
Fターム[3D246GB27]の内容
ブレーキシステム(制動力調整) (55,256) | 目的、効果−制御機能 (5,653) | 衝突防止 (795)
Fターム[3D246GB27]の下位に属するFターム
緊急時制動補助(ブレーキアシスト) (205)
予備制動、警告のための制動 (43)
余裕度、安全度、危険度に応じた制御 (297)
Fターム[3D246GB27]に分類される特許
221 - 240 / 250
障害物検知装置

【課題】運転者の負担を軽減しつつ車両運行時の車両周囲の障害物に関する安全性向上を図ることができる障害物検知装置を提供する。
【解決手段】本発明の障害物検知装置100は、障害物識別部101の識別部101aが、画像パターンデータ記憶部105に格納される後述の画像パターンデータテーブルに記憶される障害物の画像パターンデータと、カメラ400によって撮像された障害物の画像データとをパターン比較し、比較結果の一致の尤度が所定値を超えるとされる場合に、その撮像された障害物が何であるかを特定することによって識別する。そして、報知制御部102が、障害物識別部101によって識別された障害物を運転者に認識しやすいように、表示装置300aに表示する障害物の画像表示を拡大、スクロール表示などをおこなうとともに、障害物の存在および障害物の名称を音声装置300bから発する音声によって運転者に報知する制御をおこなう。
(もっと読む)
車両の走行安全装置

【課題】物体との接触の可能性があると判断される場合、操舵トルクを付与する接触回避支援制御を行うと共に、その制御量を推定されるドライバの操舵特性に応じて補正するようにした車両の走行安全装置を提供する。
【解決手段】検出された物体との接触の可能性を判断する接触可能性判断手段(S14)と、検出された物体との接触の可能性があると判断される場合、操舵トルクを付与して接触回避を支援する接触回避支援制御を実行する接触回避支援制御実行手段とを備えた(S16からS38)車両の走行安全装置において、接触回避支援制御の制御量を算出し(S32)、算出された制御量を、推定されるドライバの操舵特性に基づいて補正し(S34)、補正された制御量に基づいて接触回避支援制御を実行する(S36)。
(もっと読む)
車両の衝突安全制御システム
【課題】事故発生の直前でこれから起こる現象を予測し、実際に起こり得る様々な事故形態に対応して歩行者保護性能を向上させる。
【解決手段】歩行者と自車両との衝突が不可避で衝突までの時間的余裕がある場合、衝突シミュレーション解析処理を実行し(S5)、歩行者の傷害を最小限とする保護デバイスの作動タイミングや車両挙動の最適解を探索する処理を、計算条件を変更しながら繰り返す(S5〜S8)。そして、傷害値が最小となったとき、或いは衝突までの時間的余裕がない場合、衝突シミュレーション解析の解析結果に基づいて、ブレーキや操舵による車両挙動制御を実行し、また、フードエアバッグやアクティブフード等の保護デバイスを作動させる(S9)。これにより、実際に起こり得る様々な事故形態に対応して歩行者保護性能を向上することができる。
(もっと読む)
車両の乗員保護装置
【課題】障害物との接触の可能性を判断し、接触の回避が困難と判断される場合、ステアリングを操舵する角度や状態を衝突に備えさせ、よって接触時の安全性を向上させるようにした車両の乗員保護装置を提供する。
【解決手段】検出された運動状態に基づいて検出された物体との接触の可能性を判断し、接触の回避が困難と判断される場合、検出された操舵角が、車両の直進時の操舵角を中心としてその左右に広がる所定の角度範囲からなる基準角度範囲にあるか否か判断し(S14,S16,S18,S22)、検出された操舵角が基準角度範囲にないと判断されるとき、操舵角が基準角度範囲となるようにステアリングホイールを駆動するステアリング駆動制御を実行する(S20,S24)。
(もっと読む)
制動力制御装置
【課題】制動力制御装置において、補填制動力付与手段が故障した場合でも、目標制動力付与手段で利用される負圧を確実に確保することにより、全制動力を安定的に発生させる。
【解決手段】制動力制御装置は、補填制動力付与手段が故障であるか否かを判定する故障判定手段(ステップ206,208)と、エンジンの駆動が停止し、車両が駆動用モータの駆動力のみにより走行している際に、ブレーキ操作部材が操作された場合、故障判定手段によって補填制動力付与手段が故障であると判定されると、停止しているエンジンを駆動させて負圧を発生させるエンジン再駆動手段(ステップ206,216、ステップ222,216)と、を備えている。
(もっと読む)
隊列走行制御装置
【課題】隊列走行の安定化と緊急時における適切な対応を図ることを可能とする隊列走行制御装置を提供する。
【解決手段】手動運転される先導車Aと先導車Aに自動追従走行する追従車B,Cとの隊列走行を制御する隊列走行制御装置10である。この装置10は、先導車Aの手動制動による減速度の上限値を設定する減速度上限値設定手部22を備え、減速度上限値設定部22は、先導車Aの前方状況、例えば、先行車Xとの距離Lf及び相対速度Vrや、先行車Xの有無に応じて、その上限値を変更する。
(もっと読む)
電源回路及びこの電源回路を備えたブレーキ制御装置
【課題】 負荷の形状の複雑化を回避しつつ、電源の失陥時であっても信頼性の高い失陥時対応制御を達成可能な電源回路及びその電源回路を備えたブレーキ制御装置を提供すること。
【解決手段】 第1の電源と第2の電源とを切り替えて、負荷駆動回路に電源を供給する電源供給回路の電源電圧を検出し、検出された電源電圧が異常の時は、第3の電源より電源供給回路または負荷駆動回路へ電源を供給する診断回路を備えた。
(もっと読む)
ブレーキ制御装置及びブレーキ制御方法
【課題】 失陥時であっても信頼性の高い失陥時対応制御を達成可能であって、かつ、完全な冗長系よりもコンパクトなブレーキ制御装置を提供すること。
【解決手段】 車両の全てのホイルシリンダ内圧力を制御する第1制御部と、車両のホイルシリンダを対角系統又は前後系統にグループ化し、該グループ化したうち1系統のみのホイルシリンダ内圧力を制御可能な第2制御部とを備え、前記第1制御部の異常時には、前記第2制御部により前記1系統のみ制御する。
(もっと読む)
自動走行車両および追尾システム
【課題】安定した隊列走行を実現すること。
【解決手段】先導車両に追従して自動走行する自動走行車両であって、前方車両との車間距離に応じて走行速度を制御する制御装置を具備する自動走行車両を提供する。
(もっと読む)
車両の衝突防止装置
【課題】運転者の入力操作による車両の運動制御と衝突防止装置による車両の運動制御との調整を行い、衝突回避能力を高いレベルに保ちつつ、車両の運動に対する運転者への違和感をできるだけ少なくした車両制御を実現できる衝突防止装置を提供することである。
【解決手段】運転者の運転状況検出手段11と、車両周囲の障害物の情報を基に障害物との衝突を回避するための回避運動計算手段12と、前記回避運動計算手段12の回避運動計算結果と前記運転状況検出手段11で検出した運転者の入力操作とを合成して障害物との衝突を回避する車両行動決定手段13と、前記車両行動決定手段で決定した車両行動に基づいて運転操作の支援を行う運転支援手段14を有し、車両行動決定手段13は、運動マップ上で運転者の入力操作と回避運動計算結果とに重み付けして運転者の入力操作と回避運動計算結果とを合成して障害物との衝突を回避するための車両行動を決定する。
(もっと読む)
車載用走行環境認識装置
【課題】
より精度の高い車載用画像認識処理装置を提供する。
【解決手段】
車両の外部を撮像する車載カメラ3a,3bからの信号を入力する入力部3と、入力部3で入力した画像信号を処理して外部環境の認識を妨げる要因を有する第1の画像領域を検出する画像処理部16と、画像処理部16によって検出された第1の画像領域の大きさ,位置、または第1の画像領域を有する車載カメラ3a,3bの設置場所の少なくともいずれか一つに基づいて、環境認識処理を行う第2の画像領域を決定する処理画像決定部17と、処理画像決定部17によって決定された第2の画像領域に基づいて車両の外部環境を認識する環境認識部20とを有する車載用走行環境認識装置。
(もっと読む)
車両の運転支援装置
【課題】現在の車両挙動のみならず、今後予想される車両挙動をも考慮して、直進状態からカーブ走行に至るまで、走行路の過渡状態における走行状況においても、車両の加減速度を適切に抑制し、先行車追従に際して円滑で違和感の無い快適な制御を可能とする。
【解決手段】追従走行制御の追従加減速制御において、自車速V0と自車両1に対する先行車の相対位置とに基づき自車両1が先行車に追従するのに必要な目標ヨーレートγtを演算する。また、目標ヨーレートγtに応じて第1の制限値Lmγ1を演算し、目標ヨーレートγtの単位時間あたりの変化量(γt−γtold)/Δtに応じて第2の制限値Lmγ2を演算し、目標ヨーレートγtと実ヨーレートγrとの偏差Δγ(=γt−γr)に応じて第3の制限値Lmγ3を演算し、これら第1,第2,第3の制限値の絶対値の最小のものを制限値Lmに設定して、目標加減速度aを制限値Lmで制限する。
(もっと読む)
車両の制御装置
【課題】路面の勾配変化に起因する安全性の低下を抑制する。
【解決手段】車両10において、安全システム500は、衝突フラグがONである場合に作動する。衝突フラグは、衝突フラグ設定処理により設定される。当該処理では、前方ミリ波レーダから出射されるミリ波が前方の物体に反射してなる反射波強度Prが閾値S1以上である場合に、当該反射強度に対応する物体が障害物として検出される。この障害物が静止物体でない場合、或いは自車勾配値G0と前方勾配値Gfとの差分の絶対値が基準値C2未満である場合には、衝突フラグがONとなる衝突予測時間TTCの閾値CtがCt1に設定される。一方、障害物が静止物体であり、且つ自車勾配値G0と前方勾配値Gfとの差分の絶対値が基準値C2以上である場合には、係る閾値Ctが、Ct1よりも小さいCt2に設定され、安全システム500が作動し難くされる。
(もっと読む)
車両用運転操作補助装置および車両用運転操作補助装置を備えた車両
【課題】運転者の運転意図に反した挙動を示すことのない車両用運転操作補助装置を提供する。
【解決手段】車両用運転操作補助装置は、自車両と前方障害物との車間時間および余裕時間に基づいて自車両のリスクポテンシャルを算出する。リスクポテンシャルが大きいほど、自車両に発生する駆動力を低下するとともに、アクセルペダルを操作するときに発生する操作反力を増大させる。アクセルペダル操作パターンから運転者の運転意図を検出し、加速意図が小さいほど、制駆動力制御における駆動力の低下量が大きくなるように補正する。
(もっと読む)
走行制御装置
【課題】複数種類の車両走行制御それぞれに対応した検出結果に基づいて走行制御を行うことができる走行制御装置を提供する。
【解決手段】ナビゲーションシステム12、前方ミリ波レーダ30、近距離ミリ波レーダ32、前方画像センサ40及び後方/側方/周辺画像センサ42の複数のセンサ類を備え、LKA部221、ACC部222、PCS部241の複数の走行制御システムを備えた走行支援システム1において、センサの優先順位は走行制御の全てについて固定されているのではなく、走行制御の種別それぞれに対応して優先順位が設定され、LKA部221等のそれぞれは優先順位に従ってセンサ類それぞれの検出結果を適用して車両を制御するため、複数種類の車両走行制御それぞれに対応した検出結果に基づいて走行制御を行うことができる。
(もっと読む)
車両減速の自動作動方法及びその装置
【課題】他の車両との衝突確率を表す変量が予め設定可能なしきい値を越えなければならず,その場合にしきい値は運転者反応,実際の走行状況又は環境状況に従って変更可能であることにより,衝突を阻止するために車両減速の自動作動方法と装置が提案される。
【解決手段】しきい値の変化を定めるために,操舵角度センサ,ブレーキペダルセンサ,アクセルペダルセンサ,車両速度を求める装置,走行路傾斜あるいは走行路勾配を求める装置,車両ヨーレートを求める装置,車両フロート角度を求める装置又は車両の環境内の,特に車両の前方領域内の静止対象と移動対象を検出する装置の信号が評価される。
(もっと読む)
自動車用ブレーキ油圧システムおよびその制御方法
【課題】 車間処理制御性能改善と、衝突被害軽減システムの応答性能向上を行なうとともに、耐久性を向上させることができる自動車用ブレーキ油圧システムおよびその制御方法を提供する。
【解決手段】
本発明は、自動車用ブレーキ油圧システムにおいて、第1および第2バルブに連結された第3アキュムレータおよび第13バルブと、第7および第8バルブに連結された第4アキュムレータおよび第14バルブと、を含めて構成され、プレフィルフラッグにより作動されるプレフィルモード進入時、第13バルブおよび第14バルブを開き、第3および第4アキュムレータに貯蔵された圧力が放出されてFL、RR、FR、RLキャリパーに作用し、リザーブフラッグにより作動されるリザーブモード進入時に閉まっていた第13および第14バルブを再び開き、既に油圧ラインに形成されていたブレーキ圧力を第3および第4アキュムレータに貯蔵することを特徴とする。
(もっと読む)
走行制御装置
【課題】地震の発生時において、車両により適切な走行を行わせることができる走行制御装置を提供する。
【解決手段】走行制御装置1は、周辺センサ32、周辺車認識部12、緊急地震速報システム受信機、走行制御計画生成部22を備え、走行制御計画生成部22は、緊急地震速報システム受信機により受信した緊急地震速報に基づいて減速及び停止を行う走行計画を生成し、周辺センサ32により取得した車両周辺の障害物状況により、他車との追突及び衝突の危険性がある場合には、衝突及び追突を回避するための別の走行計画を生成する。このため、追突などの危険事象を回避しながら、地震発生時の安全を確保することができる。
(もっと読む)
自動車の走行方向を検出するための方法
本発明は、事故回避保護システムを有する車両の走行方向を検出するための方法であって、次のステップ、
a)車両方向の車両の前の対象物を検出するステップと、
b)相互の相対位置に基づき車両と対象物が接触する可能性を算出するステップと、
c)対象物が接触する可能性に関する算出結果に基づき運転者によらない制動及び/又は操舵行程を作動するステップとを含む方法に関する。
保護システムの誤った作動を回避するために、本発明に従って、別のステップ、すなわち、
e)予防的に作用する保護システム114又はこの予防的に作用する保護システム114と結合された安全装置116を有する車両の走行方向を算出するステップ、及び後退走行が検出されたときに、運転者によらない制動及び/又は操舵行程を阻止又は中断するステップが提供される。 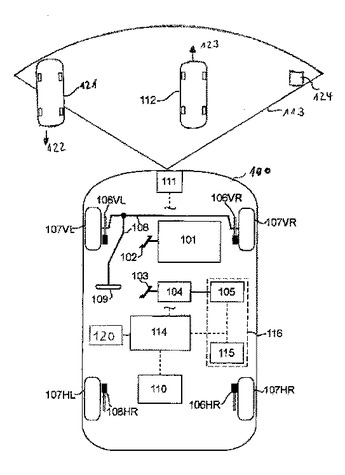 (もっと読む)
(もっと読む)
車両の走行ダイナミクスを局所的および時間的に評価および予測するためのドライバアシスタンスシステム
本発明は、交通システム内で車両の走行ダイナミクスを局所的および時間的に評価および予測し、得られた情報を隣接する車両に伝送するためのドライバアシスタンスシステムに関する。本発明では、評価される車両において相互に依存せずに生成されたデータが評価ユニットに収集されて評価され、該データから直後の走行状況に関する予測が生成され、該走行状況は、該走行状況に関与する周辺の車両に伝送される。 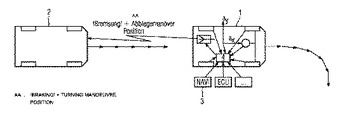 (もっと読む)
(もっと読む)
221 - 240 / 250
[ Back to top ]