5で受信された後続車情報を入力し、後続車情報に含まれる乗車状態に関する情報に基づいてエンジントルク変化率制限値を設定するE/Gトルク変化率設定部10と、エンジントルク変化率制限値を用いて要求エンジントルクにリミッタをかけることで最終要求エンジントルクを求め、この最終要求エンジントルクに応じてスロットルアクチュエータ15を制御する要求E/Gトルク補正部11とを有している。
(もっと読む)
車両の走行制御装置
【課題】自車両の設定車速を走行環境に適した車速に変更することができる車両の走行制御装置を提供する。
【解決手段】車両の走行制御装置1は、ECU2と、対向車両の車速を検出するレーダセンサ3とを備えている。ECU2は、レーダセンサ3によって検出された対向車両の車速に基づいて、自車両の設定車速を決定し、その設定車速に応じてエンジン・AT制御ECU6及びブレーキ制御ECU7を制御することで車両の駆動・制動制御を行う。
(もっと読む)
車両の走行制御装置
【課題】走行ルールに違反した原因を調査可能な車両の走行制御装置を提供する。
【解決手段】車両に搭載され、当該車両の走行を制御する走行制御装置10であって、車両の周辺の走行ルールにしたがって車両の走行を制御する走行制御部35と、車両による走行ルールの違反を判定する違反判定部37と、違反判定部により走行ルールの違反が判定された場合に、走行制御部の制御内容を記憶する記憶処理部38と、を備える。
(もっと読む)
車両用走行制御装置
【課題】車両の燃費を向上させつつ、運転者の走行意思を車両の走行挙動に適切に反映させる。
【解決手段】車両用走行制御装置10は、アクセルペダル開度APを検出するアクセルペダルセンサ32と、車速Vを検出する車速センサ31と、走行路の勾配Slopeを検出する勾配センサ34と、クルーズ走行の実行有無を判定するクルーズ走行判定部と、車速Vを略一定に維持する車速維持クルーズまたは駆動力を略一定に維持する駆動力維持クルーズの選択を判定するクルーズ制御切換判定部とを備え、クルーズ走行の実行状態において、走行路が降坂路であって車速Vが所定速度(例えば、最高燃費車速Vbest)よりも遅い場合、あるいは、走行路が登坂路であって車速Vが所定速度(例えば、最高燃費車速Vbest)よりも速い場合には、駆動力維持クルーズを選択する。
(もっと読む)
走行制御装置及び車両
【課題】ドライバによる手動操作でも目標加減速度を容易に達成することができる走行制御装置を提供することを課題とする。
【解決手段】少なくとも車両の加減速を制御する走行制御装置であって、誘導目標加減速度に対応するアクセル操作量又はブレーキ操作量のレンジを誘導目標加減速度外に対応するアクセル操作量又はブレーキ操作量のレンジより広く設定する加減速度特性設定手段を備えることを特徴とし、加減速度特性設定手段では、アクセル操作量と当該アクセル操作量に対応する加減速度との関係及びブレーキ操作量と当該ブレーキ操作量に対応する加減速度との関係を規定する基本マップBM1に対して、誘導目標加減速度を達成するための加減速度に対応するアクセル操作量又はブレーキ操作量のレンジを広く設定したマップGM1を生成する。
(もっと読む)
車両の走行制御装置
【課題】設定された自動走行車速を維持するように加減速制御を行う場合に、自動走行車速が自動走行解除車速付近の速度である場合に、走行路が登坂路である場合でも、加減速制御を無用に中止させないようにする、車両の走行制御装置を提供する。
【解決手段】自動走行車速VAが自動走行解除車速VX1付近の車速Vm1〜Vm2であるか否か判定され、車速Vが減速しているか否か判定され、自動走行車速VAの設定時に、前記両判定が肯定の場合に、自動走行解除車速VX1が所定時間Tc無効にされる。
(もっと読む)
車両の走行制御装置
【課題】設定された自動走行車速を維持するように加減速制御を行う場合に、自動走行車速が自動走行解除車速付近の速度である場合に、走行路が登坂路である場合でも、加減速制御を無用に中止させないようにする、車両の走行制御装置を提供する。
【解決手段】ACCセットSWの操作時の車速Vaが自動走行解除車速VX付近の車速Vm1〜Vm2であるか否か判定され、車速Vが減速しているか否か判定され、ACCセットSWの操作時に、前記両判定が肯定の場合に、自動走行車速VAとしてACCセットSWの操作時の車速Vaに所定速度Vαを加算した加算車速Va+Vαが設定される。
(もっと読む)
41 - 60 / 257
[ Back to top ]