
Fターム[3D246GB27]の内容
ブレーキシステム(制動力調整) (55,256) | 目的、効果−制御機能 (5,653) | 衝突防止 (795)
Fターム[3D246GB27]の下位に属するFターム
緊急時制動補助(ブレーキアシスト) (205)
予備制動、警告のための制動 (43)
余裕度、安全度、危険度に応じた制御 (297)
Fターム[3D246GB27]に分類される特許
241 - 250 / 250
車両用走行制御装置

【課題】自車両前方の物体との相対位置関係に基づいて自車両の走行を制御する走行制御手段を備えた車両において、自車両前方の物体を認識するセンサに検出範囲が変化する衝撃が加わった場合に、安全走行を確保する。
【解決手段】衝突回避判断手段の判断結果に基づいて自車両を自動制動制御する自動制動制御の終了後、衝突回避判断手段が衝突回避不可能と判断した結果に基づいて、自動制動制御手段による自動制動制御、又は走行制御手段による走行制御が作動され難くなるように作動条件を変更する。
(もっと読む)
車両用運転操作補助装置

【課題】運転者の操作を将来の走行環境に応じて適切にアシストできるような車両用運転操作補助装置を提供する。
【解決手段】レーザレーダ10,前方カメラ20,後側方カメラ21および車速センサ30によって、車両状態および車両周囲の走行環境を検出する。コントローラ20は、検出された車両状態、走行環境から、車両もしくは車両周囲の走行環境の将来を予測し、将来において必要な運転操作量、例えば操舵反力を推定する。操舵反力制御装置60は、必要な操舵反力となるようにサーボモータ61を制御し、運転者の操作を補助する。
(もっと読む)
車両の駆動システム
車両用電気駆動システム。前記駆動システムは、前記車両の少なくとも一つの車輪に電気モーターを含み、前記電気モーターは前記車両の前記車輪に関連するブレーキディスクの回転トルクを誘導するよう適合された電界源から構成される。他の形状では、車両の車輪にトルクを与える方法が提供され、前記車輪は機械的に関連するブレーキディスクロータを有し、前記方法は前記ロータをモーターロータとして利用し、それによって前記ロータはディスクブレーキおよびモーターロータの二重機能を実行する。 (もっと読む)
追突事故を防止する方法および装置
本発明は、車両前部の方向に向けられた環境センサ(2)を用いて、自車両の前方に存在する車両との間隔(d)および/または速度(vrel)を求め、始動状況にある際に、自車両が自車両の前方に存在する車両と衝突する危険が存在するか否かについて、運転者により操作される直線走行設定(alpha FP, alpha BP)を評価し、衝突の危険が存在する場合に、衝突の危険を低減させるために車両の駆動装置(10)および/または減速装置(11)に介入し、および/または、運転者に衝突に危険を知らせるために運転者警告装置(12,5)を駆動する、自車両の前方に存在する車両の後方で始動する際に追突事故を防止する方法および装置に関する。 (もっと読む)
自動車や他の車両の走行運転の制御方法
本発明は、個々の車輪および/又は動力伝達系の構成要素に付設された回転センサを介して、所定の走行状態が検出され、制御装置で評価され、車両の所定の機能に対する制御指令や警報信号に転換される、自動車などの走行運転の制御方法に関する。このようにして、例えばABS装置(アンチロックブレーキシステム)、ASR装置(アンチスリップレギュレーションシステム)あるいはEBS装置(電子制御ブレーキシステム)が制御される。
本発明は、従来公知の回転数センサに代えて、回転方向センサを利用することを提案する。回転方向センサは、実際回転方向の検出のほかに、そもそも回転運動が存在するか否かも検出できる。回転方向センサにより、車両の多くの機能を簡単に制御できる。また、回転方向を求めるために従来利用されていた種々のパラメータによる確定計算法を省くことができる。
(もっと読む)
車両乗員保護手段を作動するための方法及び装置
本発明は、運転状態データを検出するセンサシステムと、衝突前にトリガされ、作動位置に移行することができる可逆的乗員保護手段(4)とを有する車両(1)における、乗員保護手段(4)を予防的にトリガするための方法及び装置に関する。本発明によれば、少なくとも1つの危機的な運転状態が発生する場合には乗員保護手段(4)をトリガする制御信号(SS)が起動され、前記危機的な運転状態がもはや存在せず、かつ少なくとも1つの検出された制御可能な運転操作を表す少なくとも1つの他の条件に従って、制御信号(SS)は起動解除され、それにより乗員保護手段の初期状態へのリセットが開始される。 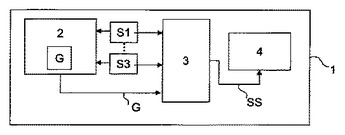 (もっと読む)
(もっと読む)
衝突後における車両の安定化方法および装置
【課題】衝突後において、それに続く潜在事故の危険性および重大性を低減させるために、車両が有効に安定化され且つ同時に明らかに減速される、車両の安定化装置および方法を提供する。
【解決手段】衝突後における車両(9)の安定化装置は、制御アルゴリズム(4)を有する制御装置(1)と、走行状態を表わす異なる変数(ay、δ、dΨ/dt)を測定するためのセンサ装置(2)と、安定化係合を実行するためのアクチュエータ(3)とを含む。車両(9)の走行状態が、衝突の発生に関してモニタリングされ、少なくとも一部ドライバのかじ取り希望とは独立の、車両運動変数(ay、dΨ/dt、β)に対する目標値(aysoll、dΨsoll/dt、βsoll)が計算され、衝突の場合、車両(9)の車両運動変数(ay、dΨ/dt、β)がこの目標値(aysoll、dΨsoll/dt、βsoll)に制御される。
(もっと読む)
駐車支援装置および駐車支援方法
本発明は車両用の駐車支援装置および駐車支援方法に関する。本発明では走行区間が始点から終点までの道程として記憶される。続いて車両が記憶された走行区間に沿って自動ガイドされる。  (もっと読む)
(もっと読む)
軌条走行車両のブレーキ装置
本発明は軌条走行車両のためのブレーキ装置に関し、ブレーキ制御ユニットがデータバスシステムを介して複数のブレーキユニットと接続されている。データバスシステムはテレグラムの伝達のために用いられ、データバスシステムには伝送エラーを識別するためフェイルセーフ装置が所属し、このフェイルセーフ装置は、伝送エラーが存在する場合ブレーキユニットを作動させるために、出力側で常用ブレーキ及び非常ブレーキのブレーキユニットと接続されている。 (もっと読む)
妨害物をかわす際に衝突を回避するおよび/または衝突の結果を軽くするための方法および装置
車両を妨害物に対してかわす際に衝突を回避しおよび/または衝突結果を軽くするための方法および装置が提案され、その際少なくとも1つの周辺センサを用いて少なくとも1つの妨害物(3)が識別されかつ妨害物のデータが求められる。更に妨害物のデータ並びに車両のデータに基づいて、妨害物をかわす過程を支援するのに有利な車両減速度が求められかつ車両が相応に減速される。  (もっと読む)
(もっと読む)
241 - 250 / 250
[ Back to top ]