
Fターム[3D246GB29]の内容
ブレーキシステム(制動力調整) (55,256) | 目的、効果−制御機能 (5,653) | 衝突防止 (795) | 予備制動、警告のための制動 (43)
Fターム[3D246GB29]に分類される特許
1 - 20 / 43
車両減速度制御装置
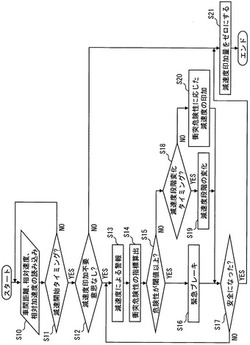
【課題】フェード現象やヴェイパーロック現象を抑制しつつ、ドライバに対して減速すべき状況であることを知らせることができる車両減速度制御装置を提供すること。
【解決手段】ディスクブレーキ及びドラムブレーキの少なくとも一方を用いた減速度と、エンジンブレーキを用いた減速度とを発生させることができる車両に搭載される車両減速度制御装置100であって、ディスクブレーキ及びドラムブレーキの少なくとも一方を用いた減速度を発生させて減速を開始するタイミングであるか否かを判定し(S10,S11)、減速を開始するタイミングであると判定された場合に、エンジンブレーキによって減速度を発生させることで減速を開始するタイミングであることを示す警報を行う(S13)。
(もっと読む)
車両の制動制御装置

【課題】エンジンブレーキが発生する場合においても、ガタ詰めが必要なモードにおいては、ガタ詰めが適切に機能する制動制御装置等を提供する。
【解決手段】自車両に備わる制動制御装置は、本制動の前に、自車両のディスクロータとブレーキパッドとの隙間を詰める事前制動を実行する事前制動部と、自車両の駆動力に基づいて、事前制動部による制動力を算出する算出部と、エンジンブレーキにより自車両の制動を実行するエンジンブレーキ制動部と、事前制動部による事前制動が必要であるか否かを判定する判定部と、事前制動部による制動を制御する制御部とを備え、制御部は、エンジンブレーキ制動部による制動力が、算出部によって算出された事前制動部による制動力よりも大きく、かつ、判定部による判定結果が肯定である場合に、事前制動部による制動を実行する。
(もっと読む)
車両制動制御装置
【課題】運転者の体格差によらず同じ制動感が体感される車両制動制御装置を提供する。
【解決手段】車両2を目標の減速度で減速させるよう制動する制動手段3と、車両2の運転者4の頭部位置を検出する頭部位置検出センサ5と、車両2の減速度と運転者4の頭部位置と頭部に生じる減速度との関係があらかじめ設定されており、この関係に頭部位置検出センサ5で検出された頭部位置を適用し、頭部に生じる減速度があらかじめ設定された適正値となるよう、制動手段3に与える目標の減速度を設定する目標減速度設定部6とを備える。
(もっと読む)
車両の運転支援装置
【課題】ドライバの意思を尊重しつつ、衝突防止制御を有効に機能させることができる車両の運転支援装置を提供する。
【解決手段】走行制御ユニット5は、制動制御中にドライバによるブレーキペダルの踏込操作を検出した場合には、自車両1と制御対象との衝突の可能性があることをドライバが認識している可能性が高いと判断して制動制御を中断する。これにより、ドライバの意思に反する不要な制動制御の介入を防止することができる。その一方で、制御対象との衝突の可能性が高い状況下でドライバによるブレーキペダルの踏込量が解放側に設定速度以上で変化した場合には、一旦中断した制動制御を再開する。これにより、衝突防止制御を有効に機能させることができる。
(もっと読む)
車両の運転支援装置
【課題】実際に生じる様々な値の障害物情報の信頼度に対して、その信頼度に適した衝突防止制御を選択して実行することで、きめの細かい自然な感覚の衝突防止制御を行う。
【解決手段】走行制御ユニット5は、ステレオ画像認識装置4からの制御対象の各種制御情報に基づいて障害物の検出の信頼度を、例えば、障害物の検出時間に応じて算出する。走行制御ユニット5には、障害物に対する衝突を防止する衝突防止制御として、複数の制御タイプ(例えば、4つの制御タイプ(タイプA、タイプB、タイプC、タイプD))が予め記憶されており、高速走行時には、タイプA、タイプB、タイプCの3種類の制御タイプの中から信頼度に応じて衝突防止制御が選択され、低速走行時には、タイプA、タイプD、タイプCの3種類の制御タイプの中から信頼度に応じて衝突防止制御が選択されて実行される。
(もっと読む)
自動制御装置
【課題】操作者の意思に反して自動制御が解除されてしまうことを抑制できる自動制御装置を提供する。
【解決手段】自動制動制御手段11は、制動装置20を制御することで自動的に制動力を発生させる自動制動制御を行う。制御解除手段12は、自動制動制御中にアクセルペダル操作量が所定量以上となったと判定したことに基づいて、自動制動制御を解除させるための解除信号を自動制動制御手段11に出力する。ただし、自動制動制御中に運転者がアクセルペダル40を所定量以上踏み込んでしまった場合であっても、誤操作判定手段13により、そのアクセルペダル操作が誤操作であると判定された場合には、制御解除手段12は解除信号を自動制動制御手段11へ出力しない。よって、運転者の意思に反して自動制動制御が解除されてしまうことを抑制できる。
(もっと読む)
車両用の電子制御システム及び車両システムで運転者に依存しない少なくとも1つの介入を算出する方法
【課題】車両が物体との衝突を回避する電子制御システム及び方法を提供する。
【解決手段】リスクコンピュータによって、車両システムへの運転者に依存しない少なくとも1つの、しかしながら特に多数の介入を算出する方法。プリセットされている車両データ,環境データ,実際の車両及び運転者のデータ,車両内外の人のデータ等が、このリスクコンピュータの入力部に入力される。このリスクコンピュータは、これらのデータに基づいて車両とこの車両の内側及び外側にいる人との危険状況を評価しこの評価及び場合によってはその他の基準値又は重み付けに応じて、アクチュエータを制御する制御信号を出力する。人及び車両に対する最大の保護作用が、優先回路にしたがって得られるように、これらのアクチュエータは、車両の運転者の行動及び/又は乗客の保護及び/又はその他の道路使用者(歩行者,自転車に乗る人等)に対する保護手段を変更又は起動する。
(もっと読む)
車両運転支援装置
【課題】交差点に進入しようとする車両の運転者の操作を尊重し運転者による操作を妨げないようにする車両運転支援装置を提供する。
【解決手段】交差点60での一時停止見落とし等を原因とする出会い頭シーン等での事故発生シーンを想定すると、一般に、非優先車両12nは車速Vが低く、優先車両12pは車速Vが高いことが推定される。自車12が優先車両(優先側車両)12pで、車速Vが所定値(例えば、20[km])より低い場合には予圧をかけ車速Vが所定値より高い場合では予圧を少なく(ゼロを含む)することで、的確なブレーキ予圧を付与することができる。
(もっと読む)
衝突被害軽減装置、及びその方法
【課題】交差点における停止線で停止している自車両に後続車両が追突するときに、交差車線、或いは横断歩道に飛び出してしまう可能性を可能な限り低くし、且つ、上述した追突の被害を可能な限り低くできる衝突被害軽減装置、及びその方法を提供する。
【解決手段】後続車両に追突されたときの被害を自車両の制動力を制御して軽減する衝突被害軽減装置であって、自車両が追突されたときに生じるエネルギーを推定する推定手段と、交差点において停車している自車両から予め定められた停止位置までの距離を測定する測定手段と、エネルギーと停止位置までの距離とに基づいて自車両の制動力を予め制御する制動力制御手段とを備える。
(もっと読む)
居眠り判定装置及びプログラム並びに警報出力装置及びプログラム
【課題】短時間で正確に居眠りを判定する。
【解決手段】居眠り判定装置は、被験者の眼球位置を検出する眼球運動検出部21と、検出された被験者の眼球位置に基づいて、緩徐眼球運動を検出する緩徐眼球運動算出部26と、緩徐眼球運動が検出された場合に、前記被験者は居眠り状態であると判定する居眠り判定部34と、を備えている。
(もっと読む)
車両の液圧式ブレーキシステムのためのブレーキ液を移動させ、貯留するための方法および装置
本発明は、車両の液圧式ブレーキシステムのためのブレーキ液を移動させ、貯留するための方法および装置に関する。ブレーキシステムは、少なくとも1つの液圧アキュムレータと、少なくとも1つのブレーキブースタと、少なくとも1つのブレーキ回路とを備え、ブレーキブースタは、ブレーキブースタの作動によって運転手が操作しなくても自動的にある容積のブレーキ液を移動させることができるように構成されている。本発明の本質は、ブレーキブースタの自動的な作動によってブレーキ液が液圧アキュムレータ内に移動し、貯留され、ブレーキシステムの動作状態に関係して、貯留されたブレーキ液の少なくとも一部が液圧アキュムレータからブレーキ回路に排出されることである。 (もっと読む)
運転支援装置
【課題】路面の摩擦係数(路面μ)が低い場面でも、障害物と車両Cの接触の可能性がある場合に、運転者に違和感を与えることなく、車両Cを適切進路から逸脱し難くなるように制御できる運転支援装置1を提供する。
【解決手段】障害物の回避を支援するステアリング制御又はブレーキ制御の制御量を算出し、この制御量で所定の制御開始時期からステアリング制御又はブレーキ制御を実施することで運転を支援する運転支援装置1において、ステアリングホイール3に振動をさせ、この振動に起因する車両挙動又は操舵角の変化量に応じて、路面μが低いか否かを判定し、路面μが低いと判定された場合に制御量又は制御開始時期を補正する。
(もっと読む)
自動車の周囲環境のモニタリング方法
【課題】 自動ブレーキの不適切な作動を防止しながら、1つの進路にしたがって移動することができる自動車の周囲環境をモニタする方法を提供する。
【解決手段】 本発明の方法は、検出センサ、自動車に関するパラメータ、および自動車の周囲環境内にある障害物に基づいて、複数の運転危険度を計算するステップと、障害物が、自動車の進路上にあるか否かを特定するステップと、計算された運転危険度、および自動車の進路上の障害物の特定に基づいて、自動車のブレーキの作動に関する判定を行うステップとを含んでいる
(もっと読む)
車両用運転操作補助装置、車両用運転操作補助方法および自動車
【課題】より運転者の意図に整合する運転操作支援を行うこと。
【解決手段】本発明に係る自動車では、制御仮値設定手段が、自車両のリスクが縮小する方向に車両制御手段における車両制御の仮値を設定し、仮値に基づいて車両制御手段が実行した車両制御に対する運転者の応答操作を応答検出手段が検出する。制御本値設定手段は、応答検出手段によって検出された運転者の応答操作に基づいて、車両制御の本値を設定する。
(もっと読む)
ドライバ状態検出装置、車載警報装置、運転支援システム
【課題】ドライバの運転状態を総合的に検出することができるドライバ状態検出装置を提供する。
【解決手段】自車両の進行方向に先行車両が存在する場合、ドライバからみた先行車両の像の大きさの変化度合いを示すドライバ状態係数Kを算出し、このドライバ状態係数Kからドライバの運転状態を検出する。このドライバ状態係数Kは、自車両に先行車両の画像を撮影する撮像手段を備えておき、その撮像手段の撮影した先行車両の画像の面積の単位時間当たりの変化度合いから算出する。
(もっと読む)
衝突軽減制御装置
【課題】この発明は、被害時に被ったエネルギを吸収して損害を抑制し、乗員への被害を軽減し、車両の挙動が不安定とならないようにすることを目的としている。
【解決手段】この発明は、衝突軽減制御装置において、衝突軽減制御手段は、予知装置により側方衝突が予知された時に、予知された衝突が発生する衝突発生側を判別し、自動ブレーキ制御装置を、ブレーキ装置が作動しない程度に遊びをなくす与圧駆動制御し、拘束制御装置がシートベルト装置に設けたモータを駆動して所定の状態までシートベルトを巻取るよう巻取り駆動制御し、サスペンション制御装置は衝突発生側とは車両上で逆側のサスペンション装置を選出した上でそれらの減衰力を衝突発生側と比較して減少させるよう減衰力低減制御し、警報装置を所定の状態で警報動作制御する、第一の段階の統合制御を実施することを特徴とする。
(もっと読む)
運転支援装置及び運転支援方法
【課題】交差点Xに進入する際の車速を適正な速度となるように運転者の運転を支援する。
【解決手段】交差点Xに進入する際の目標位置若しくは該目標位置より手前側に判定位置を設定する共に判定位置における判定車速を設定する。上記判定位置において、自車両の車速が判定車速より低い場合には、第1の設定車速を選択し、自車両の車速が判定車速以上の場合には、上記第1の設定車速よりも低い設定車速を選択する。自車両が交差点Xに進入する際の車速を、選択した設定車速以下となるように制限する。
(もっと読む)
自動車用乗員保護装置
【課題】プリクラッシュセーフティシステムを搭載した車両に用いて好適の自動車用乗員保護装置に関し、衝突が予測される状況において乗員が受けるダメージを低減する。
【解決手段】車両に搭載され車両の衝突を推定する衝突推定手段15と、衝突推定手段15により車両の衝突が推定されると、車両衝突前に乗員に対して筋肉を刺激して筋肉を収縮させる筋肉刺激手段14とを有する
(もっと読む)
車両用歩行者検出装置
【課題】歩行者の立ち止まりからの動き出しについて精度良く判定できる車両用歩行者検出装置を提供する。
【解決手段】歩行者の挙動(走行路横断行動)に関し、歩行者の意思が反映された膝部位置移動速度及Vkt及び肩部位置移動速度Vstを用いて、歩行者動き出し条件式を、膝部及び肩部の運動エネルギの形(Vst/α)2+(Vkt/α)2>1 (但し、Vst>0且つVkt>0、α:正規化係数)とすることにより、その運動エネルギにおける速度の2乗値に基づき、歩行者8の挙動予測に及ぼす膝部位置移動速度Vkt及び肩部位置移動速度Vstの反映度を高め、判定精度を高める。
(もっと読む)
車両制御装置
【課題】安全装置が同一地点で所定回数作動する場合に、安全装置の誤作動を適切に防止する。
【解決手段】PCSシステム2に設けられたDSS_ECU4のPCS作動部11は、ミリ波センサ5から送信された障害物情報に基づいて、検出された障害物との衝突可能性を判断し、衝突可能性があると判断すると、PCSを作動させ、ブレーキECU6、体感警報装置7、警報表示装置8及び警報音発生装置9に衝突回避制御を行わせる。そして、DSS_ECU4の作動可否部12は、同一地点においてPCSの作動が所定回数以上あると、運転者の禁止操作に基づいて、PCS作動部11によるPCSの作動の可否を判断する。このため、このため、例えば、路上周辺の構造物を路上の障害物として誤検出しているなど、PCSが同一地点において所定回数作動する場合に、PCSシステム2の誤作動を適切に防止することができる。
(もっと読む)
1 - 20 / 43
[ Back to top ]